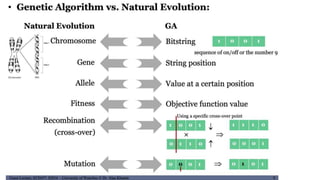
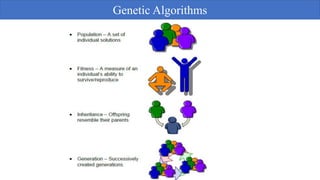
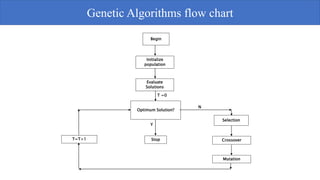
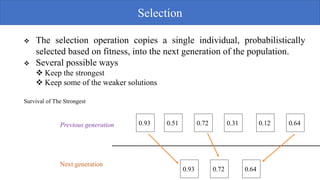
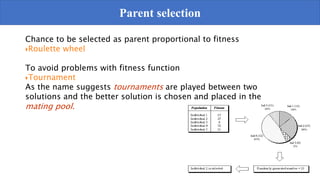
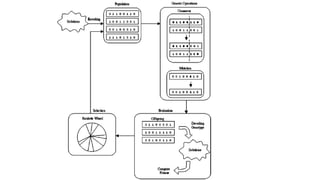
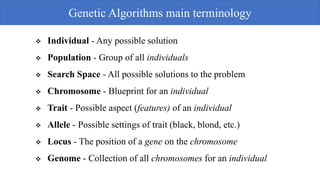
Genetic algorithms are a probabilistic search algorithm that iteratively transforms a population of potential solutions into a new generation using Darwinian principles of natural selection and genetic operations like crossover and mutation. John Holland developed the original genetic algorithm in the 1970s using binary representations, selection proportional to fitness, and crossover and mutation to produce new individuals. Genetic algorithms represent potential solutions as strings and evolve the population through generations to arrive at an optimal solution.