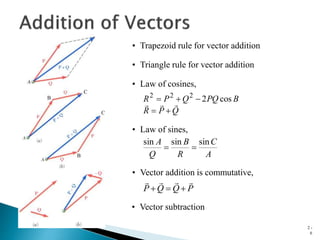
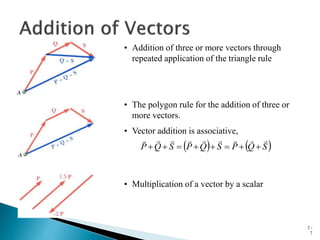
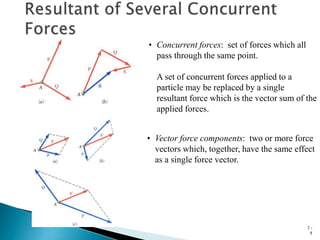
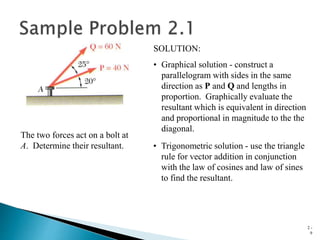
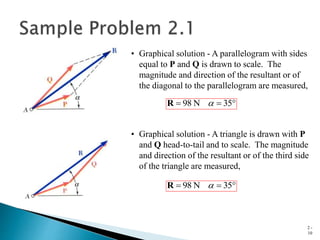
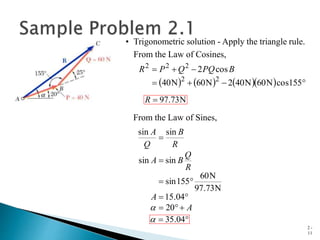
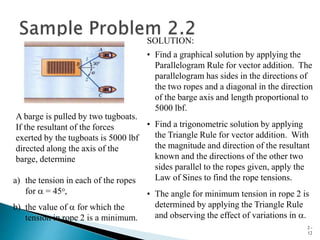
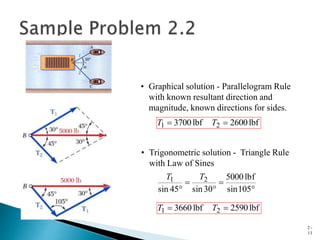
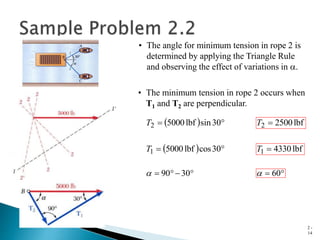
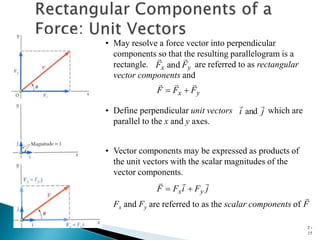
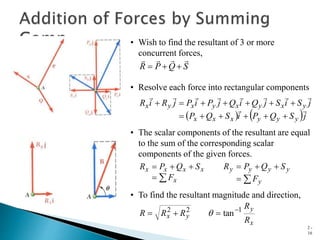
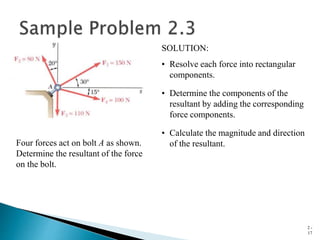
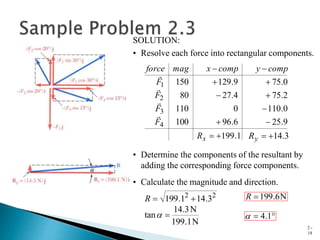
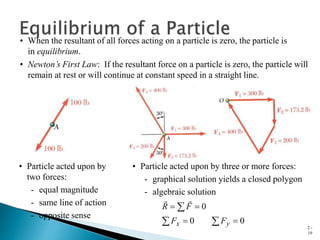
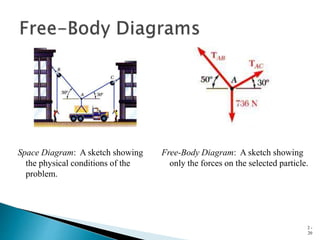
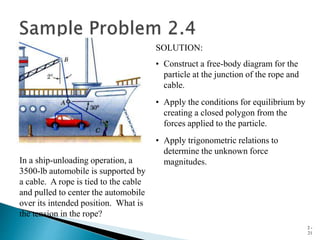
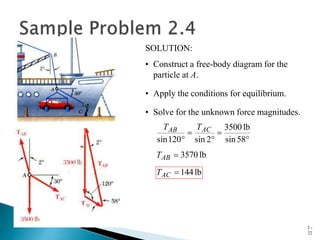
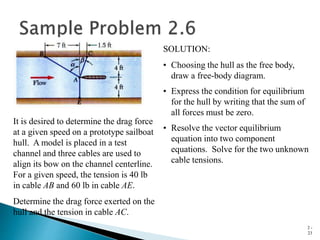
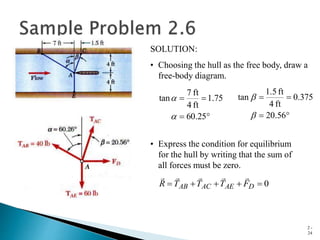
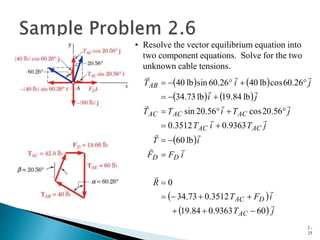
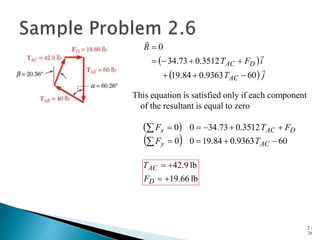
The document discusses force vectors and their addition. It defines vectors, scalar quantities, and describes how to add forces using graphical and trigonometric methods. Rectangular components of forces are introduced. Equilibrium conditions for particles and systems are explained using free body diagrams. Sample problems demonstrate applying concepts to determine resultant forces and tensions in systems with multiple concurrent forces.