Download as PDF, PPTX
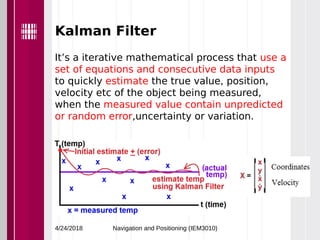
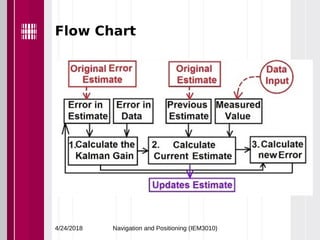
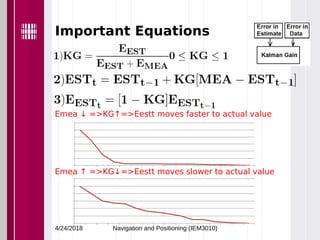

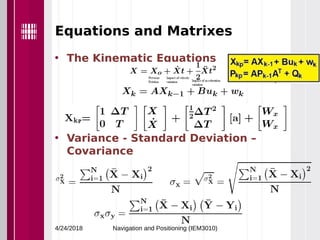
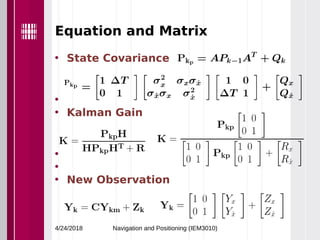
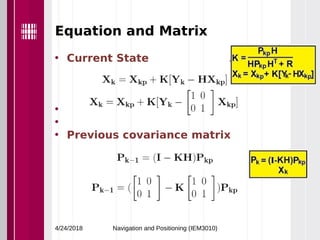
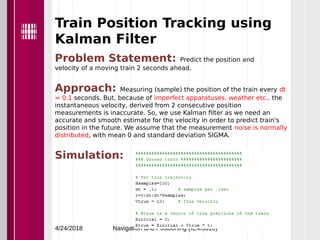

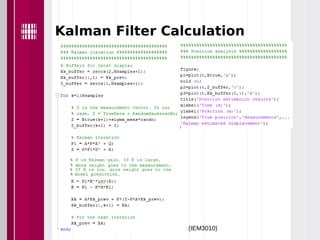
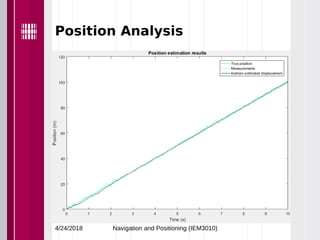

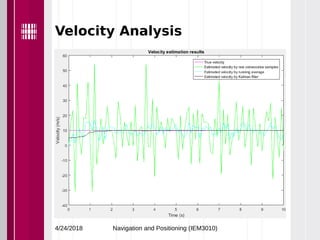

The document discusses the Kalman Filter and its applications in navigation and positioning, including an overview of its mathematical process and relevant equations. It specifically details its use in train position tracking, outlining the approach for accurate predictions despite measurement noise. Additionally, it highlights various other applications of the Kalman Filter in fields such as autopilots, weather forecasting, and computer vision.