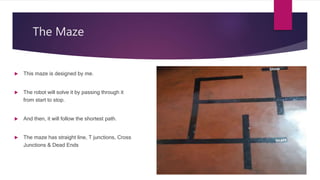
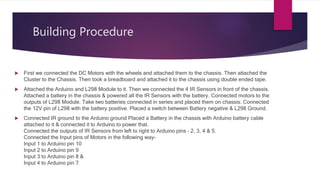
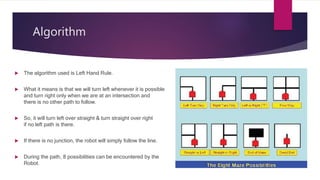
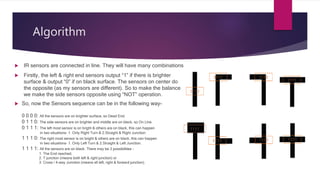
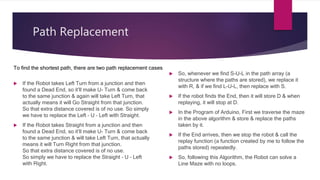
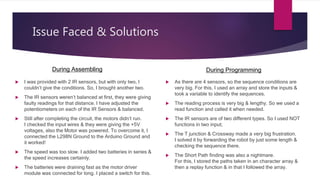
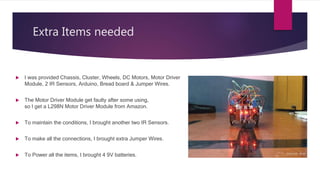
The document outlines a project on building a line maze solver robot using an Arduino microcontroller, infrared sensors, and a motor driver. It includes a detailed background on maze-solving robotics, the components used, the building procedure, and an algorithm (left hand rule) for navigation. The robot successfully solves open loop line mazes but is noted to struggle with closed loop mazes, with insights for future improvements included.