Downloaded 85 times

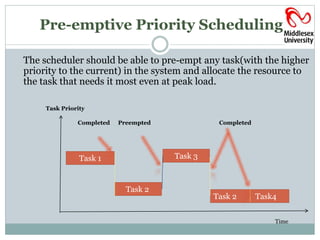

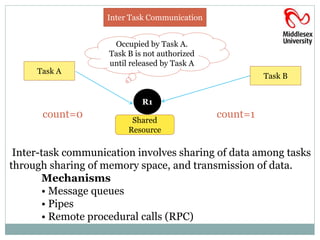

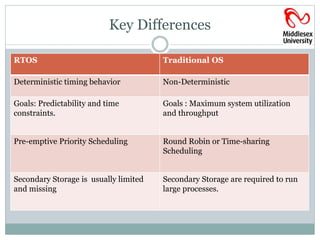
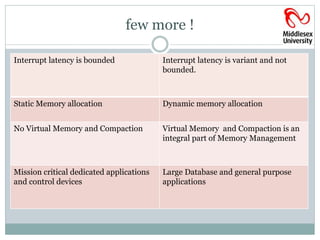


This document discusses real-time operating systems (RTOS). It begins by defining an RTOS and distinguishing it from traditional operating systems by its ability to respond to external events in a timely manner. It describes the different types of RTOS based on timing constraints. It then covers key RTOS concepts like preemptive priority scheduling, multitasking, inter-task communication, priority inheritance, and memory management. The document also discusses the Nucleus RTOS and whether RTOS will replace traditional operating systems.
























































![RTOS [Autosaved].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/rtosautosaved-230324171425-3bb3b10a-thumbnail.jpg?width=640&height=640&fit=bounds)


























