Downloaded 24 times



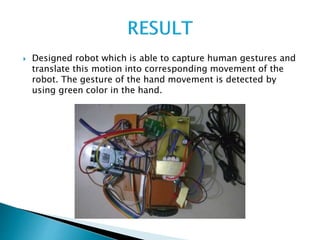


This document presents a project on designing a system to identify human gestures to control a robot. The system uses a camera to capture gestures marked by a green ball in the hand. MATLAB analyzes the frames to detect the gesture and sends signals to a CPLD chip connected to a motor driver and gear motor. The motor moves the robot in the direction indicated by the detected gesture. Challenges included image and background noise. Potential applications are sign language recognition and alternative computer interfaces using gestures.