Downloaded 12 times


![void usart_task1()
{ while(1)
{
if(xSemaphoreTake( mutex, ( TickType_t ) 0 )
== pdTRUE )
{ usart1_puts("HOD of EXTC Department ");
xSemaphoreGive(mutex);
vTaskDelay(1000);
} } }
void usart_task2()
{ while(1)
{
if(xSemaphoreTake( mutex, ( TickType_t ) 0 )
== pdTRUE )
{
usart1_puts("Y . S . RAO Sir ");
xSemaphoreGive(mutex);
vTaskDelay(1000);
} }}
Calling Tasks inside main( ) :
int main(void)
{
RCC->AHBENR |= RCC_AHBENR_GPIOCEN;
// enable the clock to GPIOC
RCC->AHBENR |= RCC_AHBENR_GPIOAEN;
// enable the clock to GPIOA
// Put PORTC.8 in output mode
GPIOC->MODER |= (1 << 16);
// Put PORTC.9 in output mode
GPIOC->MODER |= (1 << 18);
// Put PORTA.0 in input mode
GPIOA->MODER &= ~(3 << 0);
usart1_init();
mutex = xSemaphoreCreateMutex();
xTaskCreate(usart_task1,
(const char *)"blinkyLed_task",
configMINIMAL_STACK_SIZE,
NULL, /* pvParameters */
tskIDLE_PRIORITY + 1, /* uxPriority */
NULL /* pvCreatedTask */);
xTaskCreate(usart_task1,
(const char *)"usart_task2",
configMINIMAL_STACK_SIZE,
NULL, /* pvParameters */
tskIDLE_PRIORITY + 2, /* uxPriority */
NULL /* pvCreatedTask */);
xTaskCreate(usart_task2,
(const char *)"usart_task3",
configMINIMAL_STACK_SIZE,
NULL, /* pvParameters */
tskIDLE_PRIORITY + 3, /* uxPriority */
NULL /* pvCreatedTask */);
vTaskStartScheduler();
while(1); }
RESULT
After successful compilation of program .hex file will be
generated. we used to connect the ARM board kit via
Universal serial bus for debugging purpose to see Blinking
LED.
For debugging purpose openOCD.bin file is used. it provides
Real time interfacing of ARM LPC2148X to the code i.e
RTOS.
Procedure to see the USART output on
Minicom screen:---
rajan@Rajan:~$ sudo minicom
Welcome to minicom 2.7
OPTIONS: I18n
Compiled on Jan 1 2014, 17:13:19.
Port /dev/ttySNX0, 19:59:10
Press CTRL-A Z for help on special keys
+-----[configuration]------+
| Filenames and paths |
| File transfer protocols |
| Serial port setup |
| Modem and dialing |
| Screen and keyboard |
| Save setup as dfl |
| Save setup as.. |
| Exit |
+--------------------------+
CTRL-A Z for help | 9600 8N1 | NOR | Minicom 2.7 | VT102 |
Offline | ttySNX0
After setting the serial usb port and Baud rate we will start
getting the output on the Minicom screen as shown below:--
If Tasks have equal priority then use of Semaphore is essential.
It is better shown in the output on Minicom window.
1. With Mutex (i.e Output device is locked for a single Task)
Task 1: Display the task1 output at USART1 ( Embedded GURU of
SPIT )
Task 2: Display the task2 output at USART2 ( Y . S . RAO Sir )
OUTPUT : HOD of EXTC Department Y . S . RAO Sir HOD of
EXTC Department Y . S . RAO Sir HOD of EXTC Department
Y . S . RAO Sir HOD of EXTC Department Y . S . RAO Sir
HOD of EXTC Department Y . S . RAO Sir HOD of EXTC
Department Y . S . RAO Sir .........
2. Without Mutex (i.e Output device is used Task)
OUTPUT : HOD of EXTC Department Y . S . RAO Sir HO Y .
D .S o. FRA EXO STC irDe HOpar D otm f EXenTCt S o. FRA
EXO STC irDe HOpar D otm f EXenTCt S o. FRA EXO STC
irDe HOpar D otm f EXenTCt S o. FRA EXO STC irDe HOpar
D otm f ExenTCt...........................
References:
1.Embedded/Real Time Systems : Concepts,Design
&Programming –Dr.K.V.K.K Prasad : Dreamtech Publs
2. Embedded & Real Time Systems Notes - Mr. Suman
Kalyan Oduri
3.www.freertos.org](https://image.slidesharecdn.com/rtosieee-151119165015-lva1-app6891/85/RTOS-implementation-3-320.jpg)


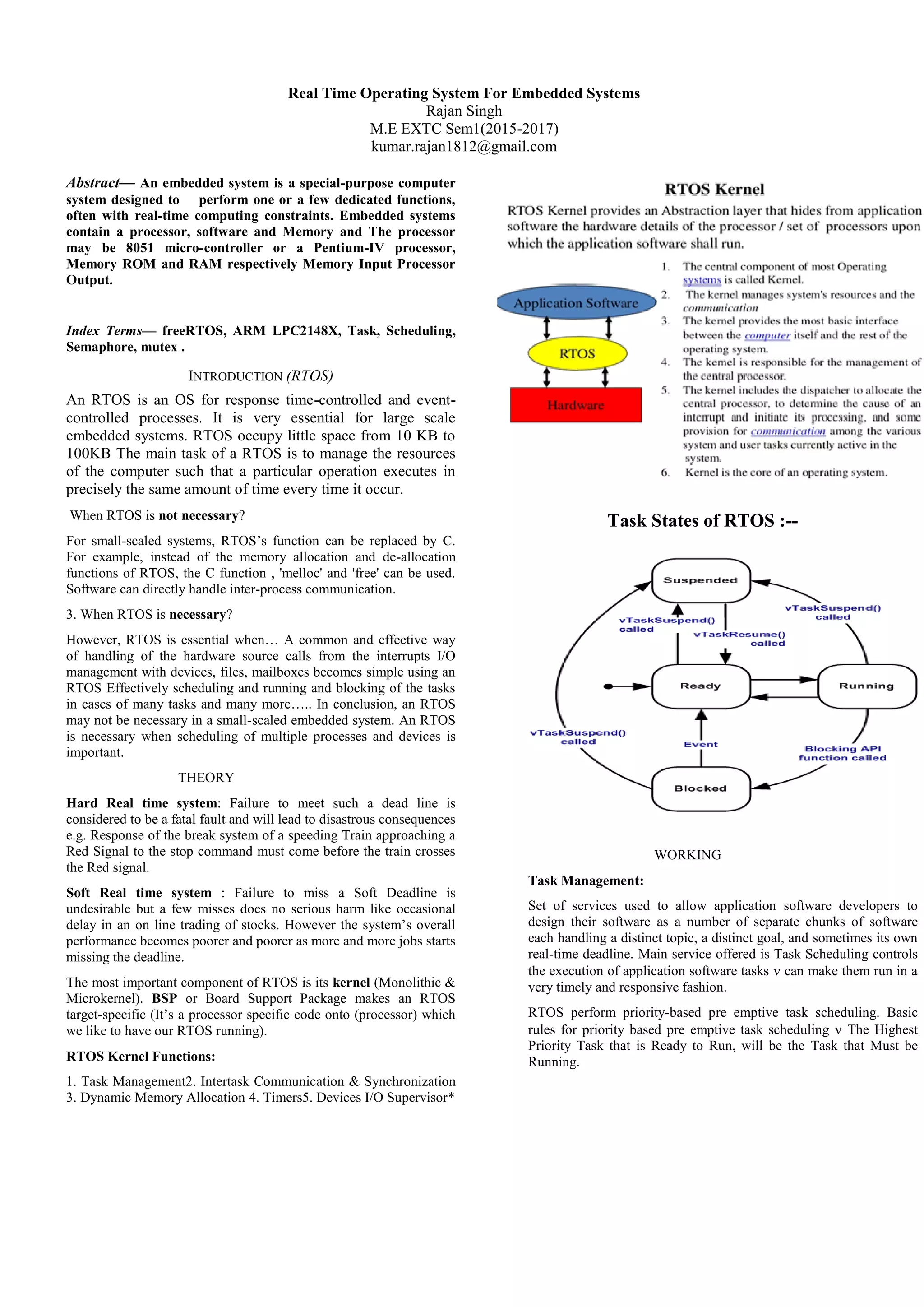
The document discusses real-time operating systems for embedded systems. It describes that RTOS are necessary for systems with scheduling of multiple processes and devices. An RTOS kernel manages tasks, inter-task communication, memory allocation, timers and I/O devices. The document provides examples of creating tasks to blink an LED and print to USART ports, using a semaphore for synchronization between tasks. The tasks are run and output is seen on a Minicom terminal.