The document outlines a project on an automatic solar tracker using Arduino, aimed at optimizing solar energy capture by adjusting photovoltaic panels' orientation according to the sun's position. It describes the components involved, including dual axis trackers, the Arduino Severino board, LDR sensors for tracking sunlight, and servo motors for panel movement. The project addresses the variability of solar energy availability and proposes a solution for maximizing solar intensity throughout the day.
INTRODUCTION
Solar energy isa very large, inexaustable source of energy.
The power from the sun intercepted by the earth is
approximatel 1.8*1011 MW.
Solar energy could supply all the present and future energyb
needs of the world on a continuing basis. This makes it one
of the most promising of the unconventional energy
sources.
4.
PROBLEM WITH SOLAR
Problem associated with the use of solar energy is
that its availability varies widely with time. The
variation in availability occurs daily because of the
day night cycle and also seasonally because of the
earth’s orbit around the sun.
To rectify these above problems the solar panel should
be such that it always receive maximum intensity of
light.
5.
INTRODUCTION
Solar Tracker: -
Solar trackers are devices used to orient photovoltaic
panels, reflectors, lenses or other optical devices toward the
sun.
Since the sun’s position in the sky changes with the seasons
and the time of day, trackers are used to align the collection
system to maximize energy production.
6.
Dual Axis Tracker:
Dual axis trackers have two degrees of freedom that act as
axes of rotation. These axes are typically normal to one
another.
Dual axis trackers allow for optimum solar energy levels
due to their ability to follow the sun vertically and
horizontally.
Here we have divide sun position into five areas and those
are EAST, WEST, NORTH, SOUTH, CENTER.
7.
Arduino Severino Board
Arduino is a development platform for the purpose of
programing AVR microcontrollers.
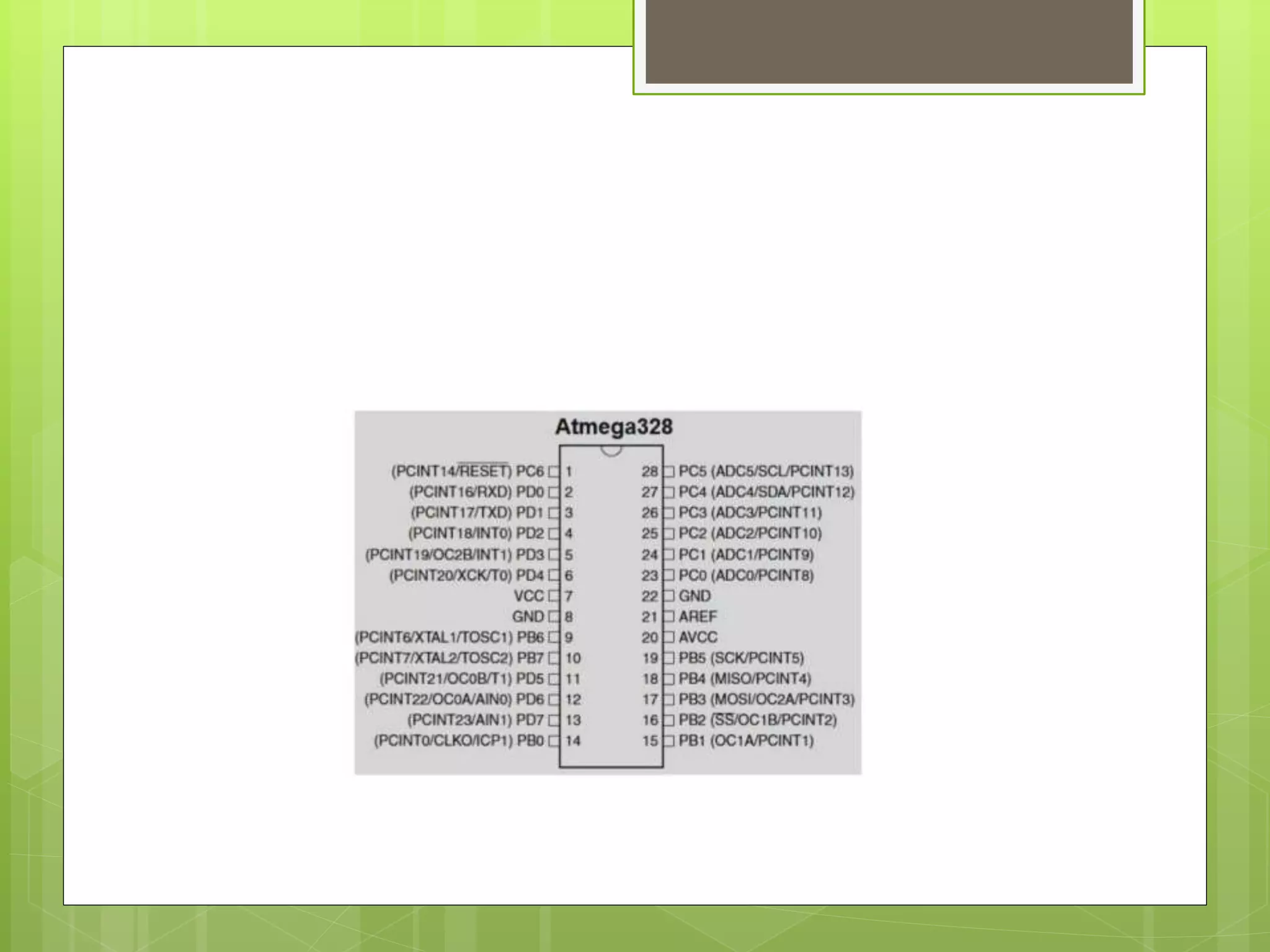
Arduino Severino board is used to program 28 pin DIP
ATMEGA168 IC.
Here we are using 16MHz crystal for operating frequency.
ATMEGA328:
The ATMEGA168is a modified Harvard architecture 8-bit
RISC single chip microcontroller which was developed
by Atmel in 1996.
Features: -
Flash : 16KB
EEPROM : 1024B
SRAM : 512B
Clock freq. : upto 20MHz
Supply voltage : 2.8-5.5V
Ext. Interrupt : 24
PWM : 6
11.
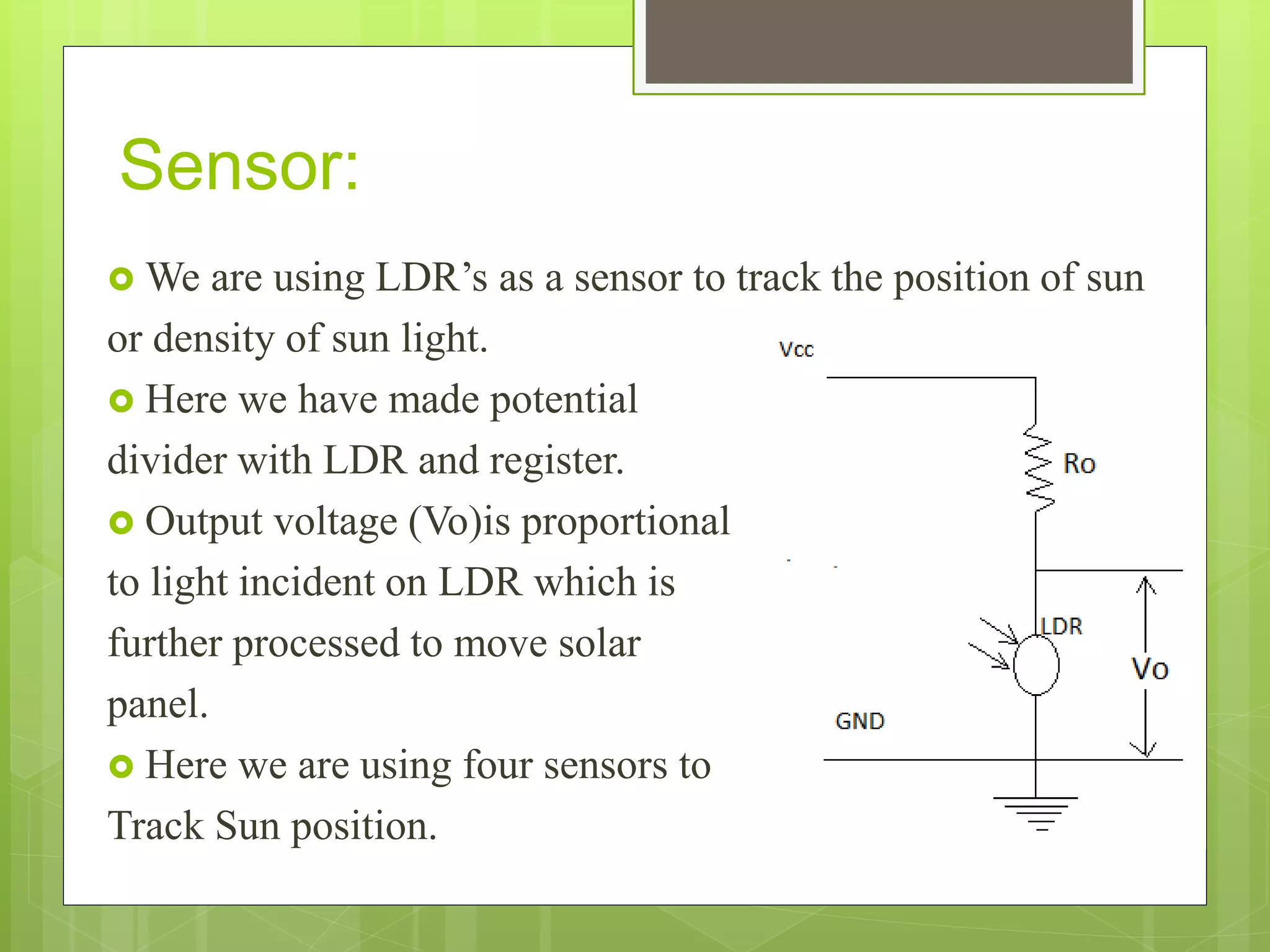
Sensor:
We areusing LDR’s as a sensor to track the position of sun
or density of sun light.
Here we have made potential
divider with LDR and register.
Output voltage (Vo)is proportional
to light incident on LDR which is
further processed to move solar
panel.
Here we are using four sensors to
Track Sun position.
12.
Servo Motor:
Servomotors has three wires.
Among those 3 wires, 2 wires provide power supply to the
motor and one is used to send PWM signals {50Hz (analog
servos) or 400-500Hz (digital servos)} to the motor for
required shaft positions.
Servo shaft is rotated by an angle depending on the ON-
Time and OFF-time of the pulse.
Here we are using two servo motors- One for Horizontal
movement and another for Vertical movement.

































![Review2BATCH7[2].pptxdsvgrdskjhiuevjhfnwiukj](https://cdn.slidesharecdn.com/ss_thumbnails/review2batch72-250419142152-f350fd1f-thumbnail.jpg?width=640&height=640&fit=bounds)























