Downloaded 41 times
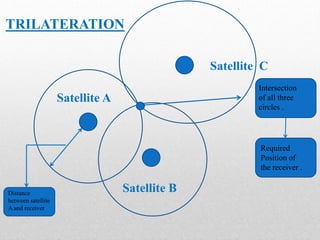
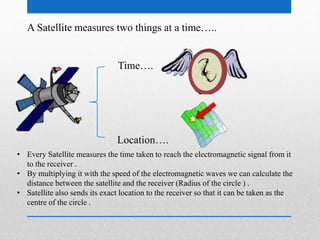
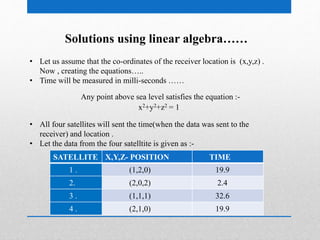

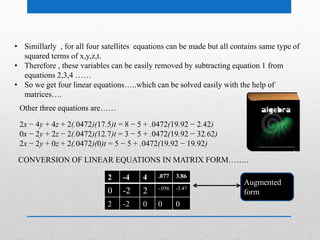
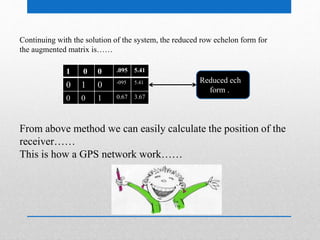

This document summarizes how GPS systems use linear algebra to determine location. It explains that GPS uses at least 3 satellites to triangulate a receiver's position via trilateration. The satellites transmit their location and arrival time. This creates a system of equations relating distance from each satellite equal to the difference between signal transmission and receipt times. Linear algebra is then used to solve the system of equations, determining the receiver's x, y, z coordinates. The process involves constructing matrices from the satellite data and time differences, then reducing them to their row echelon form to solve for position.













![Introduction to gps [compatibility mode]](https://cdn.slidesharecdn.com/ss_thumbnails/introductiontogpscompatibilitymode-131231040925-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)








































![GPS [ Global Positioning System ]](https://cdn.slidesharecdn.com/ss_thumbnails/finalgps-termpaper-141116110156-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)
![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)
































