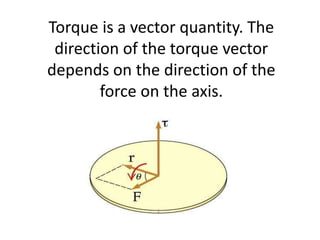
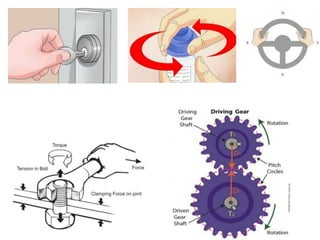
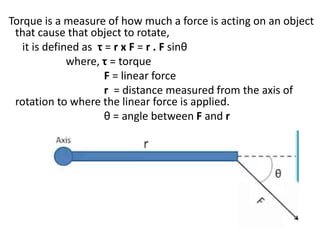
Torque is a vector quantity that measures the force causing an object to rotate around an axis, with applications in everyday life such as turning a doorknob or using a wrench. It can be classified as static, which does not produce angular acceleration, or dynamic, which does, and is mathematically expressed as τ = r x f = r . f sinθ. The net torque acting on an object is crucial for understanding rotational equilibrium, where individual torques cancel each other out.
![-> In the formula of the torque τ = r . F sinθ
In the equation , sinθ has no units , r has unit of
meters (m) and F has units of Newton(N) .
Combining these together the unit of torque is a
Newton-meter ( Nm).
-> The Dimensional formula for τ = [ M L2 T-2 ]
-> If the force vector θ = 0° or 180° the force will
not cause any rotation on the axis . The value of
torque for both this cases is zero.
-> The most effective force vectors to produce
torque are θ = 90° or -90°, which are
perpendicular to the position vector.](https://image.slidesharecdn.com/torque1-180415154518/85/Torque-10-320.jpg)