Downloaded 12 times




![Extrinsics
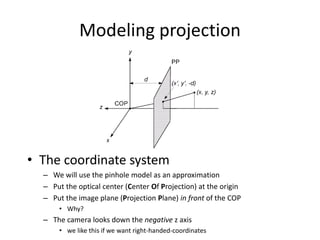
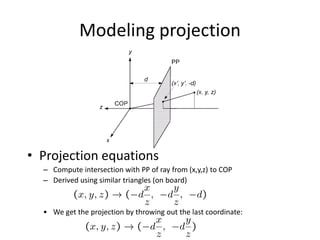
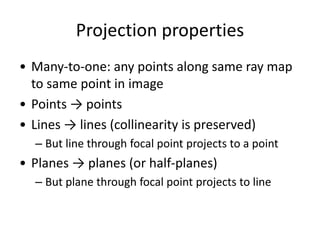
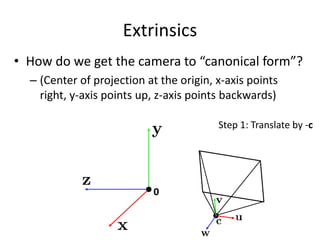
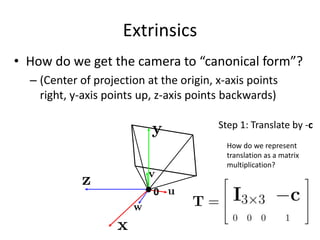
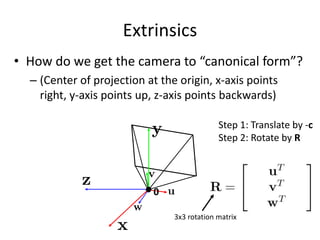
• How do we get the camera to “canonical form”?
– (Center of projection at the origin, x-axis points
right, y-axis points up, z-axis points backwards)
0
Step 1: Translate by -c
Step 2: Rotate by R
(with extra row/column of [0 0 0 1])](https://image.slidesharecdn.com/lec10cameras-200719135921/85/Computer-Vision-cameras-44-320.jpg)

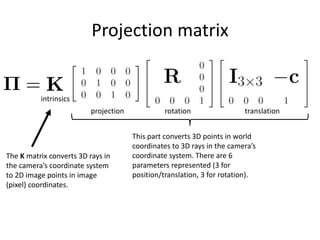
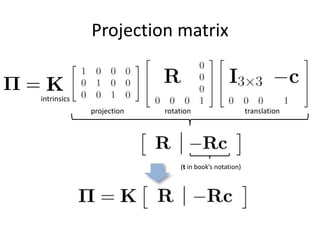
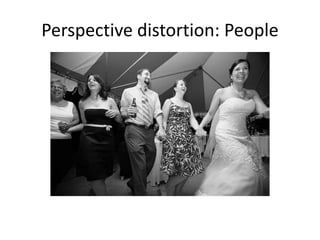
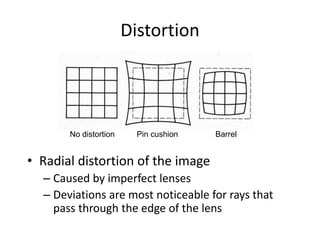

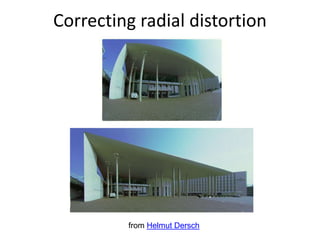
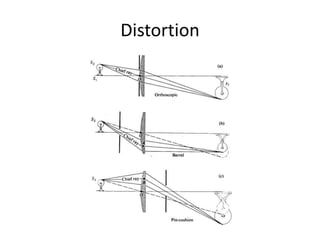
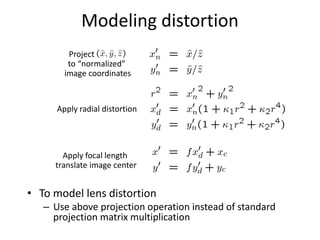



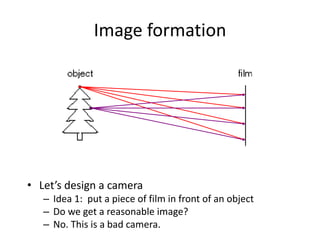
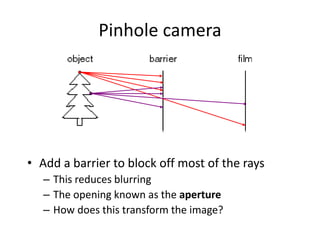
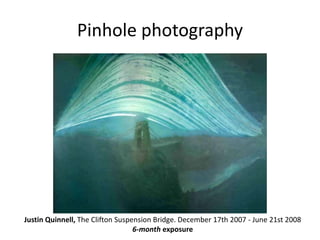
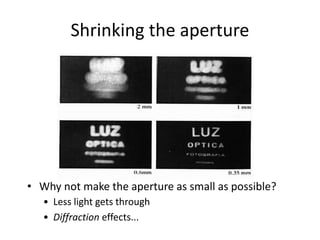
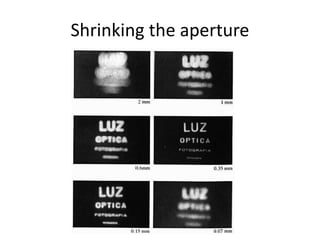
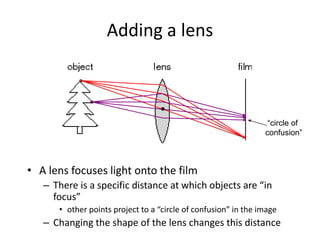
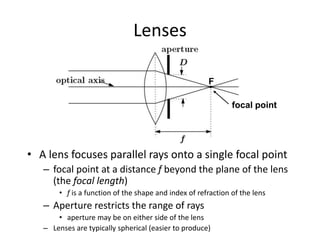
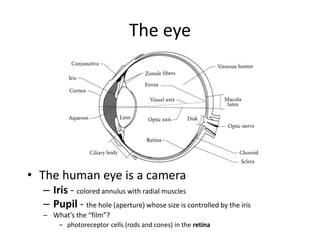
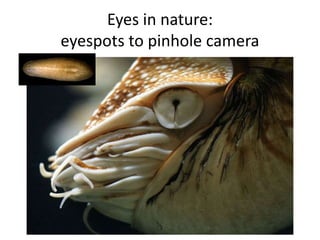
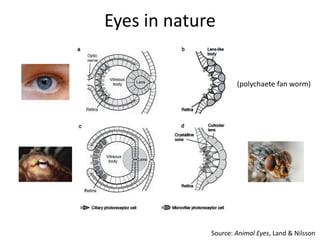
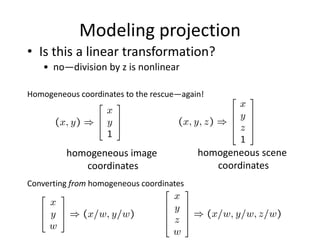
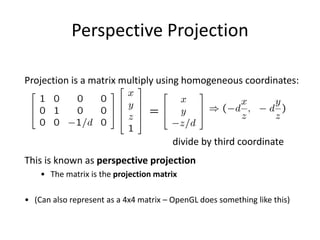
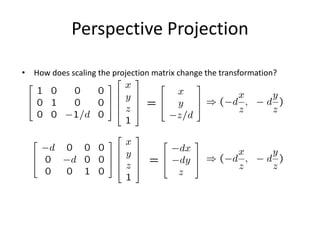
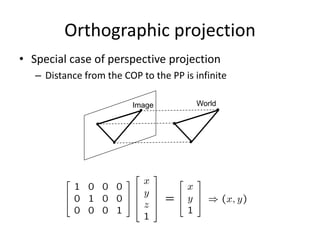
This document discusses camera models and image formation. It begins by describing the pinhole camera model and how a pinhole creates an image by blocking most light rays. A lens is then introduced to focus light rays onto film. Projection using the pinhole camera is modeled mathematically using homogeneous coordinates. Perspective projection is introduced, along with the camera projection matrix which models the camera's intrinsics and extrinsics. Distortion effects like radial distortion are also covered.