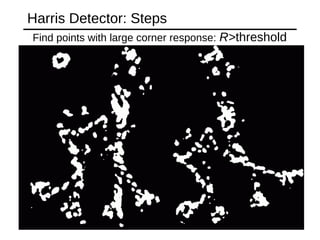
Here are the key steps in Harris corner detection:
1. Compute the autocorrelation matrix M for a window around each pixel using:
M = ∑w(x,y)[IxIx IxIy]
[IxIy IyIy]
Where Ix and Iy are the gradients of the image I in x and y directions.
2. Compute the corner response function R = det(M) - k(trace(M))^2
3. A large R value indicates a corner. Threshold R to find candidate corner points.
4. Refine the candidate locations using interpolation.
So in summary, Harris detection looks for pixels with









![11
of
65
Extrinsic Parameters
• translation parameters
t = [tx ty tz]
• rotation matrix
r11 r12 r13 0
r21 r22 r23 0
r31 r32 r33 0
0 0 0 1
R = Are there really
nine parameters?
extrinsic parameters are where the camera sits in the world](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-11-320.jpg)























































![Many Existing Detectors
Available
K. Grauman, B. Leibe
Hessian & Harris [Beaudet ‘78], [Harris ‘88]
Laplacian, DoG [Lindeberg ‘98], [Lowe 1999]
Harris-/Hessian-Laplace [Mikolajczyk & Schmid
‘01]
Harris-/Hessian-Affine [Mikolajczyk & Schmid ‘04]
EBR and IBR [Tuytelaars & Van Gool ‘04]
MSER [Matas ‘02]
Salient Regions [Kadir & Brady ‘01]
Others…](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-70-320.jpg)
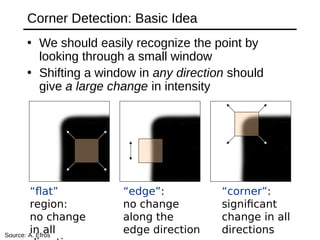
![Corner Detection: Mathematics
2
,
( , ) ( , ) ( , ) ( , )
x y
E u v w x y I x u y v I x y
Change in appearance of window w(x,y)
for the shift [u,v]:
I(x, y)
E(u, v)
E(3,2)
w(x, y)](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-72-320.jpg)
![Corner Detection: Mathematics
2
,
( , ) ( , ) ( , ) ( , )
x y
E u v w x y I x u y v I x y
I(x, y)
E(u, v)
E(0,0)
w(x, y)
Change in appearance of window w(x,y)
for the shift [u,v]:](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-73-320.jpg)
![Corner Detection: Mathematics
2
,
( , ) ( , ) ( , ) ( , )
x y
E u v w x y I x u y v I x y
IntensityShifted
intensity
Window
function
orWindow function w(x,y) =
Gaussian1 in window, 0 outside
Source: R. Szeliski
Change in appearance of window w(x,y)
for the shift [u,v]:](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-74-320.jpg)
![Corner Detection: Mathematics
2
,
( , ) ( , ) ( , ) ( , )
x y
E u v w x y I x u y v I x y
We want to find out how this function behaves for
small shifts
Change in appearance of window w(x,y)
for the shift [u,v]:
E(u, v)](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-75-320.jpg)
![Corner Detection: Mathematics
2
,
( , ) ( , ) ( , ) ( , )
x y
E u v w x y I x u y v I x y
Local quadratic approximation of E(u,v) in the
neighborhood of (0,0) is given by the second-order
Taylor expansion:
v
u
EE
EE
vu
E
E
vuEvuE
vvuv
uvuu
v
u
)0,0()0,0(
)0,0()0,0(
][
2
1
)0,0(
)0,0(
][)0,0(),(
We want to find out how this function behaves for
small shifts
Change in appearance of window w(x,y)
for the shift [u,v]:](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-76-320.jpg)


![Harris Detector [Harris88]
• Second moment
matrix
)()(
)()(
)(),( 2
2
DyDyx
DyxDx
IDI
III
III
g
83
1. Image
derivatives
2. Square of
derivatives
3. Gaussian
filter g(I)
Ix Iy
Ix
2 Iy
2
IxIy
g(Ix
2
) g(Iy
2
) g(IxIy)
222222
)]()([)]([)()( yxyxyx IgIgIIgIgIg
])),([trace()],(det[ 2
DIDIhar
4. Cornerness function – both eigenvalues are strong
har5. Non-maxima suppression
1 2
1 2
det
trace
M
M
(optionally, blur first)](https://image.slidesharecdn.com/saadalsheekhmulti-view-200308060806/85/Saad-alsheekh-multi-view-80-320.jpg)