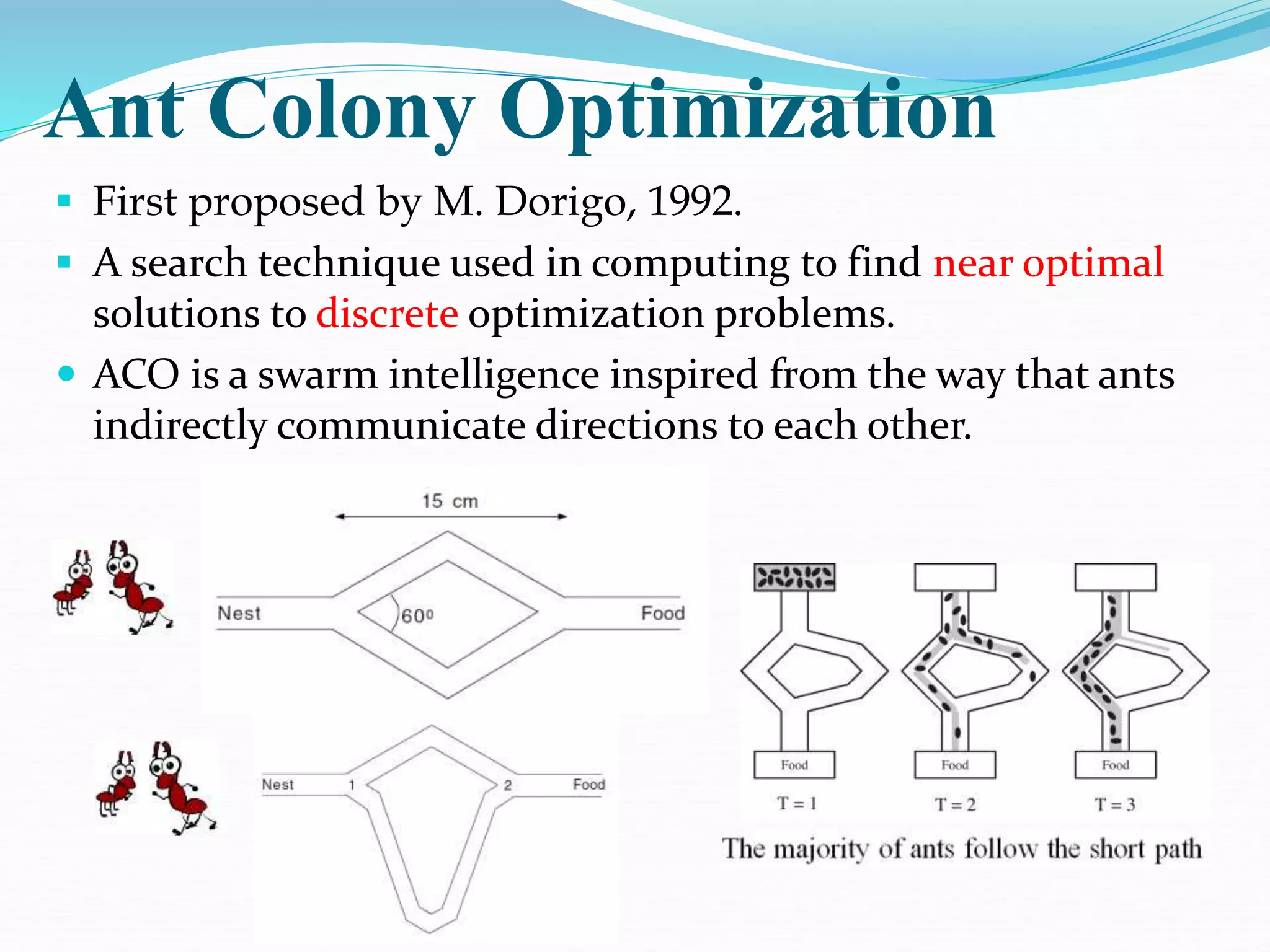
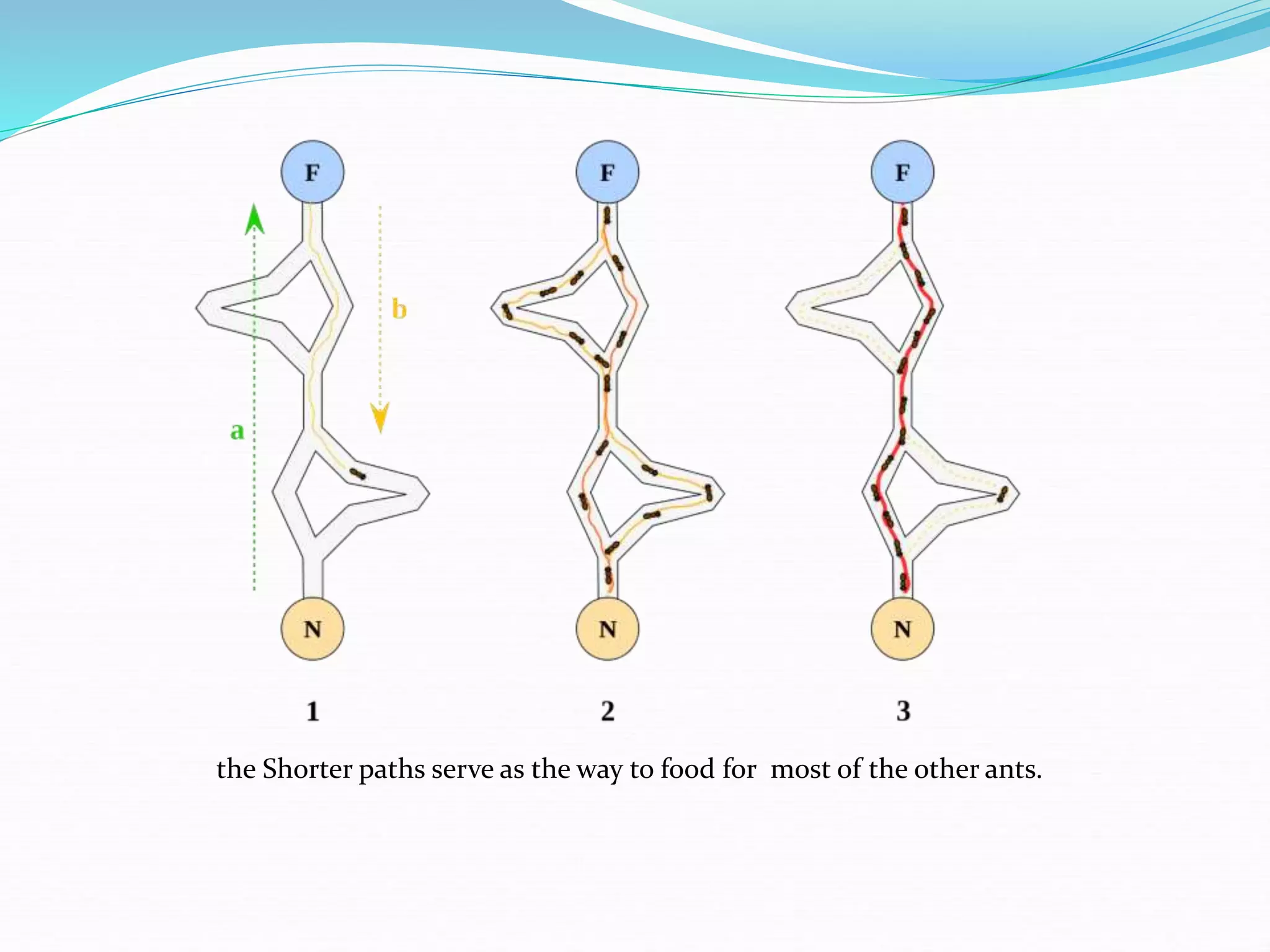
The document discusses ant colony optimization (ACO), which is an algorithm inspired by how ants find food. It describes how ants deposit pheromones to mark shorter paths, reinforcing them. The ACO algorithm simulates this process, with "ants" probabilistically building solutions and updating pheromones. It provides pseudocode and discusses applications to problems like the traveling salesman problem. ACO shows good performance on distributed, combinatorial optimization problems.
![Ant Colony Optimization
Key Terms
Ants 𝑘: Any possible solution.
Population 𝑁- Group of all ants.
Search Space [𝑙𝑏,𝑢𝑏]- All possible solutions to the problem.
Search Space is divided by step size ℎ
Pheromone trail 𝜏
Scaling parameter 𝜁
Evaporate rate ρ](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-8-2048.jpg)

![Iteration 1
A
E
D
C
B
1
[A]
5
[E]
3
[C]
2
[B]
4
[D]](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-23-2048.jpg)
![Iteration 2
A
E
D
C
B
3
[C,B]
5
[E,A]
1
[A,D]
2
[B,C]
4
[D,E]](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-24-2048.jpg)
![Iteration 3
A
E
D
C
B
4
[D,E,A]
5
[E,A,B]
3
[C,B,E]
2
[B,C,D]
1
[A,D,C]](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-25-2048.jpg)
![Iteration 4
A
E
D
C
B
4
[D,E,A,B]
2
[B,C,D,A]
5
[E,A,B,C]
1
[A,DCE]
3
[C,B,E,D]](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-26-2048.jpg)
![Iteration 5
A
E
D
C
B
1
[A,D,C,E,B]
3
[C,B,E,D,A]
4
[D,E,A,B,C]
2
[B,C,D,A,E]
5
[E,A,B,C,D]](https://image.slidesharecdn.com/53564379-ant-colony-optimization-230125090022-ab4cc0a2/75/53564379-Ant-Colony-Optimization-ppt-27-2048.jpg)