Downloaded 33 times



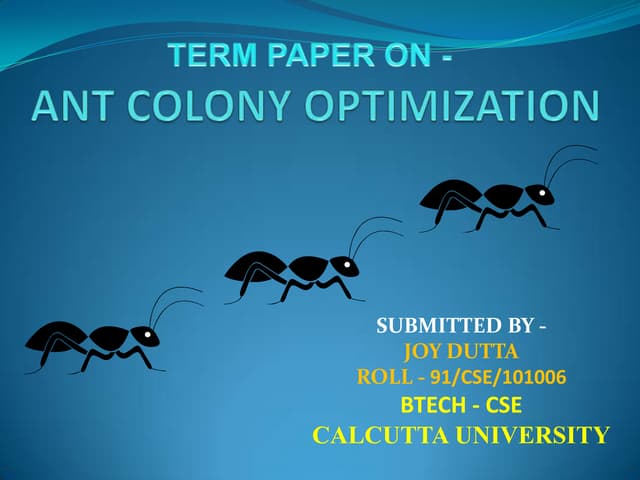
![Scientific approach
Double Bridge Experiment by Jean-
Louis Deneubourg [BDG93]
He concluded that ants chooses the shortest path](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-6-320.jpg)
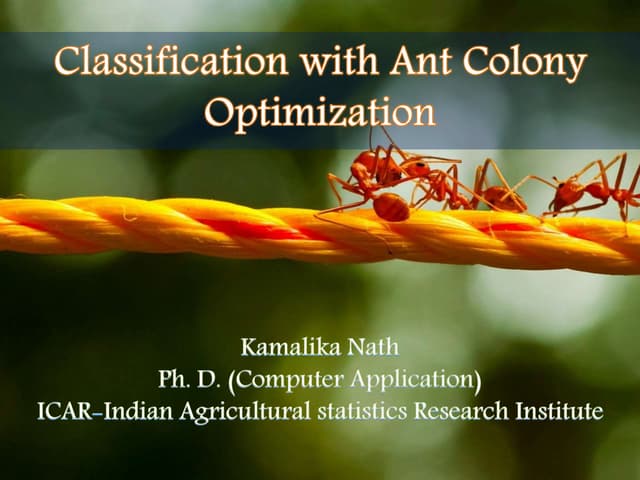
![Mathematical modeling of
Ants’ "technique"
The probability of ant choosing the short
branch
𝑃𝑖𝑠(𝑡) =
(𝑡𝑠+ɸ𝑖𝑠(𝑡) 𝜶
(𝑡𝑠+ɸ𝑖𝑠(𝑡) 𝜶+ (𝑡𝑠+ɸ𝑖𝑙(𝑡) 𝜶
𝑡𝑠- Time to travel the shortest branch
ɸ𝑖𝑎- function of pheromone used until
time t where a ∈(s,l)
𝜶 –Derived from Monte Carlo simulations
and the best suited value was 2 [DS04]](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-8-320.jpg)


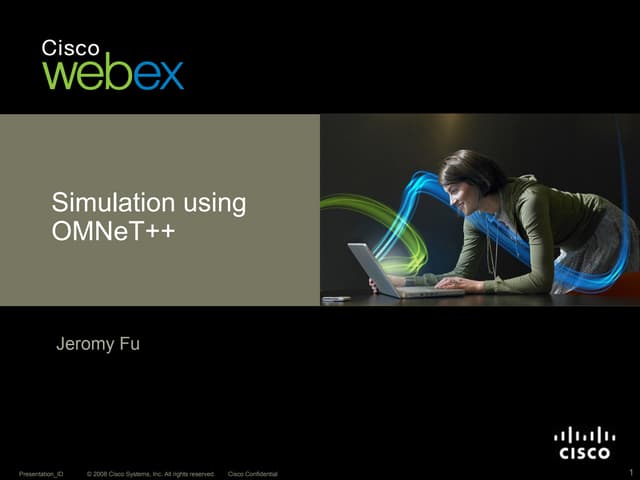
![More on probability
Pis(t) – Probability for an ant at node i to
choose shortest path at time t
𝑃𝑖𝑠(𝑡) =
(ɸ𝑖𝑠(𝑡) 𝜶
[ɸ𝑖𝑠 𝑡 ] 𝜶+[ɸ𝑖𝑙 𝑡 ] 𝜶
Pil(t) - Probability for an ant at node i to
choose longest path at time t
𝑃𝑖𝑙(𝑡) =
(ɸ𝑖𝑙(𝑡) 𝜶
[ɸ𝑖𝑠 𝑡 ] 𝜶+[ɸ𝑖𝑙 𝑡 ] 𝜶](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-11-320.jpg)















![Bibliography
[BDG93] R. Beckers,J. L. Deneubourg,and S. Goss. Modulation of trail laying in
the ant lasius niger (hymenoptera: Formicidae) and its role in the collective
selection of a food source. Journal of InsectBehavior,1993.
[CBTT92] Robert F. Cohen,G. Di Battista,R. Tamassia,and Ioannis G. Tollis.A
framework for dynamic graph drawing. CONGRESSUS NUMERANTIUM,42:149--
160,1992.
[CD97] Gianni Di Caro and Marco Dorigo. Antnet: A mobile agents approach to
adaptive routing. Technical report,1997.
[CD98] Gianni Di Caro and Marco Dorigo. Antnet: Distributed stigmergetic control
for communications networks. Journal of Artificial Intelligence Research,1998.
[Com12] OMNeT++ Community. 2001-2012. www.omnetpp.org/.
[DBB04] Marco Dorigo,Mauro Birattari,and Christian Blum. Ant Colony
Optimization and Swarm Intelligence 4th International Workshop,ANTS
2004,Brussels,Belgium,September 5-8,2004,Proceeding. Springer,2004.](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-33-320.jpg)
![Bibliography
[DS04] Marco Dorigo and Thomas Stützle. Ant Colony Optimization. Bradford
Company,Scituate,MA,USA,2004.
[DC99] Marco Dorigo and Gianni Di Caro. The ant colony optimization meta-
heuristic. In in New Ideas in Optimization,pages 11--32. McGraw-Hill,1999.
[DS04] Marco Dorigo and Thomas Stützle. Ant Colony Optimization. Bradford
Company,Scituate,MA,USA,2004.
[Far12] Muddassar Farooq. 2001-2012.
http://www.omnetpp.org/omnetpp/doc_details/2119unhboxvoidb@xkernz@char
‘discretionary{}{}{}antnetunhboxvoidb@xkernz@char‘discretionary{-}{}{}40.
[JLDP] S. Goss J.-L. Deneubourg,S. Aron and J. M. Pasteels. The selforganizing
exploratory pattern of the argentine ant. Journal of Insect Behavior.
[JLDP90] S. Goss J.-L. Deneubourg,S. Aron and J. M. Pasteels. The
selforganizing exploratory pattern of the argentine ant. Journal of Insect
Behavior,3:159â168,1990.](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-34-320.jpg)
![Bibliography
[MDC91] V. Maniezzo M. Dorigo and A. Colorni. The ant system: An autocatalytic
optimizing process. Technical Report ,Dipartimento di Elettronica,Politecnico di
Milano,pages 91--016 Revised,1991.
[MM89] J. Moy and Group J. Moy. The ospf specification. Technical
report,RFC,1989.
[Rap02] Theodore S Rappaport. Wireless Communications,Principles and
Practice. Prentice Hall,2 edition,2002. [Sym12] Dave Symonds. omnetpp
inetframework. 2006-2012.
[WFP+05] Horst F. Wedde,Muddassar Farooq,Thorsten Pannenbaecker, Bjoern
Vogel,Christian Mueller,Johannes Meth,and Rene Jeruschkat. Beeadhoc: an
energy efficient routing algorithm for mobile ad hoc networks inspired by bee
behavior. In GECCO,pages 153--160,2005.
[yCMZ+04] Baek young Choi,Sue Moon,Zhi-Li Zhang,Konstantina Papagiannaki,
and Christophe Diot. Analysis of point-to-point packet delay in an operational
network. In IEEE INFOCOM,2004.](https://image.slidesharecdn.com/7349aa8a-7463-4f01-a96d-d5b9ed25371a-160202160851/85/Final-project-35-320.jpg)

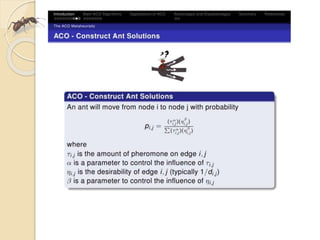
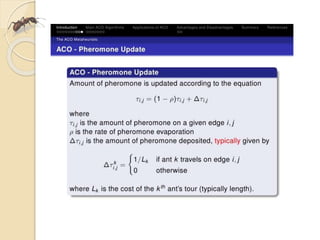
Ant colony optimization is a metaheuristic algorithm that is inspired by the behavior of real ant colonies. Real ants deposit pheromone on paths between their nest and food sources, and other ants are more likely to follow paths with higher pheromone densities, allowing the colony to find the shortest path over time without centralized control. The algorithm models this behavior to solve optimization problems, with artificial ants probabilistically building solutions and adjusting pheromone levels to bias toward better solutions. The presentation discusses how ant colony optimization works and its components, including probabilistic solution construction, pheromone updating, and evaporation. It then provides an example application of using ant colony optimization for adaptive routing in communication networks.