Downloaded 84 times
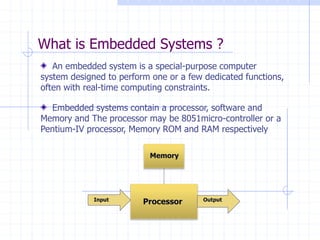






















This document discusses real-time operating systems for embedded systems. It begins by defining embedded systems as specialized computer systems designed to perform dedicated functions with real-time constraints. It then explains that real-time embedded systems must manage time-critical processes. Common real-time operating system (RTOS) functions include task management, inter-task communication, dynamic memory allocation, timers, and device I/O. RTOSs allow embedded systems to schedule tasks, communicate between processes, and interface with hardware in a timely manner. Examples of widely-used RTOSes are given.













































![Installing application in ubuntu [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/installingapplicationinubuntuautosaved-150904044920-lva1-app6892-thumbnail.jpg?width=640&height=640&fit=bounds)