Downloaded 1,842 times


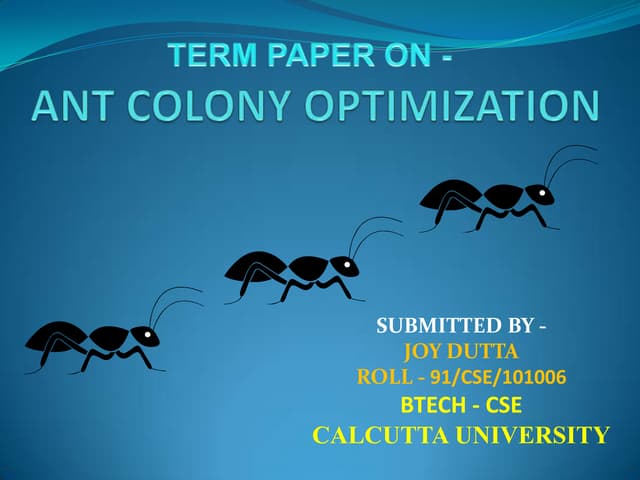
![A simple TSP example A D C B d AB =8;d BC = 4;d CD =15;d DA =6 1 [] 4 [] 3 [] 2 []](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-16-320.jpg)
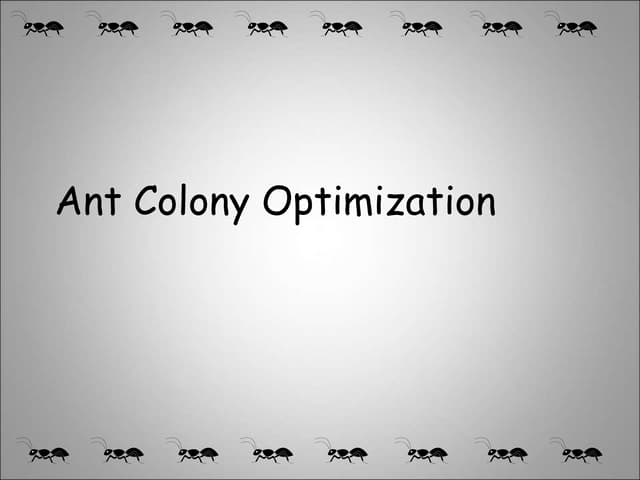
![Iteration 1 A D C B 1 [A] 3 [C] 2 [B] 4 [D]](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-17-320.jpg)
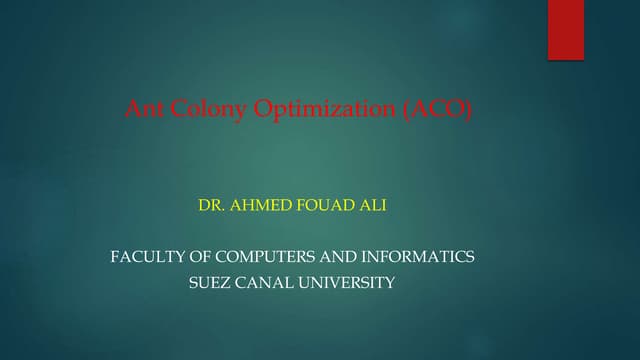
![How to build next sub-solution? A D C B 1 [A]](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-18-320.jpg)
![Iteration 2 A D C B 2 [B,C] 3 [C,D] 1 [A,B] 4 [D,A]](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-19-320.jpg)
![Iteration 3 A D C B 2 [B,C,D] 3 [B,C,A] 4 [D,A,B] 1 [A,B,C]](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-20-320.jpg)
![Iteration 4 A D C B 1 [A,B,C,D] 2 [B,C,D,A] 3 [C,D,A,B] 4 [D,A,B,C]](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-21-320.jpg)
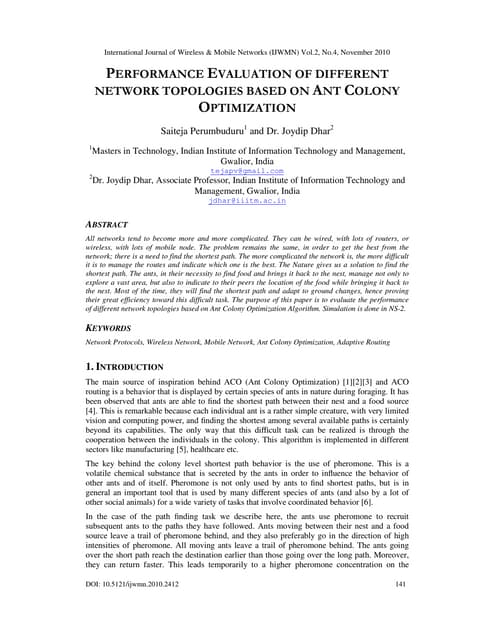
![Path and Pheromone Evaluation L 1 =27 L 2 =25 L 3 =29 L 4 =18 1 [A,B,C,D 2 [B,C,D,A] 3 [C,D,A,B] 4 [D,A,B,C] Best tour](https://image.slidesharecdn.com/antcolonyoptimization-120221190648-phpapp02/85/Ant-colony-optimization-22-320.jpg)
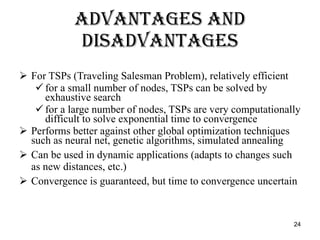

Ant colony optimization is a swarm intelligence technique inspired by the behavior of ants. It is used to find optimal paths or solutions to problems. The key aspects are that ants deposit pheromones as they move, influencing the paths other ants take, with shorter paths receiving more pheromones over time. This results in the emergence of the shortest path as the most favorable route. The algorithm is often applied to problems like the traveling salesman problem to find the shortest route between nodes.