Download to read offline


![© 2020 Wael Badawy
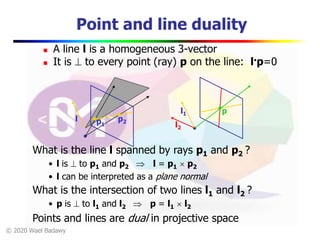
Homogeneous coordinates and lines
(X,Y,W) same as (SX,SY,SW)
Line in projective plane
ax + by + c = 0
aX + bY + cW = 0
uTp = pTu =0
u = [a,b,c] T and p = [X,Y,W] T
(x,y) Euclidean = (X/W,Y/W)
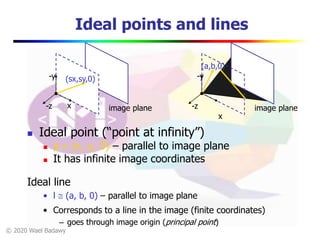
W = 0? Ideal points, points at infinity (X,Y,0)](https://image.slidesharecdn.com/lec12singlevieww-200719140423/85/Computer-Vision-single-view-Modelling-10-320.jpg)
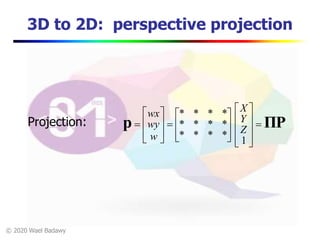
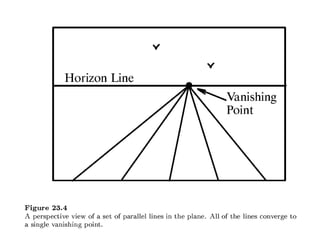
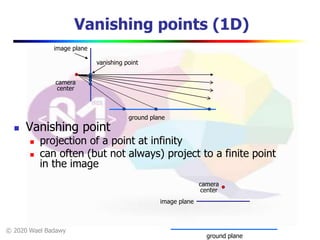
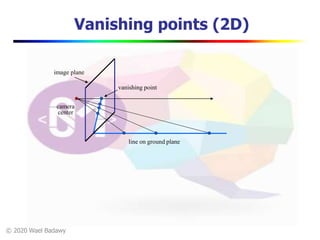
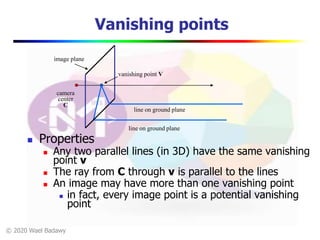
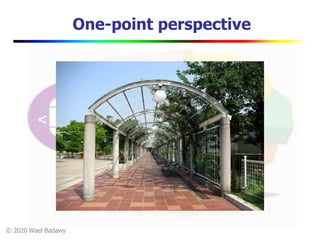
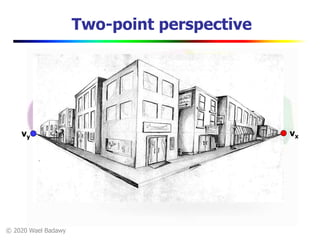
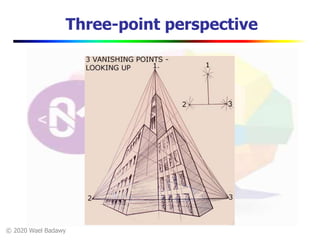
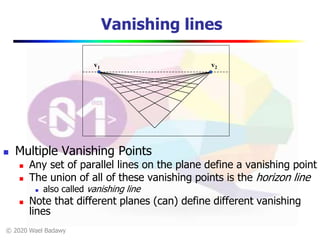
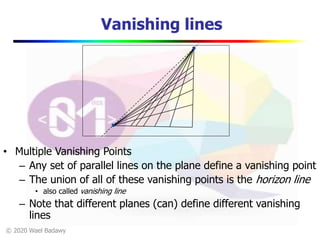
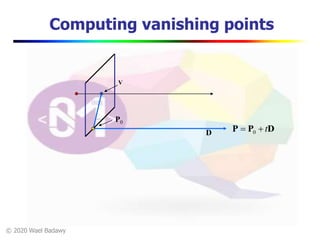
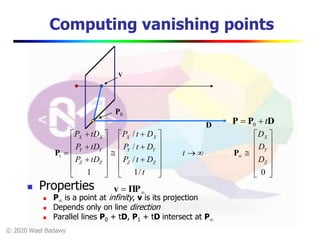
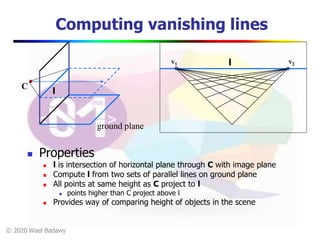

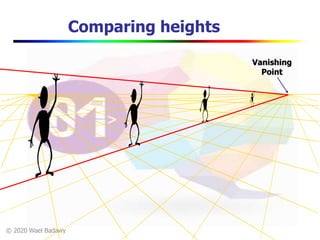
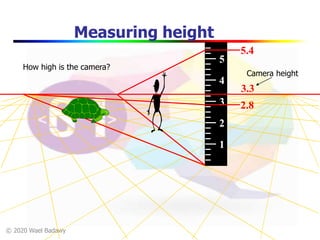
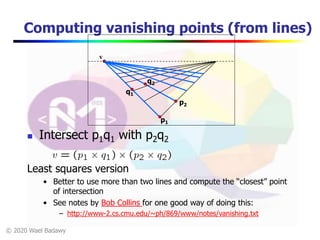

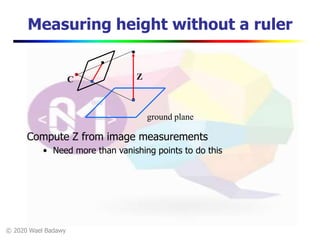
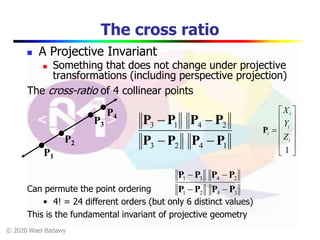
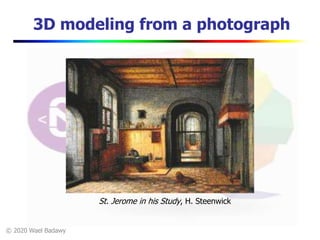
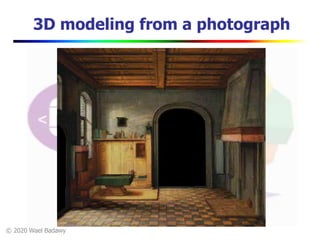
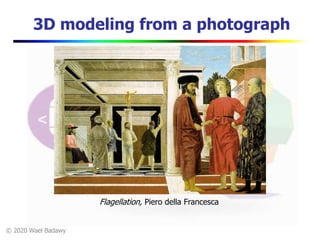
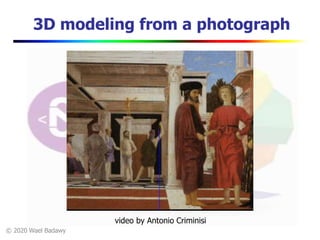
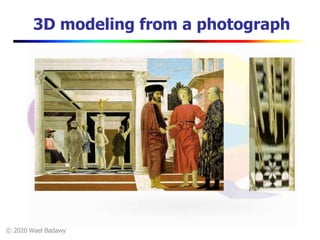
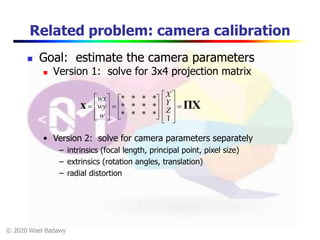
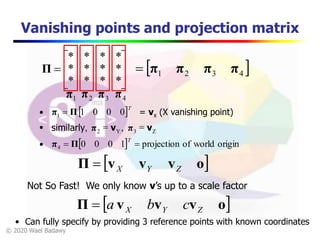
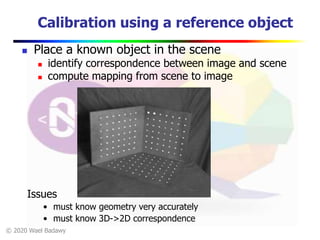


This document contains a video lecture on single-view modeling using computer vision and projective geometry techniques. It includes introductory information, copyright notices, and disclaimers. The content covers topics like vanishing points, lines, and perspectives; projective geometry principles; measuring distances in images; 3D reconstruction from photographs; and camera calibration. Sample applications demonstrated include estimating heights and modeling 3D scenes from 2D images.