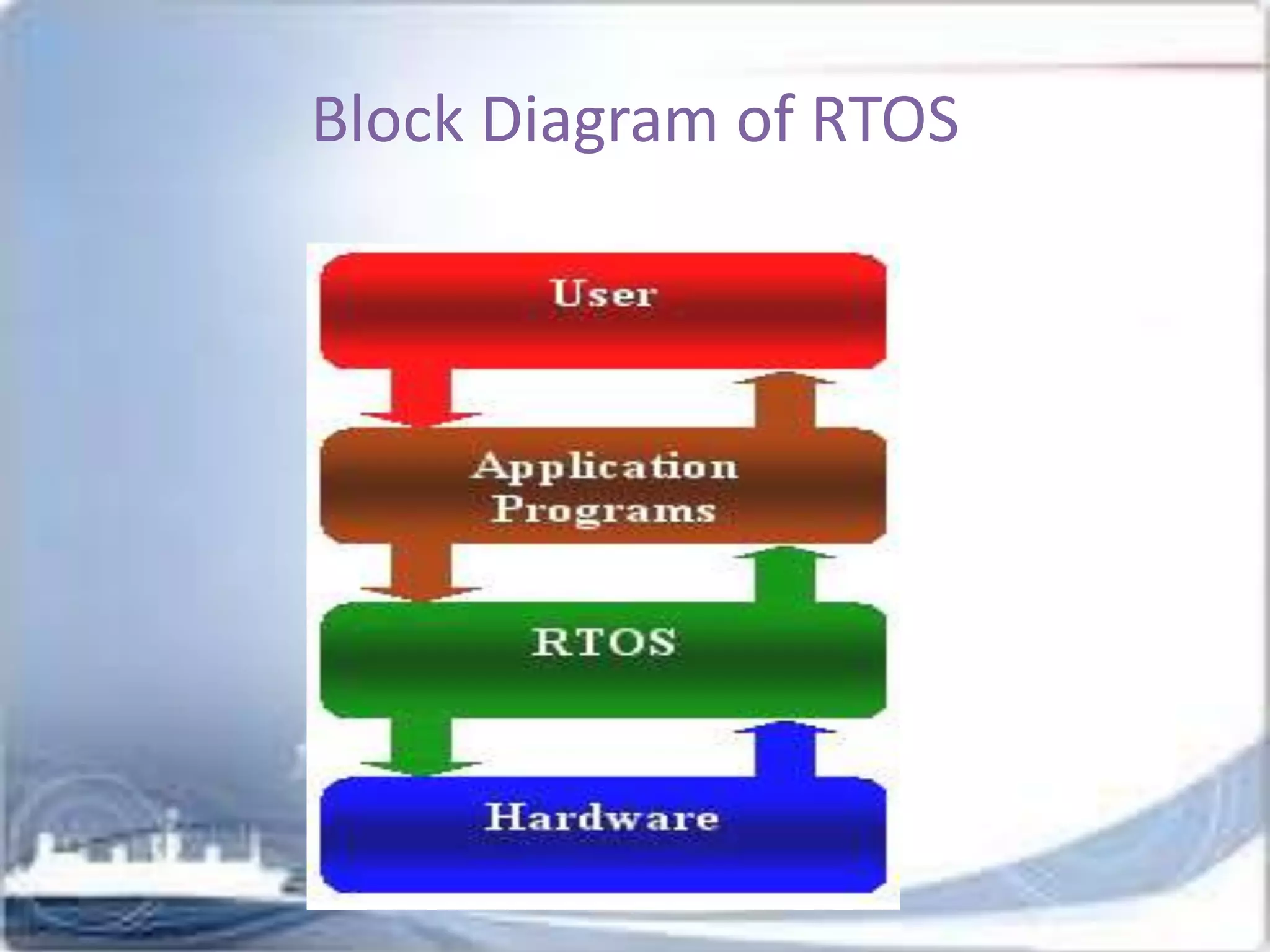
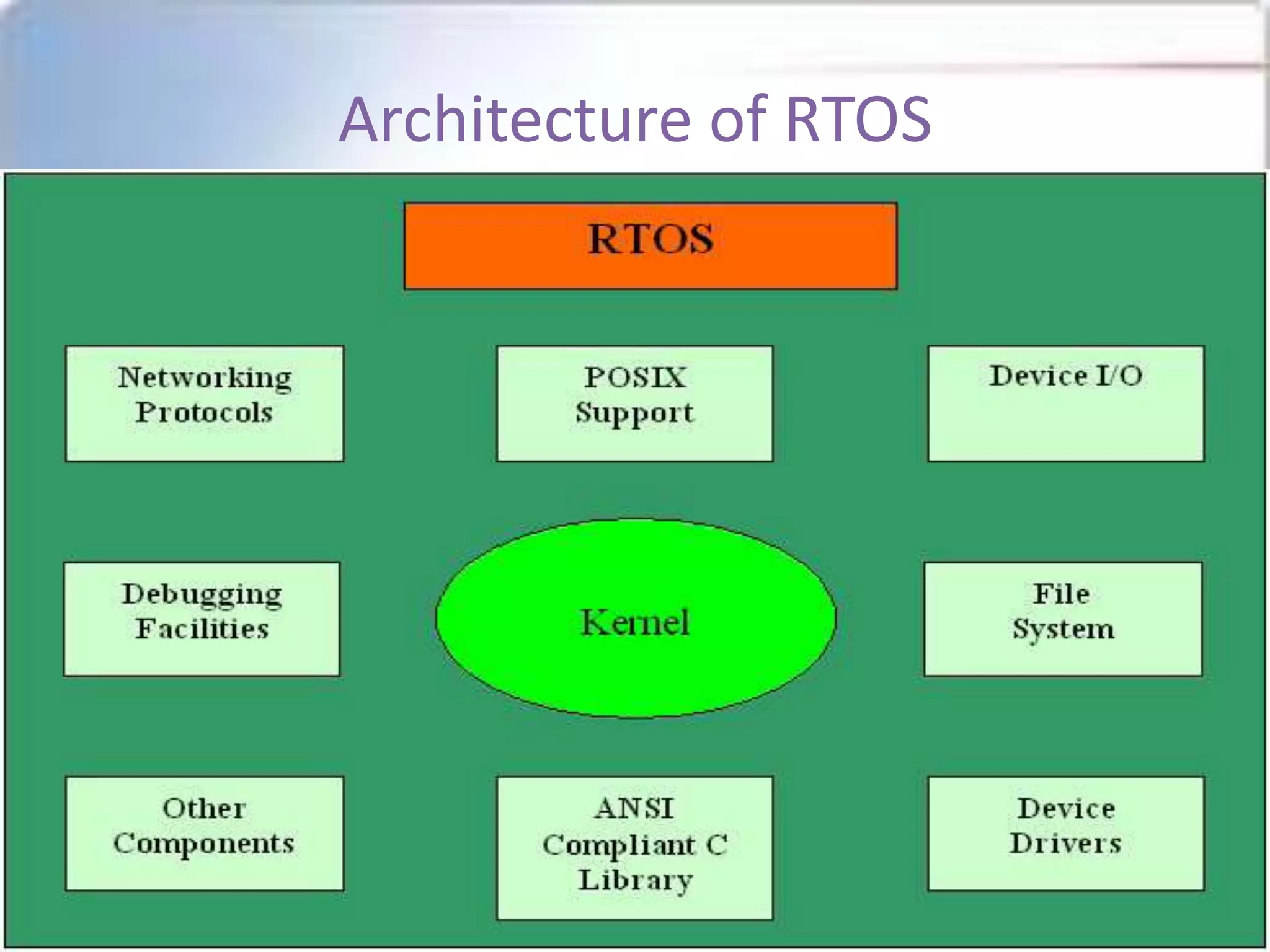
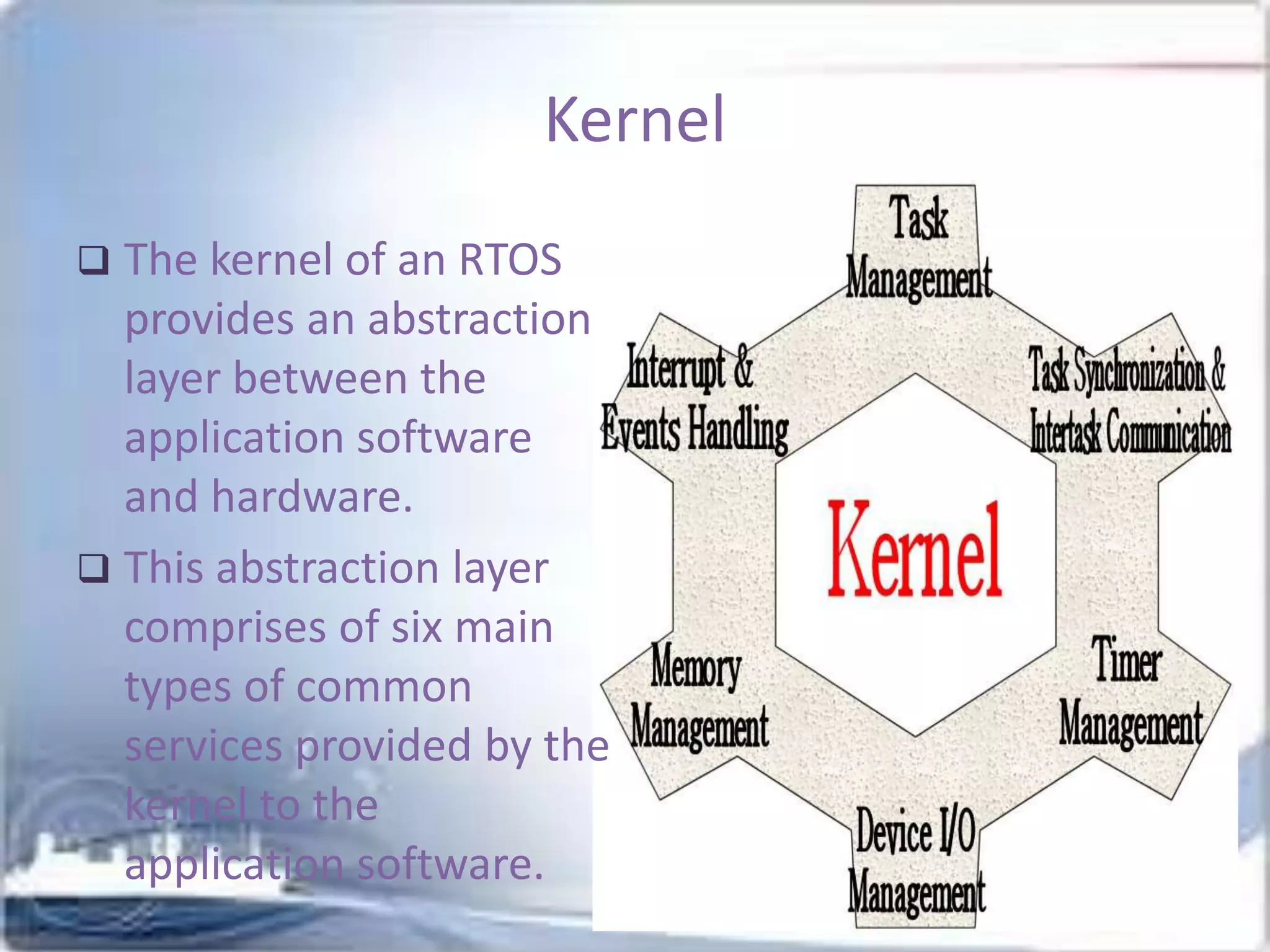
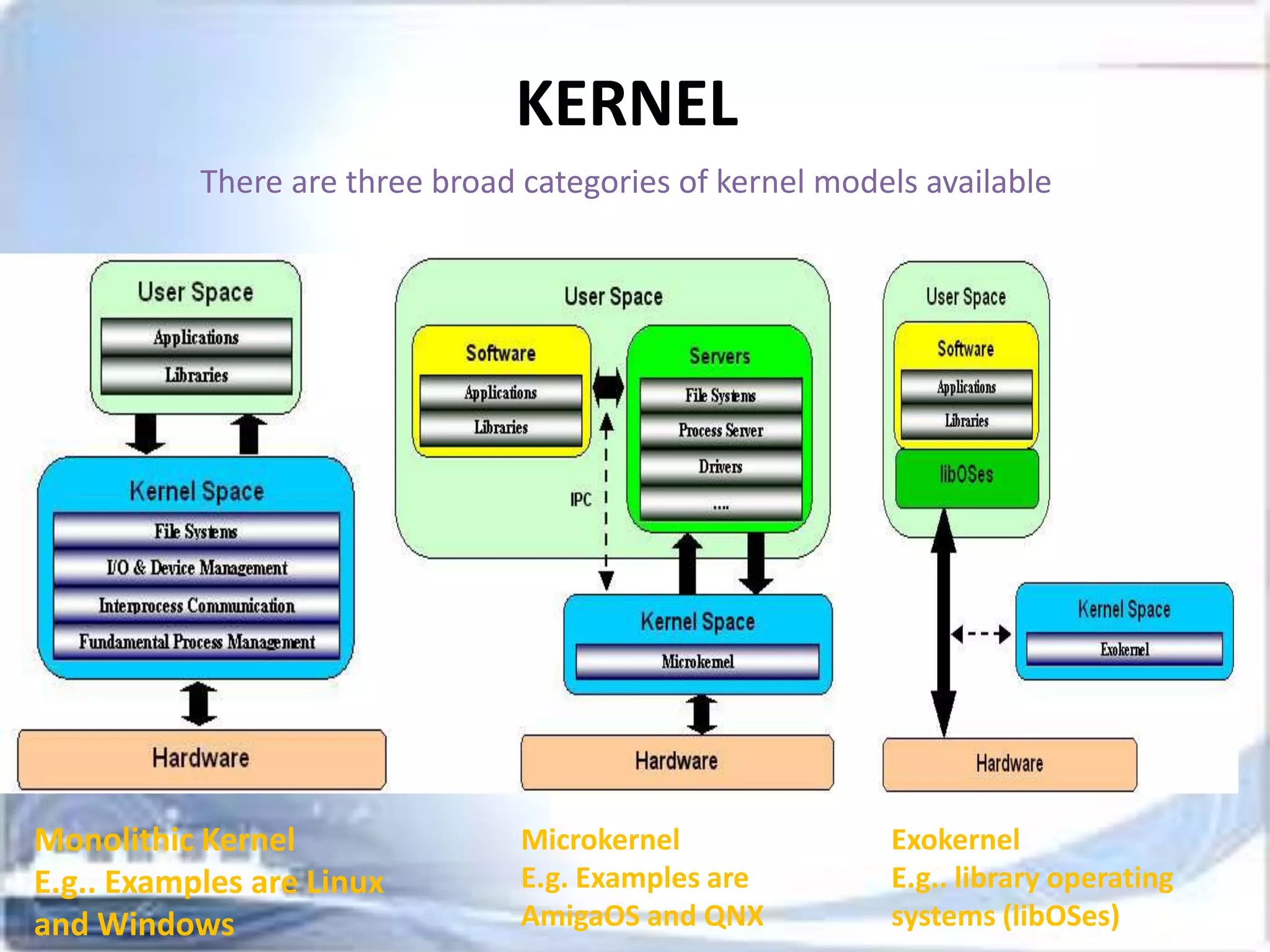
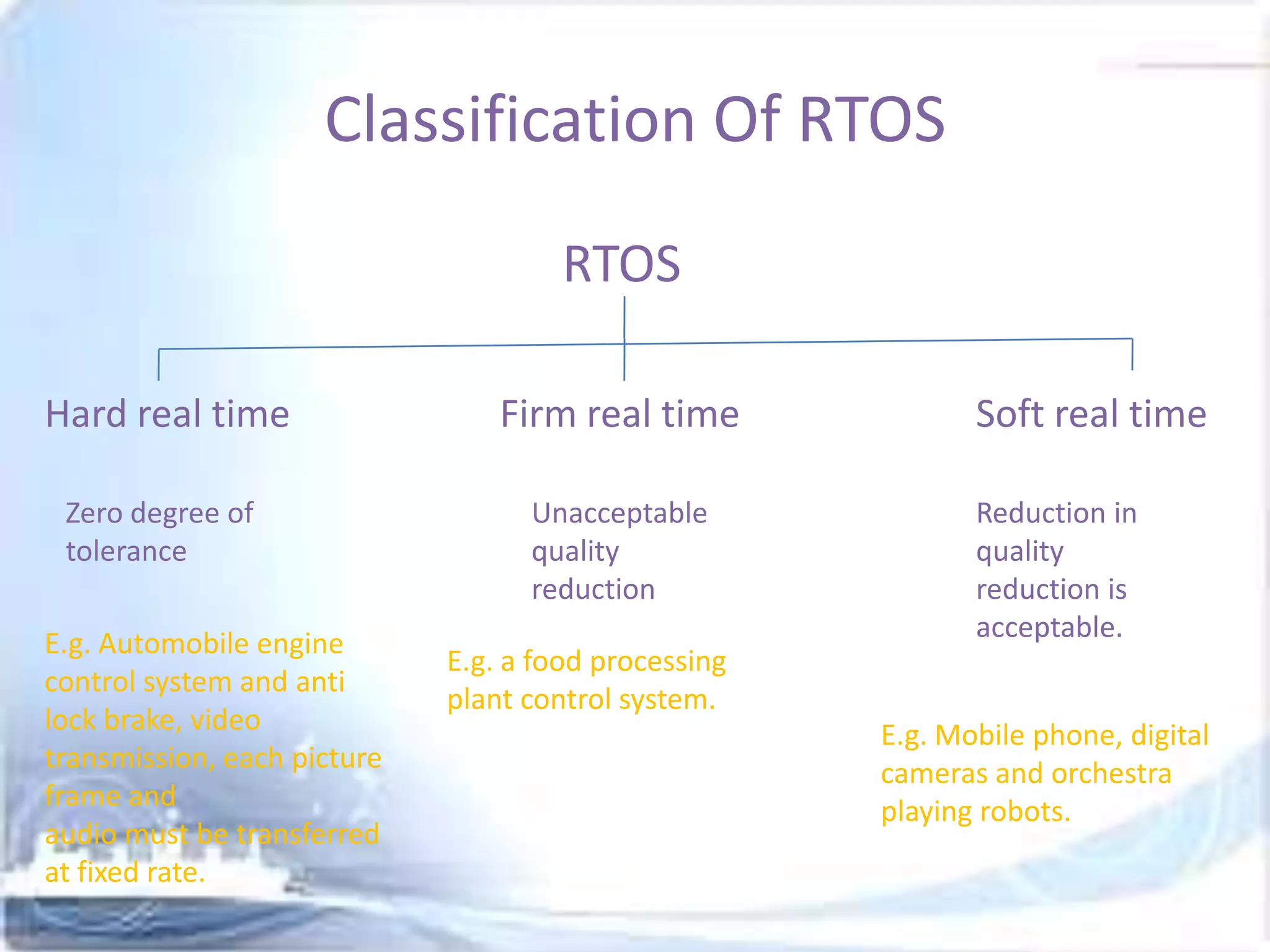
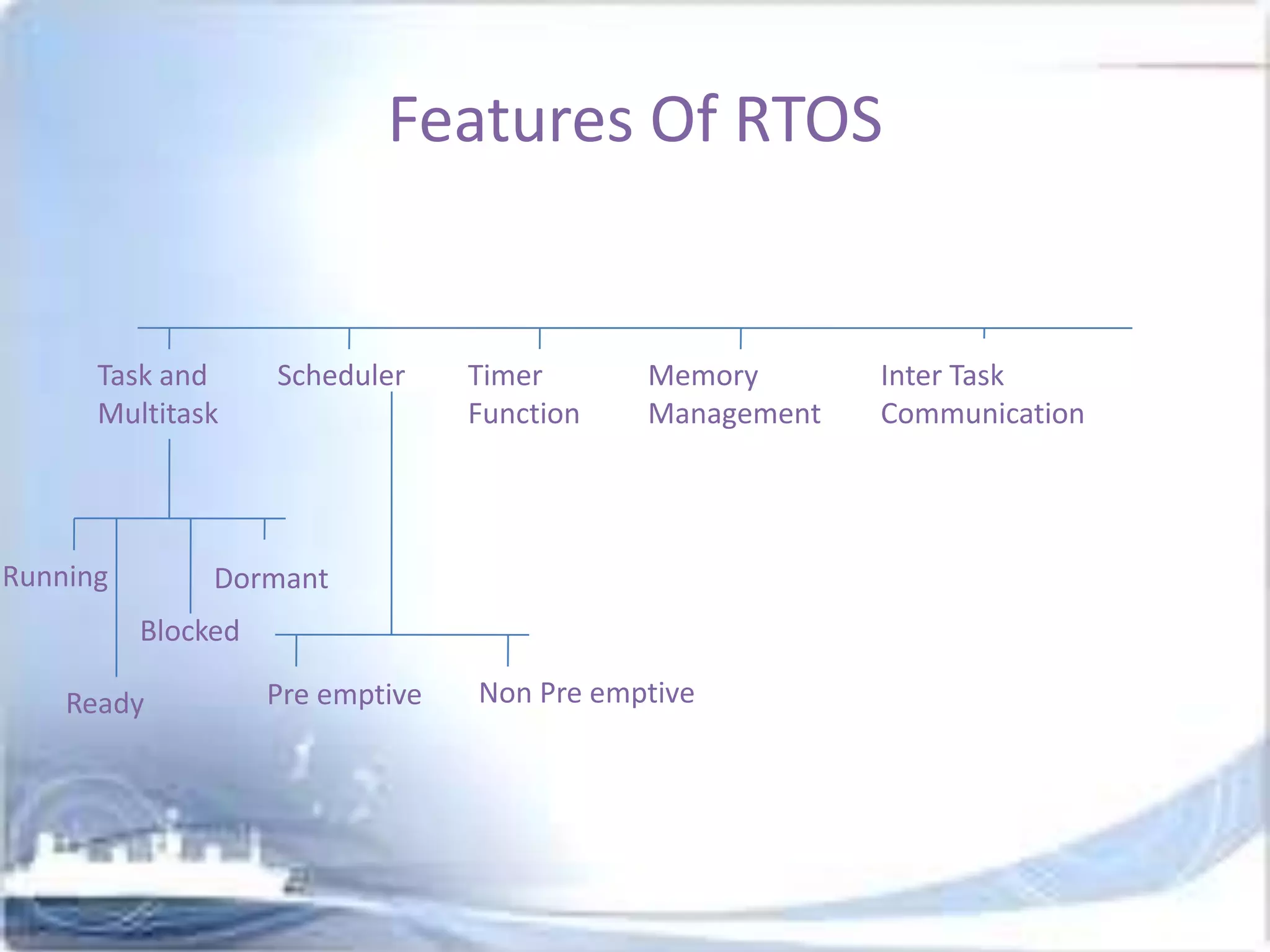
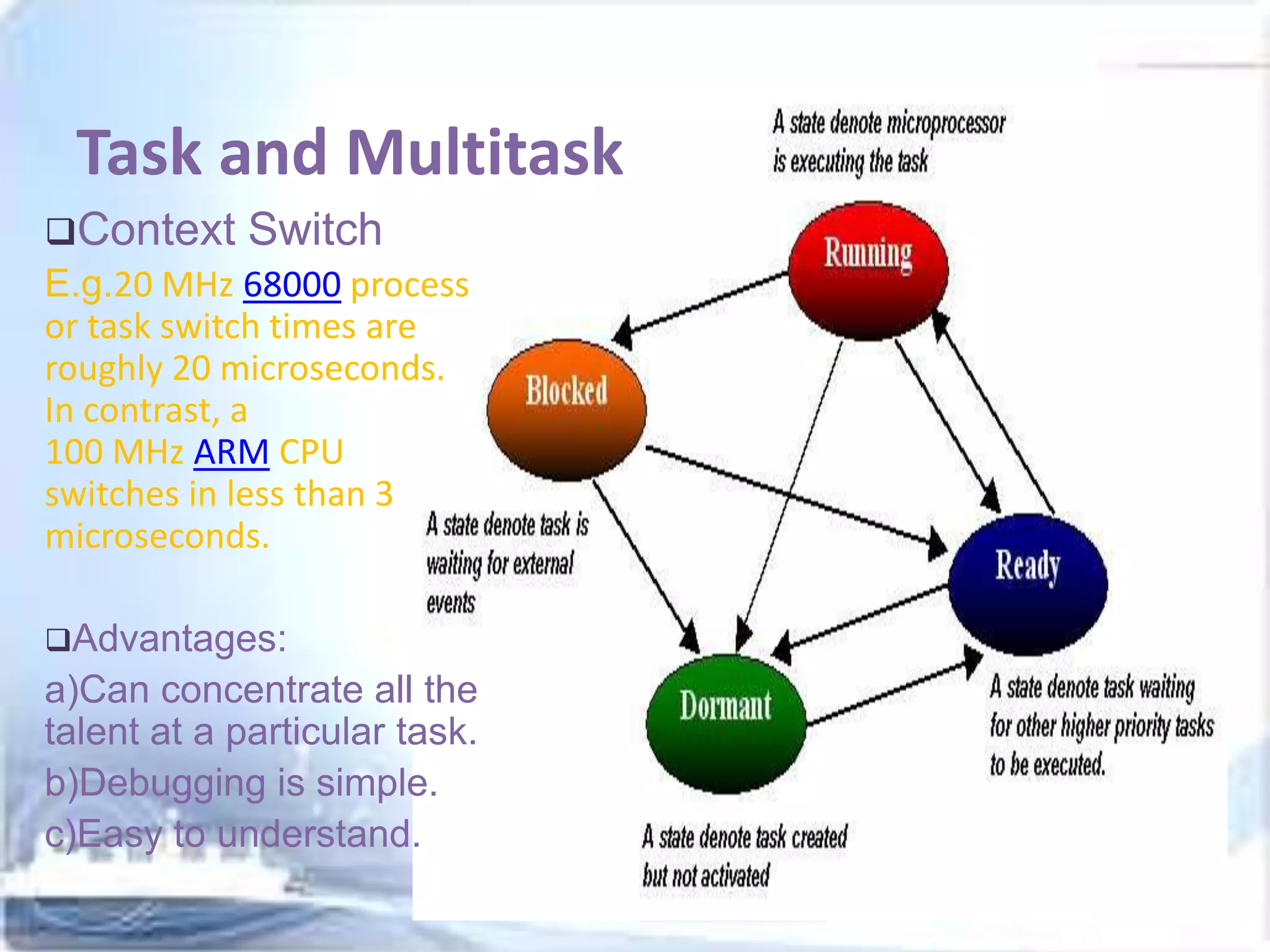
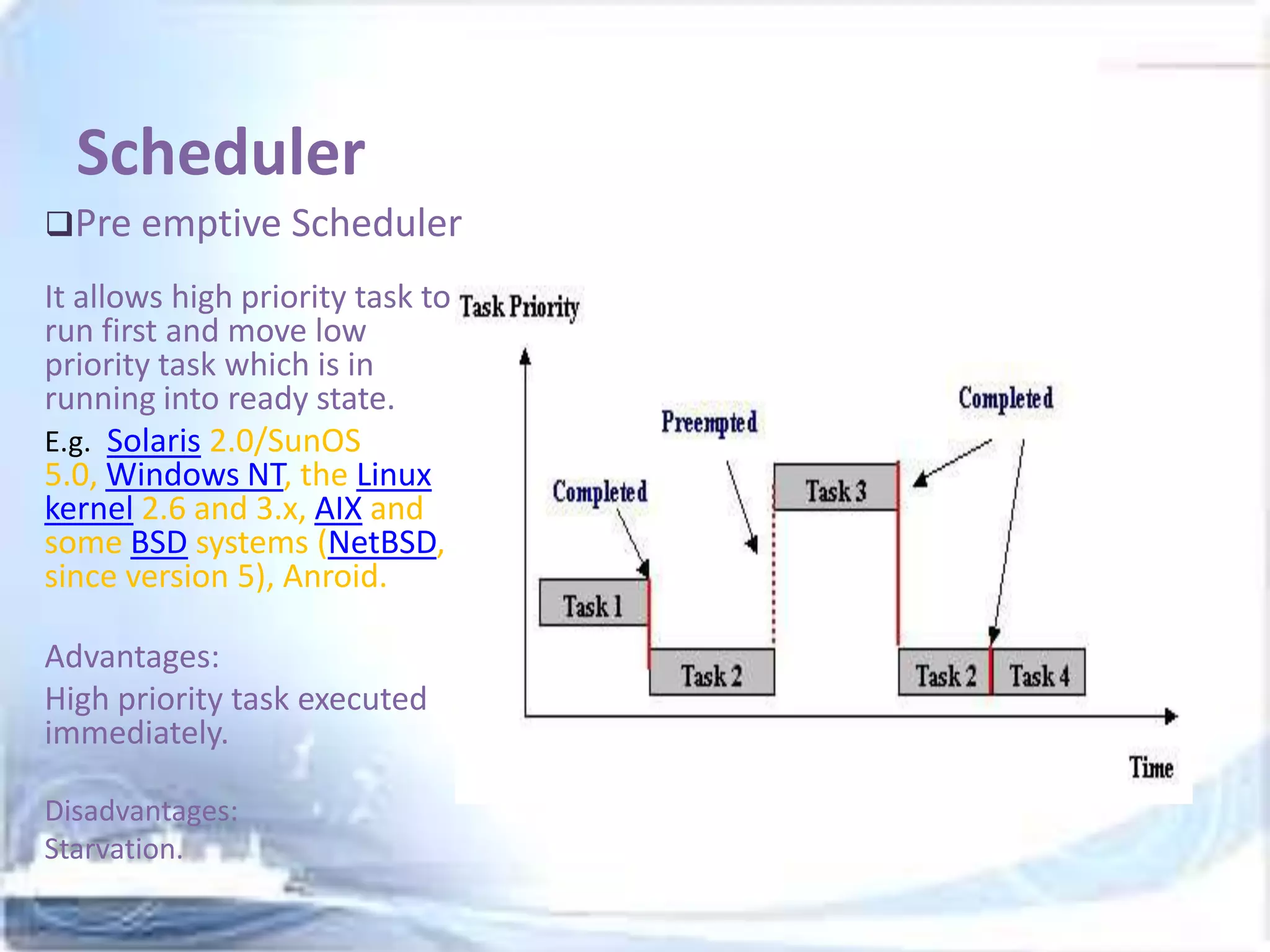
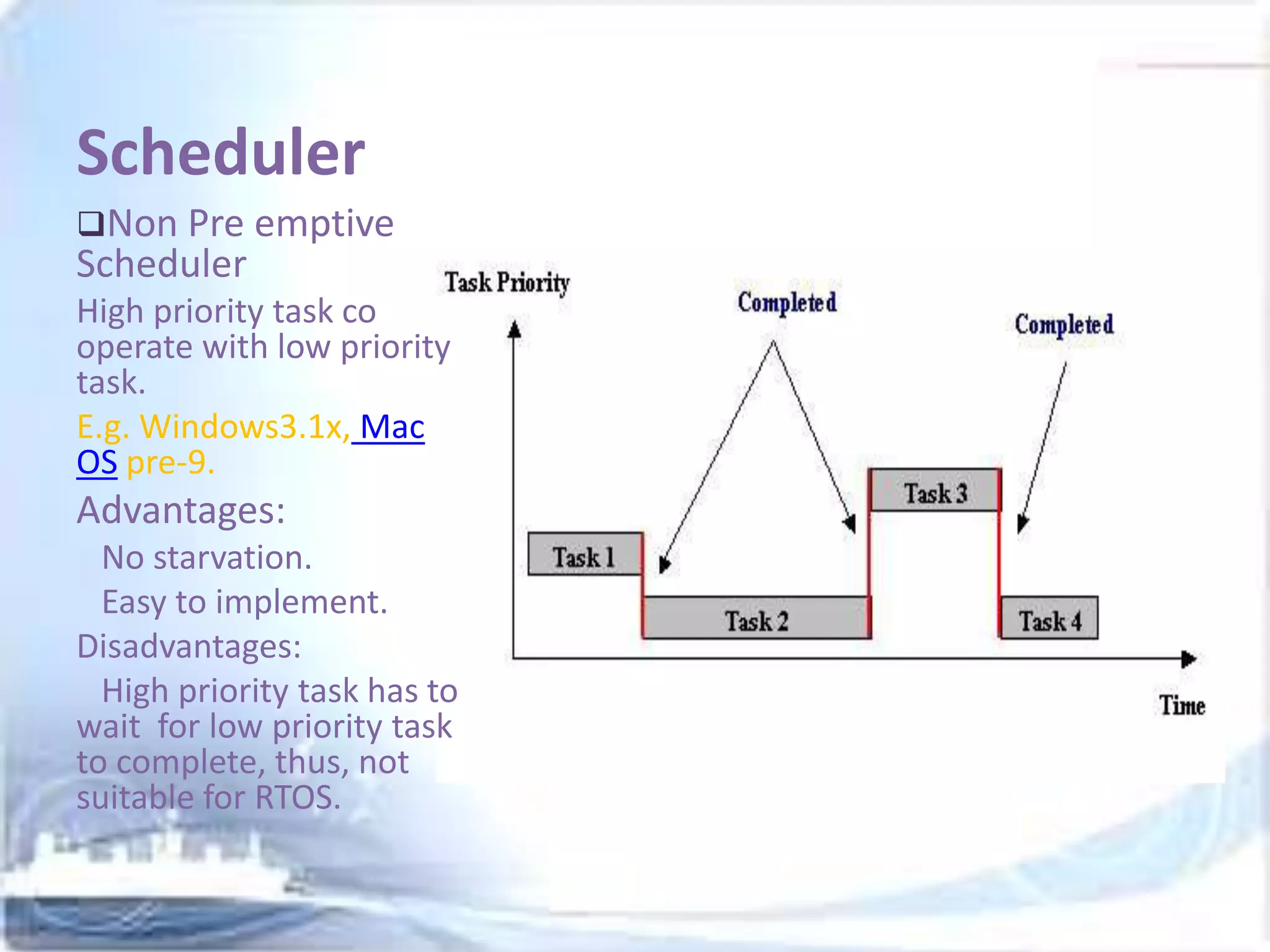
This document discusses real-time operating systems (RTOS). It defines an RTOS as a multitasking OS that meets time deadlines and functions in real-time constraints. The document outlines RTOS architecture, including the kernel that provides abstraction between software and hardware. It also discusses RTOS features like tasks, scheduling, timers, memory management, and inter-task communication methods. Examples of RTOS applications include medical devices, aircraft control systems, and automotive components.