Download as PDF, PPTX






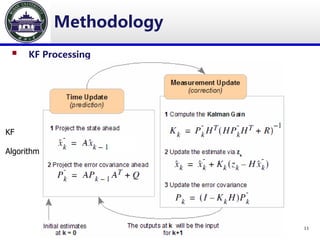




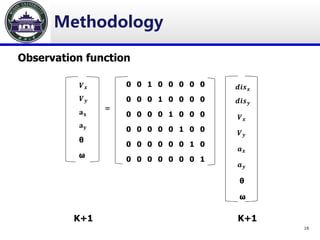

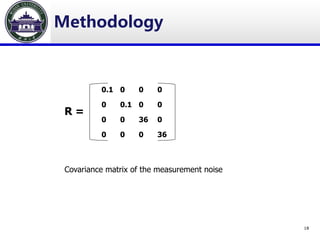


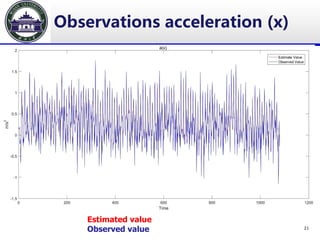
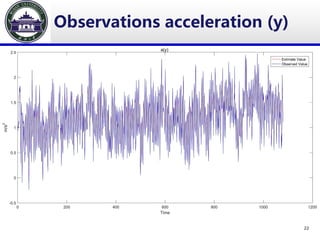



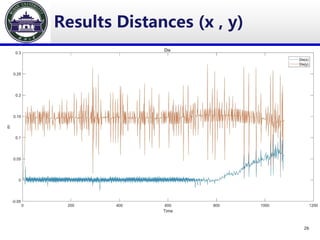







The document discusses the use of Kalman filters for position estimation, particularly utilizing smartphone sensors for indoor positioning applications. It emphasizes the importance of precise indoor location tracking, given that people spend most of their time indoors, and outlines the methodology for processing data from smartphones like the Huawei P10. The study concludes with potential improvements for accuracy and the importance of various calibration methods.















































