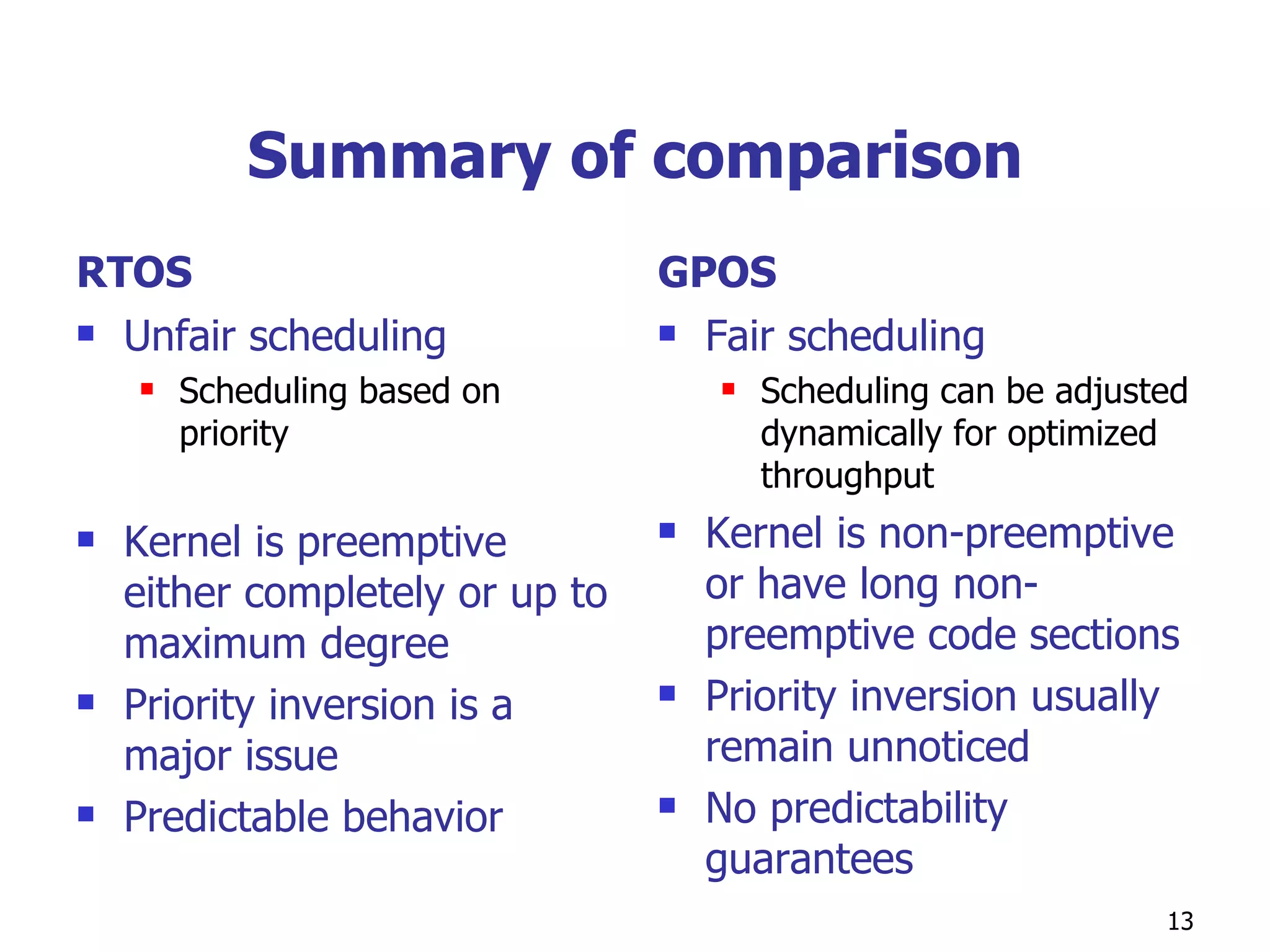
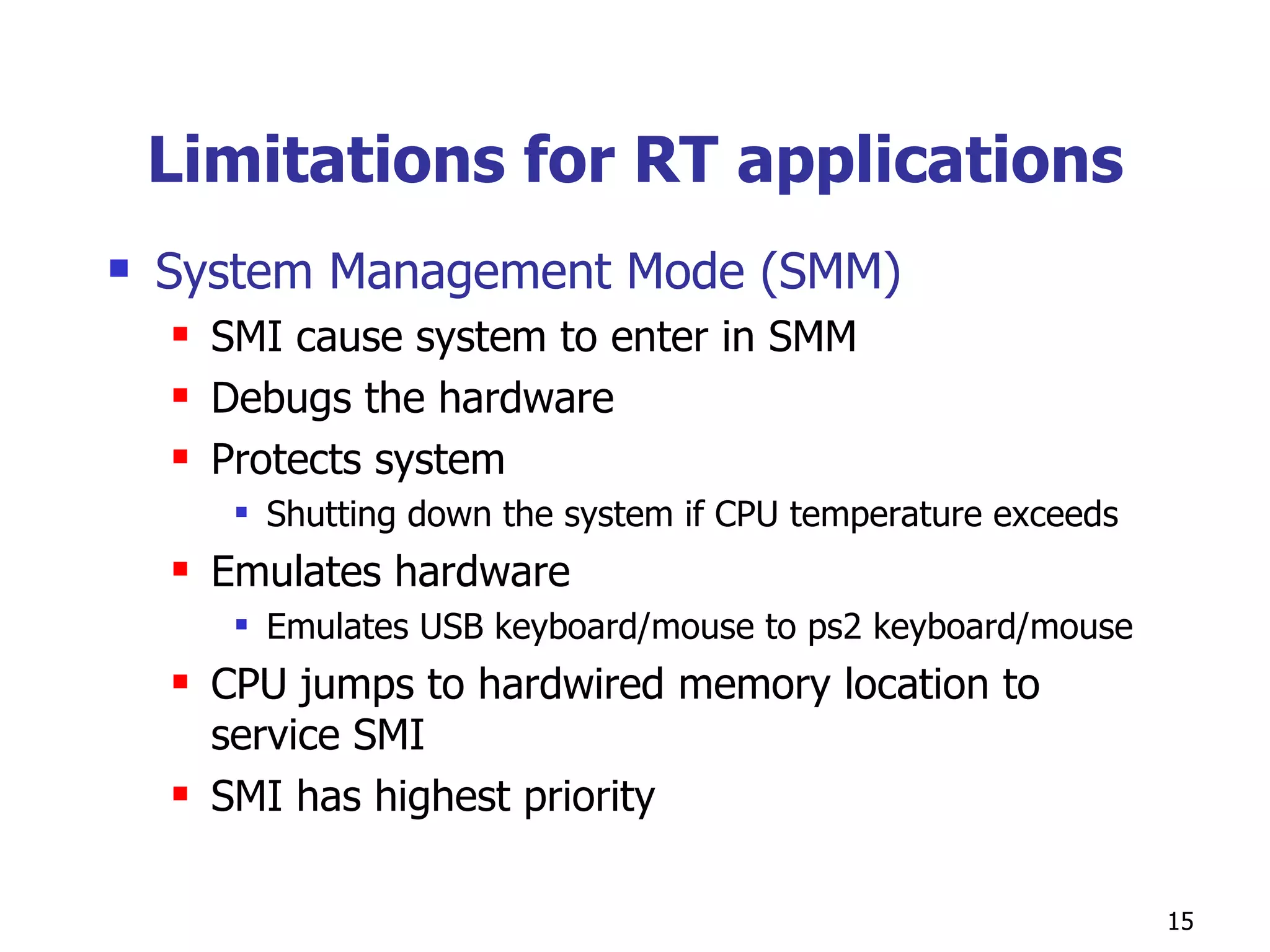
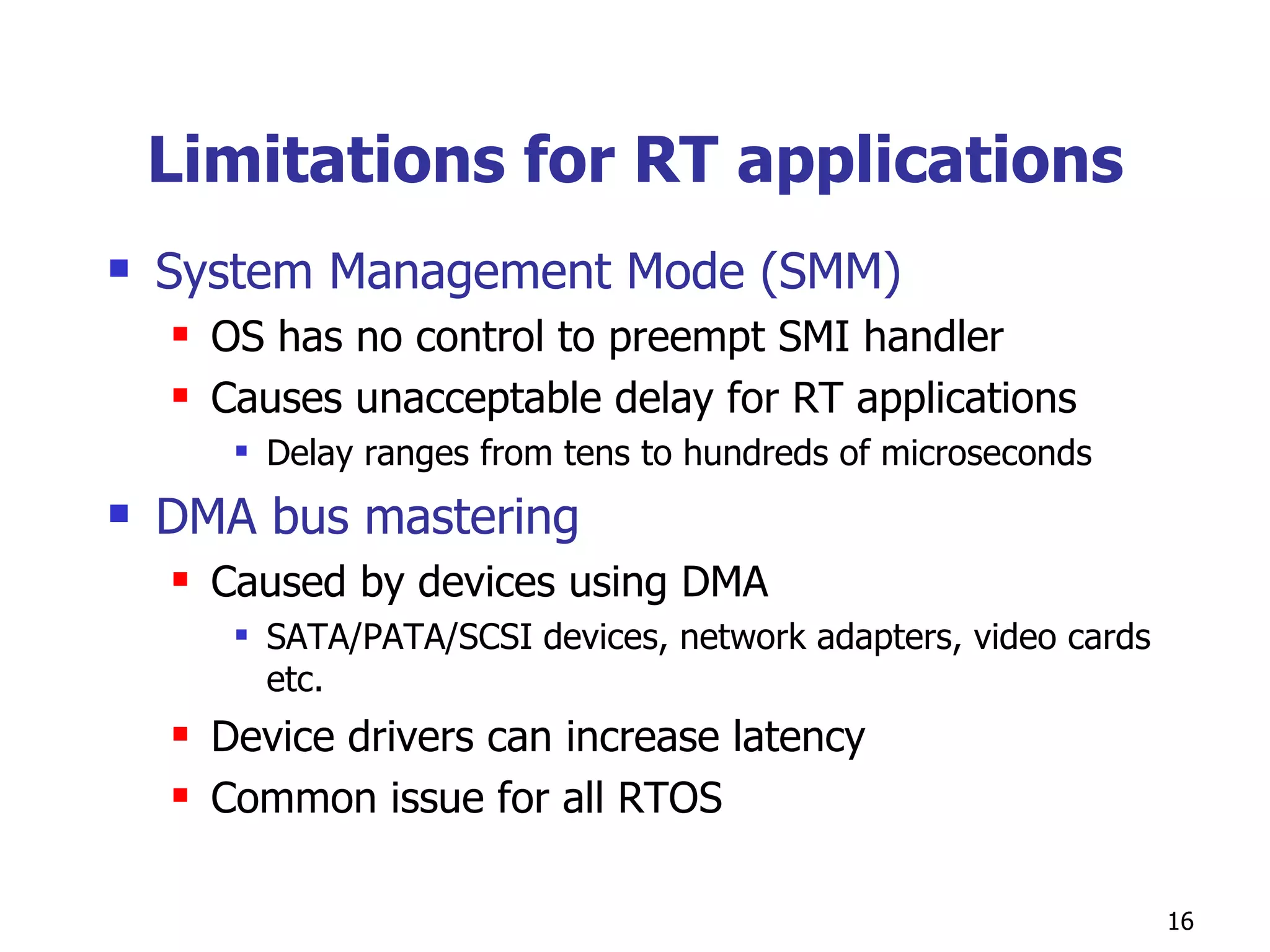
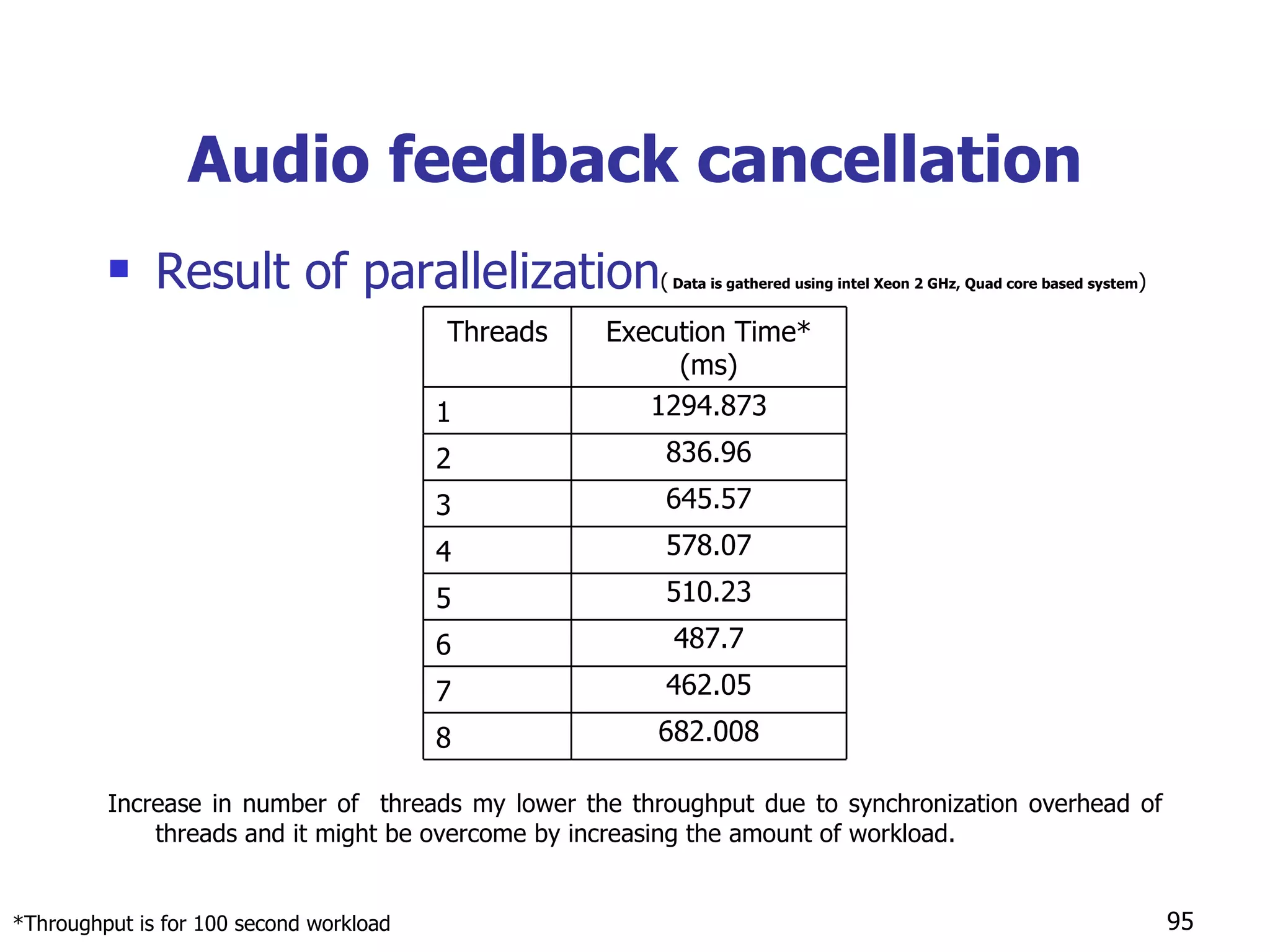
The document provides a comprehensive overview of real-time operating systems (RTOS), comparing them with general-purpose operating systems (GPOS), detailing the types, requirements, and conversion of the Linux kernel to support real-time operations. It covers key concepts such as scheduling policies, locking mechanisms, and handling of interrupts, while emphasizing the importance of meeting timing requirements in critical applications. Additionally, it discusses techniques to avoid common pitfalls, such as priority inversion and context switching limitations, and includes practical considerations for developing a real-time application like audio feedback cancellation.

























































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)













![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)

















