Downloaded 369 times
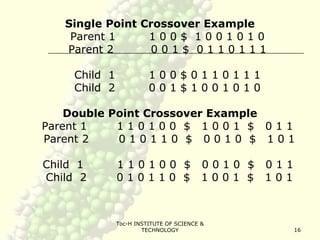
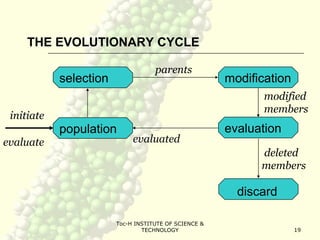
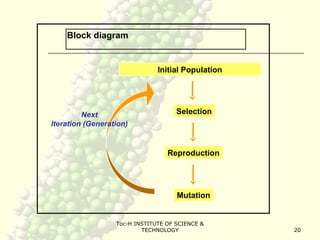
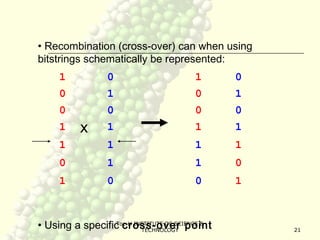
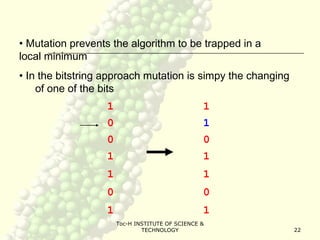

Genetic algorithms (GA) are a class of optimization algorithms inspired by biological evolution. GAs use concepts like natural selection and genetic inheritance to evolve solutions to problems by iteratively selecting better solutions. A GA encodes potential solutions as strings called chromosomes and uses genetic operators like crossover and mutation to generate new solutions, evaluating them to select the fittest ones. This process is repeated until a termination condition is reached, such as a solution meeting criteria or a fixed number of generations. GAs are well-suited for complex problems where little is known about the search space.