Download as PDF, PPTX








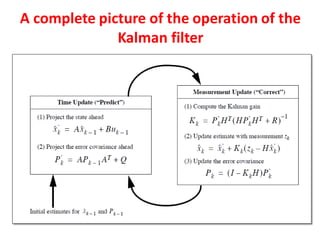
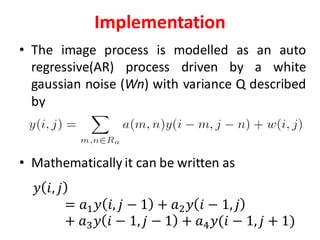
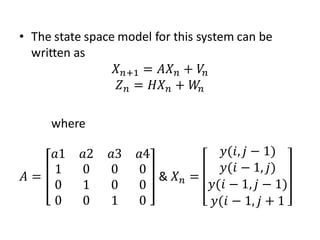




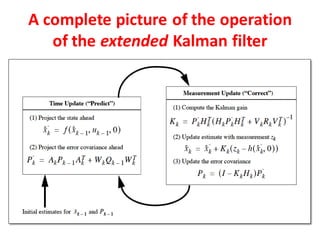






The document discusses the Kalman filter, an algorithm used to estimate the state of a linear dynamic system from a series of noisy measurements. It describes how the Kalman filter uses a predictor-corrector approach with time update and measurement update equations to estimate the true state. The filter is applied to image processing to reduce noise by modeling the image as an autoregressive process and using the Kalman filter estimates. Extensions to nonlinear and complex systems using the extended and complex Kalman filters are also covered.


























![Sensor Fusion Study - Ch13. Nonlinear Kalman Filtering [Ahn Min Sung]](https://cdn.slidesharecdn.com/ss_thumbnails/nonlinearkalmanfiltering200717-200815094232-thumbnail.jpg?width=640&height=640&fit=bounds)





































