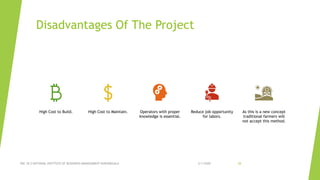
The document outlines a project on an Arduino-based line-following robot designed to automate the fruit transport system in an industrial setting, improving efficiency and reducing reliance on human labor. Key features include the use of various Arduino components like motors and sensors to navigate a specific path, with potential applications in multiple industries. The project faces challenges such as high costs and the need for skilled operators, but aims to enhance automation in Sri Lankan minor industrial plants.