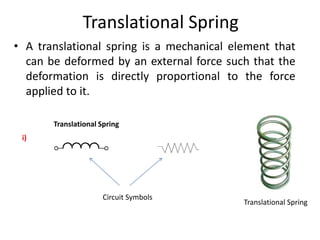
1. The document discusses basic elements of mechanical systems including translational springs, masses, and dampers as well as rotational springs, dampers, and moments of inertia. It provides the equations of motion for each element.
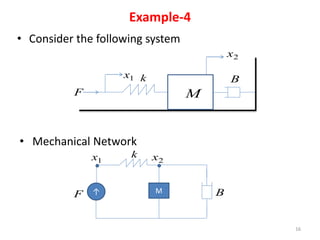
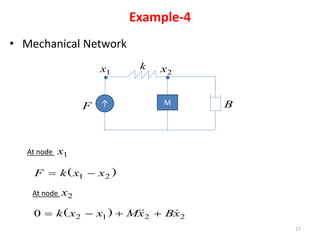
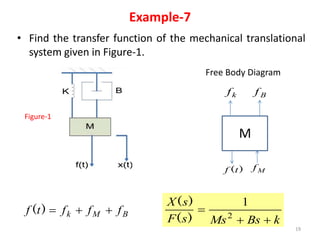
2. Examples are presented of mechanical systems modeled as combinations of springs, masses, and dampers. The differential equations of motion are developed and transfer functions derived for each example system.
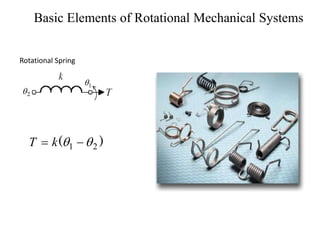
3. Rotational systems with springs, dampers, and moments of inertia are also modeled as examples. Circuit diagrams illustrate combinations of rotational elements and the corresponding differential equations are determined.