Download to read offline

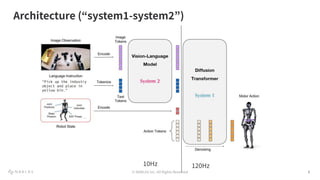
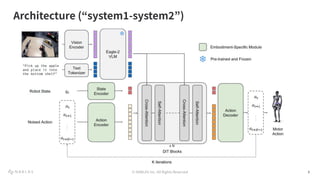




社内勉強会の資料「An Open Foundation Model for Generalist Humanoid Robot」を公開! この資料では、人型ロボット基盤モデル「GROOT N1」を紹介しています。 VLMとDiffusion Transformerを組み合わせた制御により、少ないデータでも高い成功率を実現する最新手法を解説しています。 "GROOT N1: An Open Foundation Model for Generalist Humanoid Robots". It features a VLM + Diffusion Transformer architecture that achieves high success rates with a limited amount of real robot data.