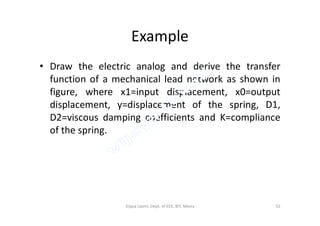
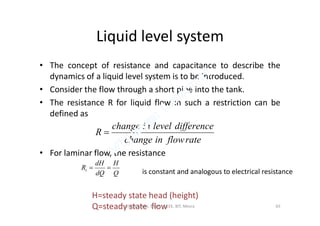
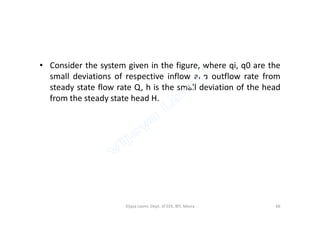
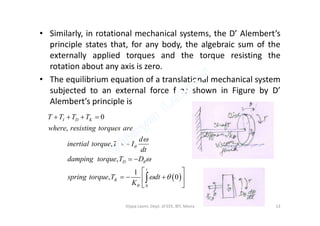
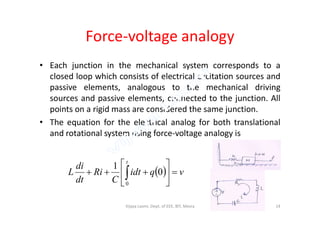
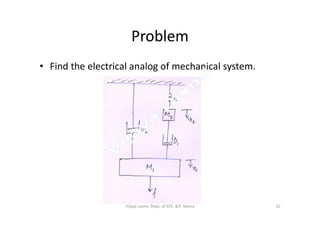
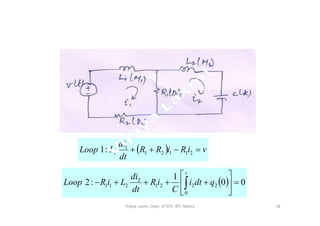
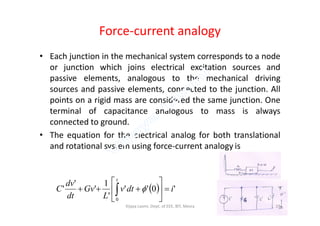
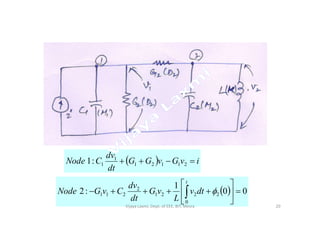
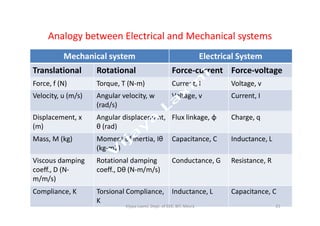
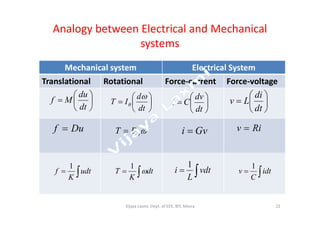
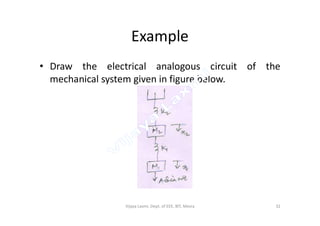
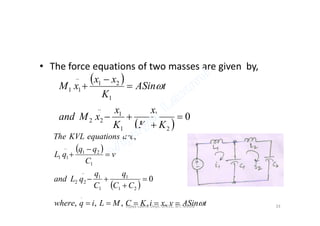
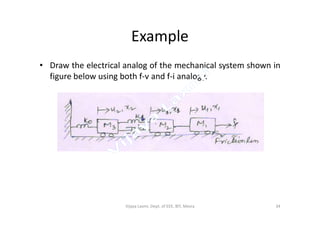
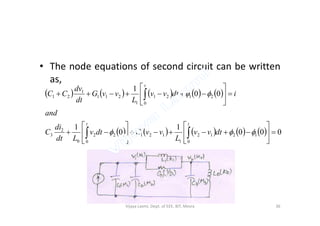
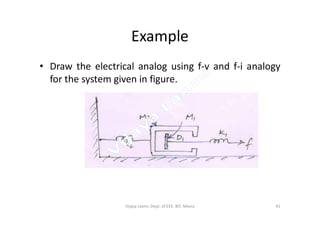
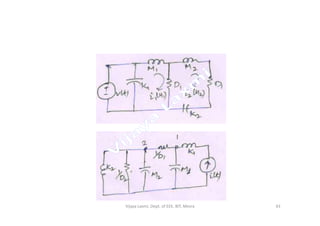
The document discusses analogous systems and provides examples of electrical-mechanical analogies. Analogous systems are physical systems that can be described by identical differential equations or transfer functions. An electrical system of resistors, capacitors and inductors may be analogous to a mechanical system of masses, dampers and springs. The equations for a translational mechanical system subjected to force are analogous to electrical circuit equations. Similarly, the equations for a rotational mechanical system subjected to torque are analogous to other electrical circuit equations. The document provides examples of modeling translational and rotational mechanical systems and their electrical analogies using either force-voltage or force-current analogies. Key components are mapped between the two domains.





![• For M1:
• For M2:
0200
2
00
12
uuDxxdtuuxxdtuu
du
M
tt
0200
2
2112
0
121
2
1
1
uuDxxdtuu
Kdt
du
M
t
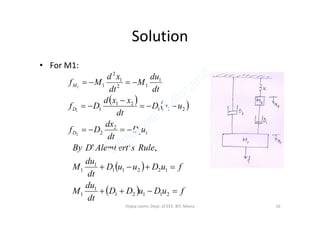
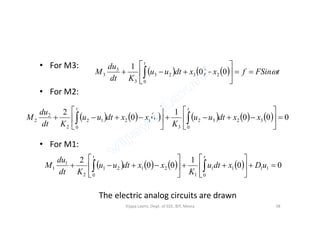
Force applied on M1 is zero, i.e., in f-v analog circuit, the first mesh
is shorted, v[f]=0. Only the mesh current i1[u1] is flowing in mesh 1.
• For M3:
000
1
0
2323
2
3
3
t
xxdtuu
Kdt
du
M
020000 1211
0
212
1
3
0
232
2
2
2
uuDxxdtuu
K
xxdtuu
Kdt
M
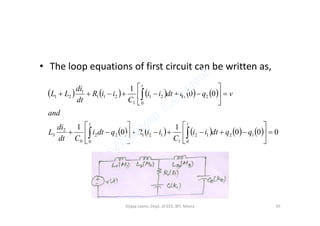
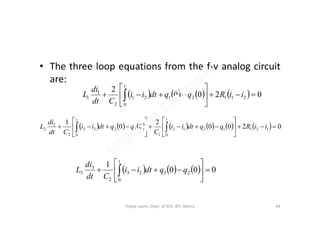
The electric analog circuits are drawn
42Vijaya Laxmi, Dept. of EEE, BIT, Mesra](https://image.slidesharecdn.com/istmodule2-190916053552/85/IST-module-2-42-320.jpg)

![• We may also write for M1,
][, 12
2
1
1
.
2
..
12
2
2
2
2
.
2
..
22
'
2
'
2
2
2
2
.
2
..
22
'
2
nxxas
K
x
xDxMn
K
x
xDxMnnffNow
K
x
xDxMf
22 KK
12
2
..
12
2
1
..
12
2
11 /
,
xMnxDnDxMnMf
equationfirstinPutting
52Vijaya Laxmi, Dept. of EEE, BIT, Mesra](https://image.slidesharecdn.com/istmodule2-190916053552/85/IST-module-2-52-320.jpg)