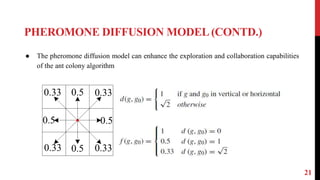
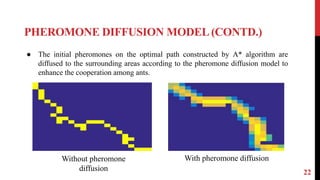
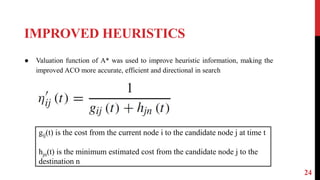
The document discusses ant colony optimization (ACO) and its application in path planning for mobile robots, addressing traditional method limitations like robustness and adaptability. It outlines improvements in ACO through algorithms that focus on pheromone initialization, diffusion models, and advanced heuristics for effective pathfinding. The paper highlights the use of a rolling window method for local path planning and the advantages of adapting ACO for dynamic environments.