Download to read offline
![1
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
Physion: Evaluating Physical Prediction
from Vision in Humans and Machines
Presenter: Kei Ota (@ohtake_i).](https://image.slidesharecdn.com/20211001physiondl-211001031000/75/DL-Physion-Evaluating-Physical-Prediction-from-Vision-in-Humans-and-Machines-1-2048.jpg)
![背景
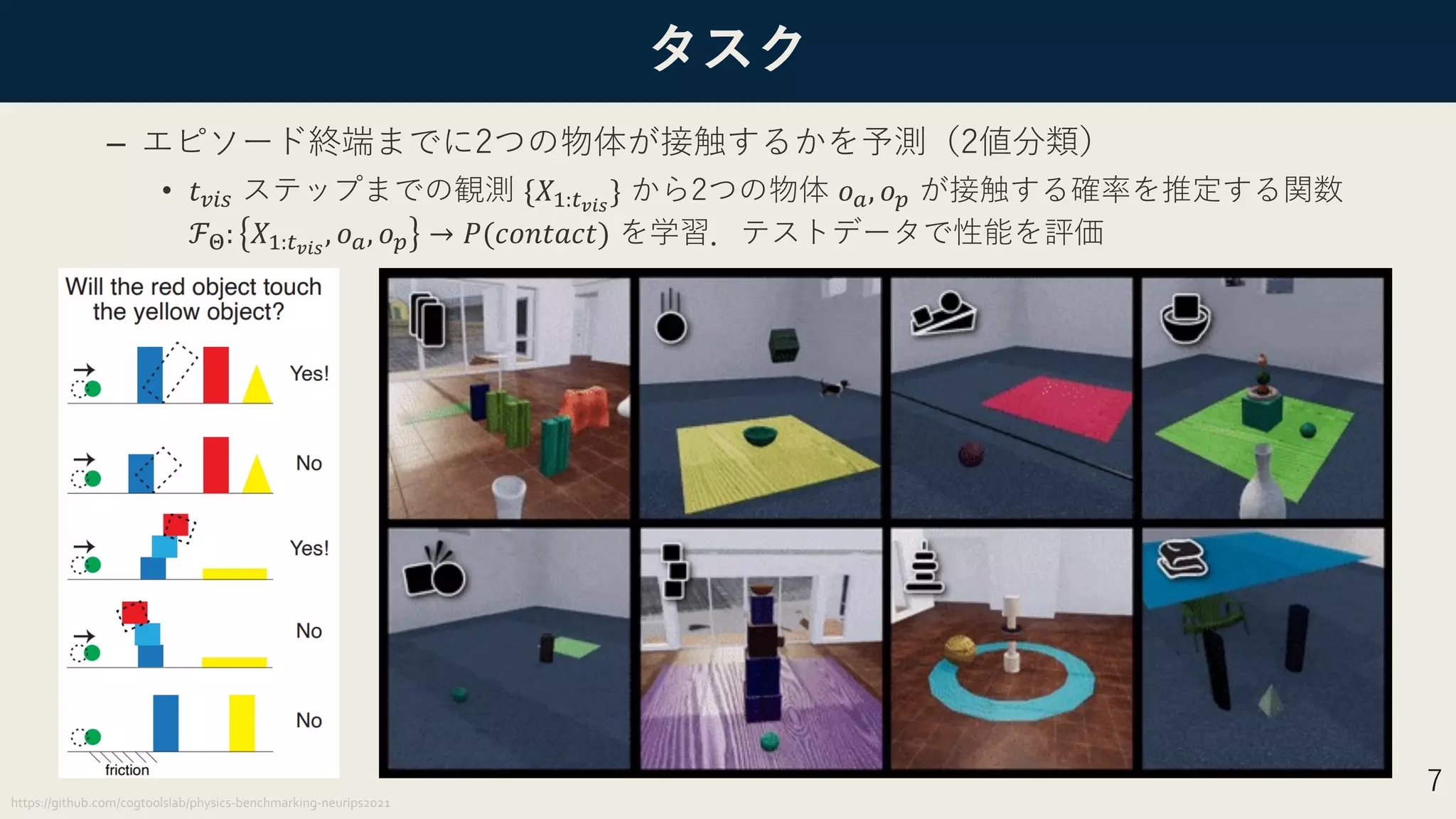
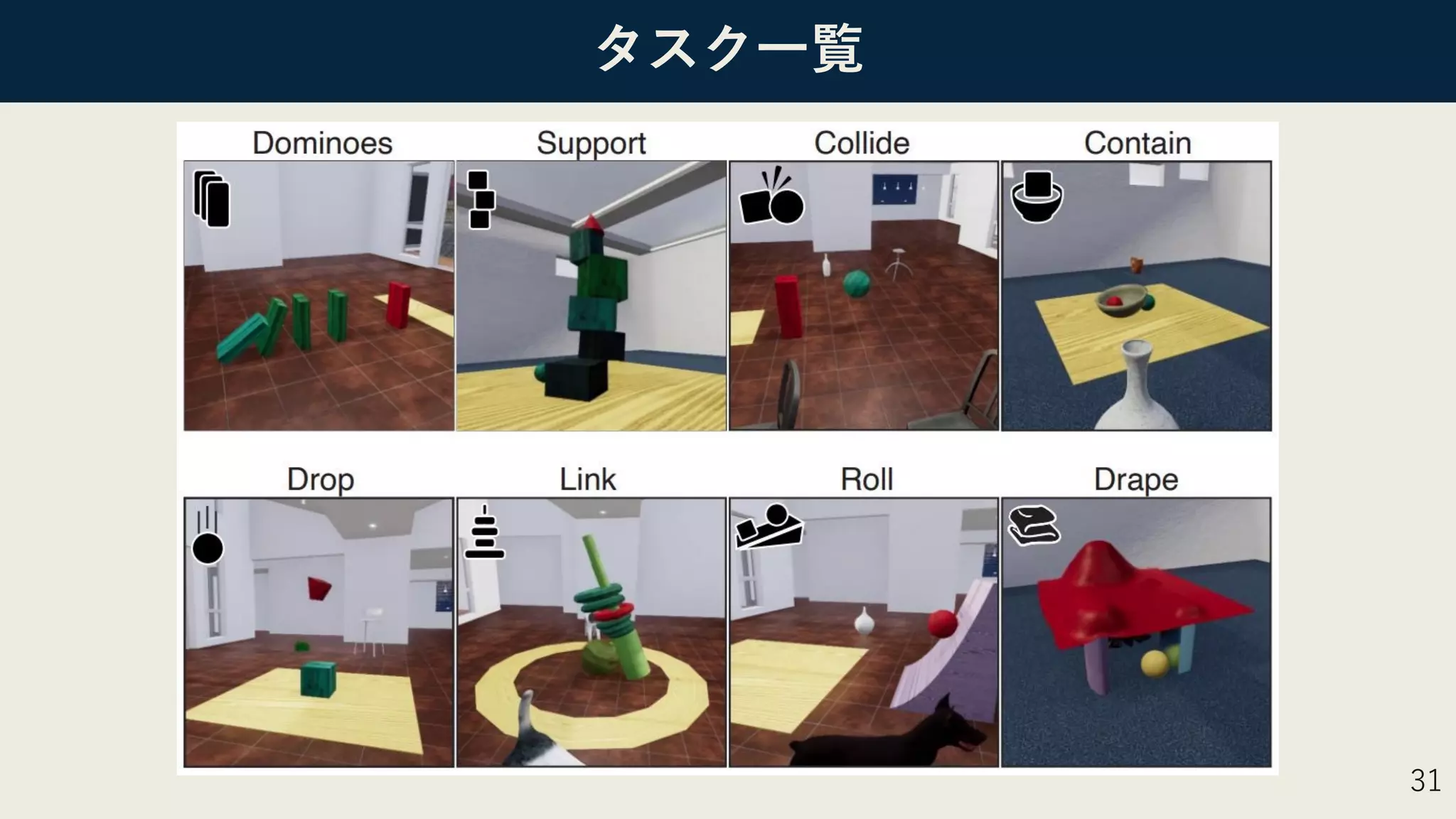
• 既存のベンチマーク・データセットは以下の要求を満たしていない
– ⽇常⽣活で観測する様々な状況を網羅
– 物理的に正確な動作,実世界に近い描写,多様な物理特性
5
[Groth, et al., ECCV2018]
[Riochet, et al., arXiv]
[Bakhtin, et al., NeurIPS2019]](https://image.slidesharecdn.com/20211001physiondl-211001031000/75/DL-Physion-Evaluating-Physical-Prediction-from-Vision-in-Humans-and-Machines-5-2048.jpg)
![33
DEEP LEARNING JP
[DL Papers]
http://deeplearning.jp/
Physion: Evaluating Physical Prediction
fromVision in Humans and Machines
Presenter: Kei Ota (@ohtake_i).](https://image.slidesharecdn.com/20211001physiondl-211001031000/75/DL-Physion-Evaluating-Physical-Prediction-from-Vision-in-Humans-and-Machines-33-2048.jpg)

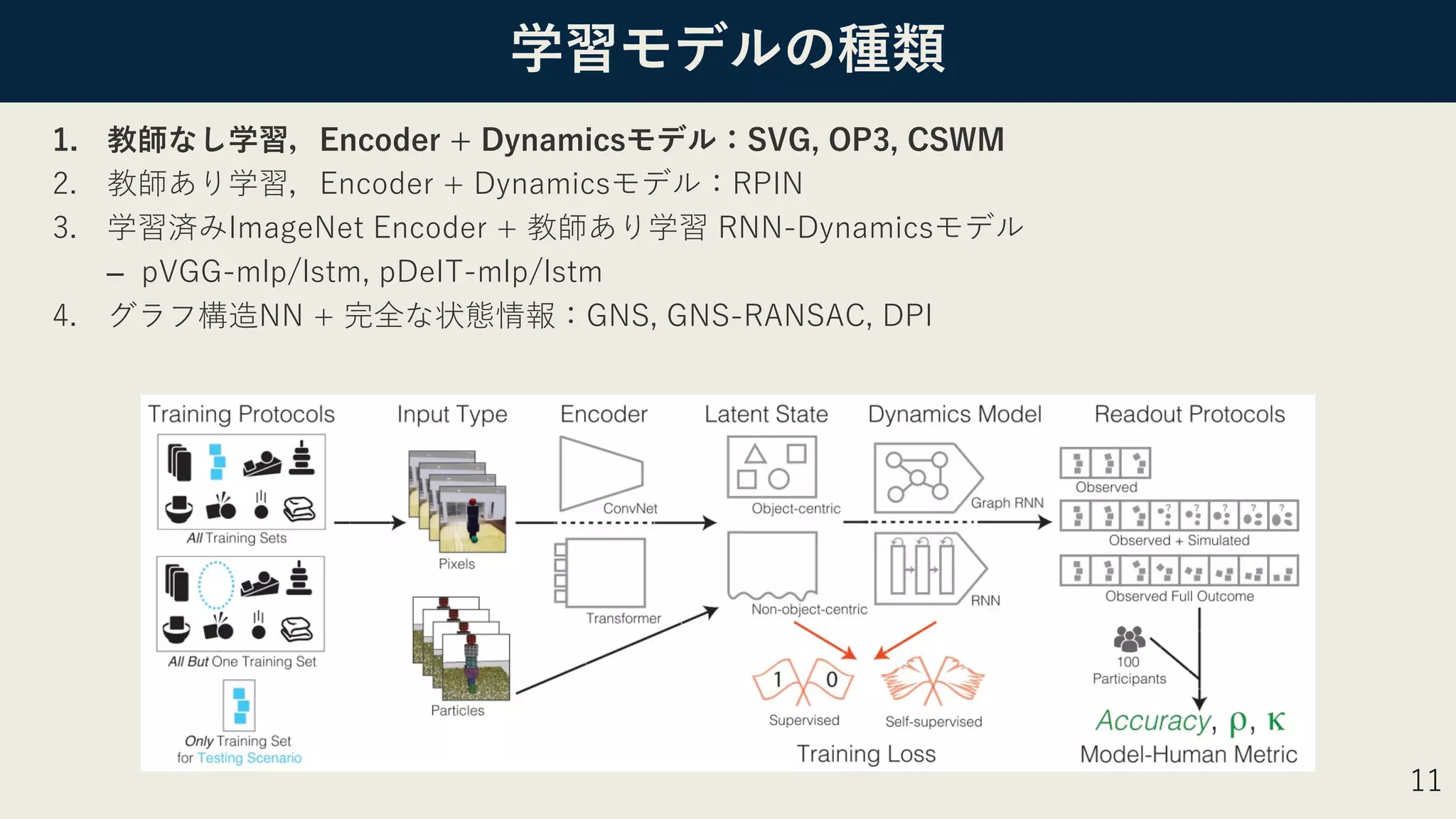
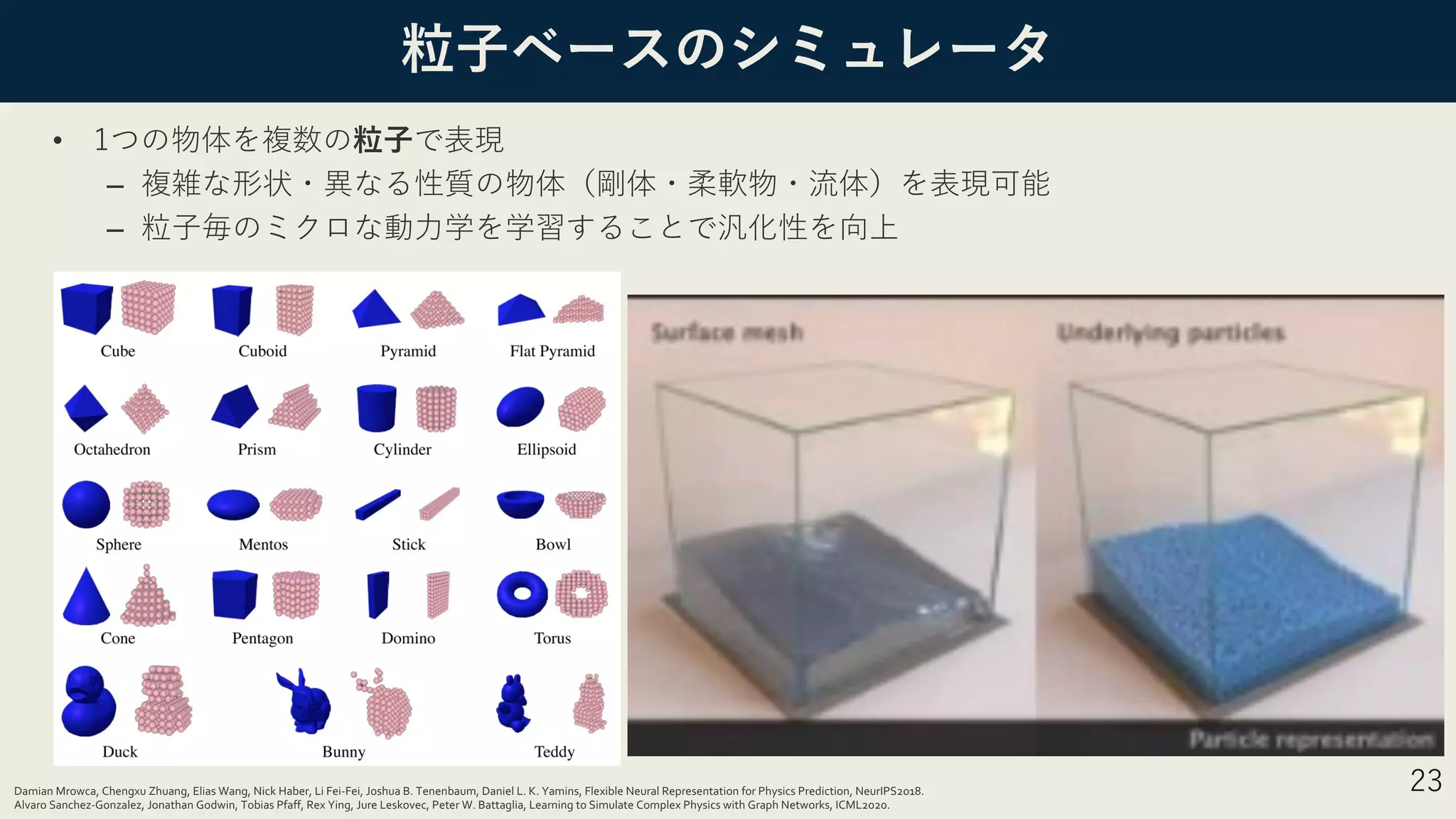
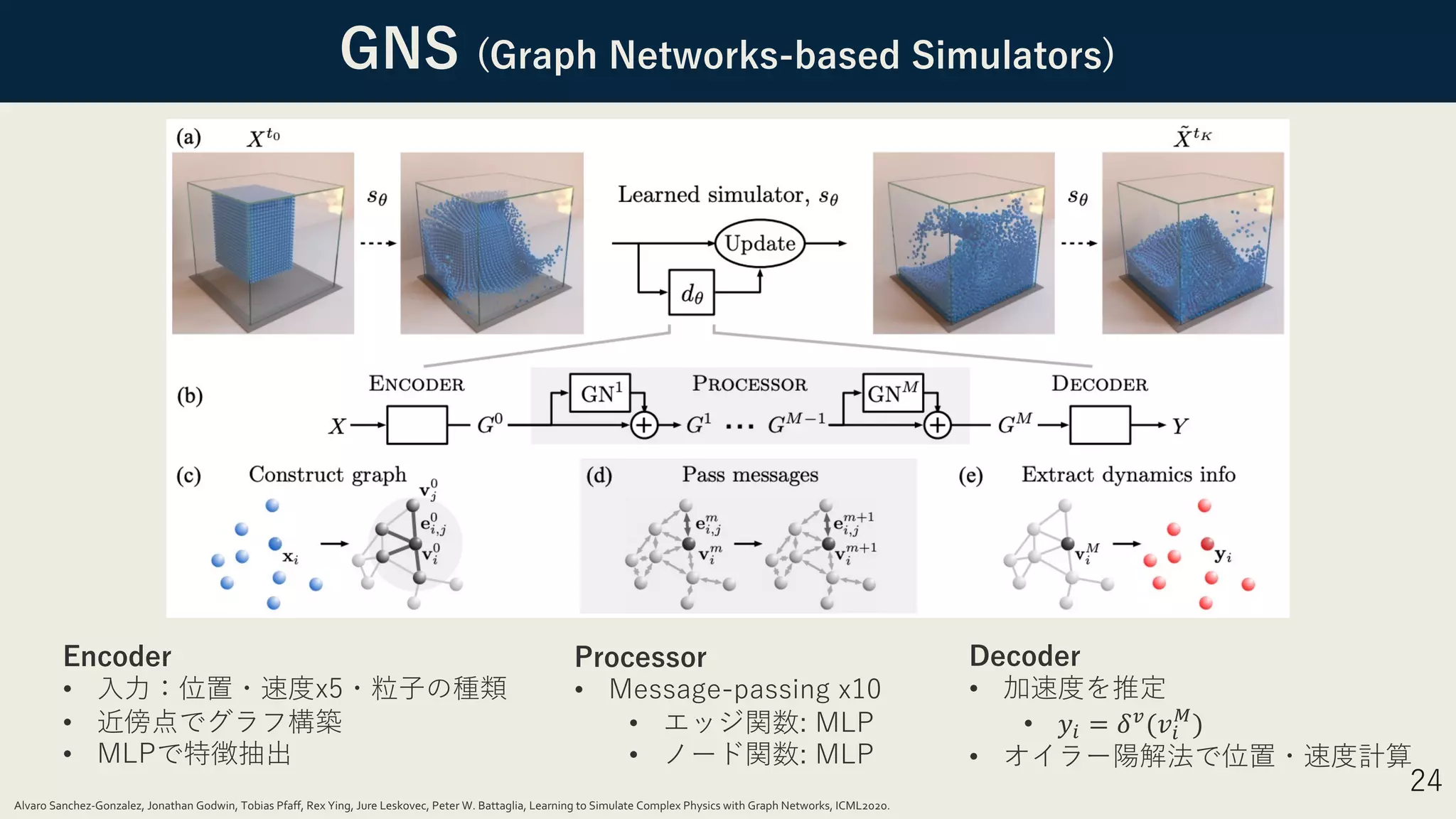
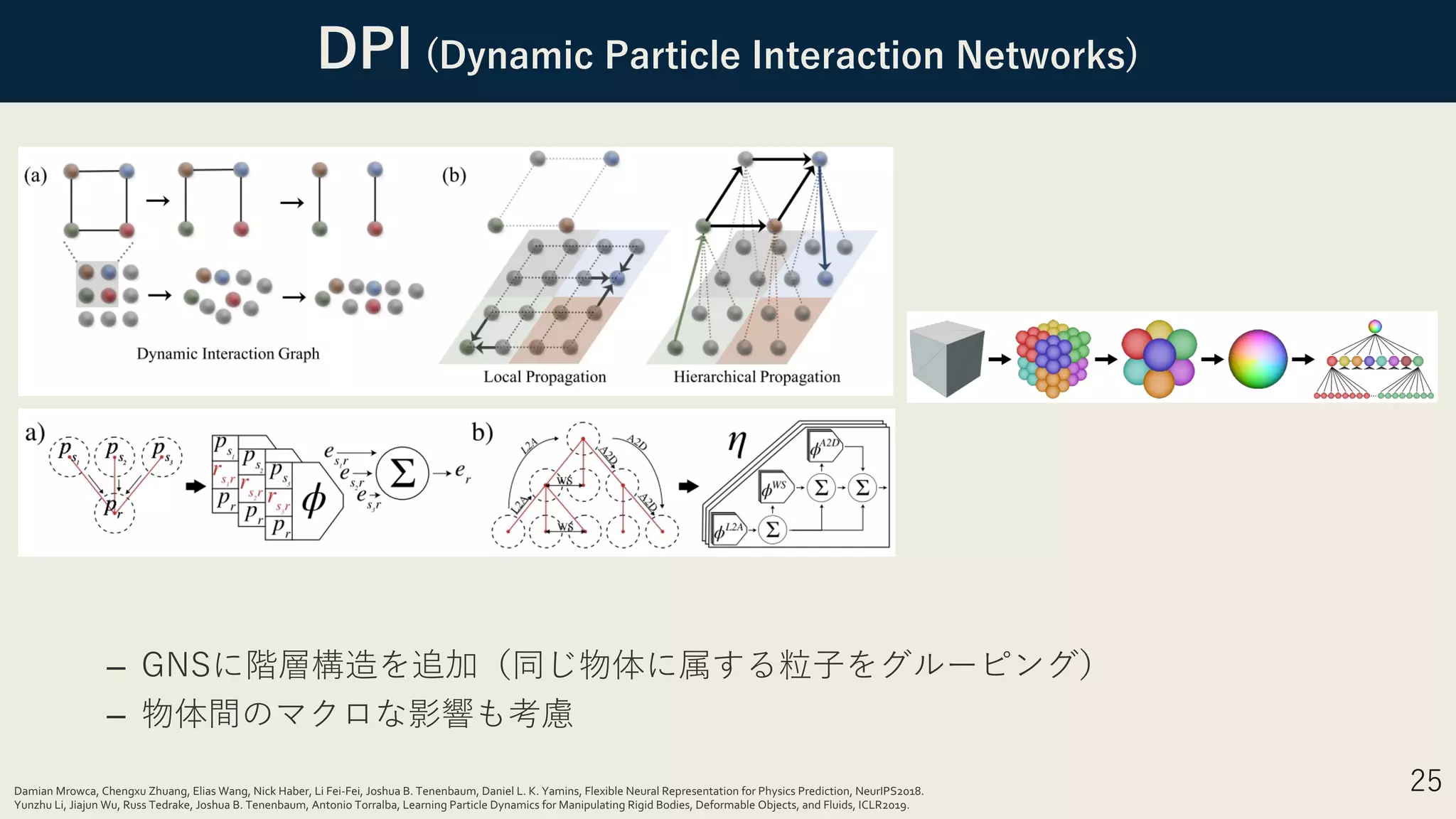
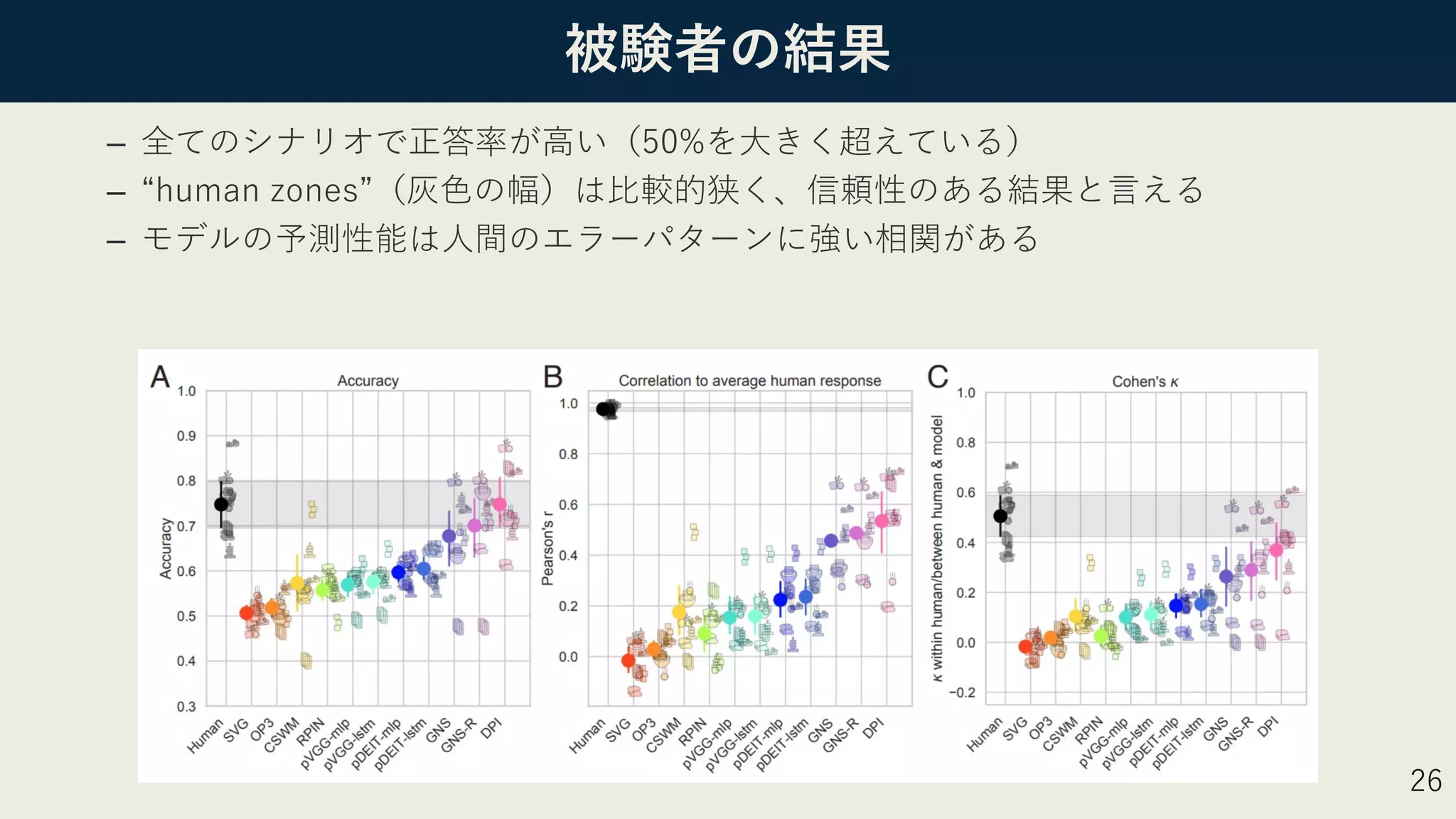
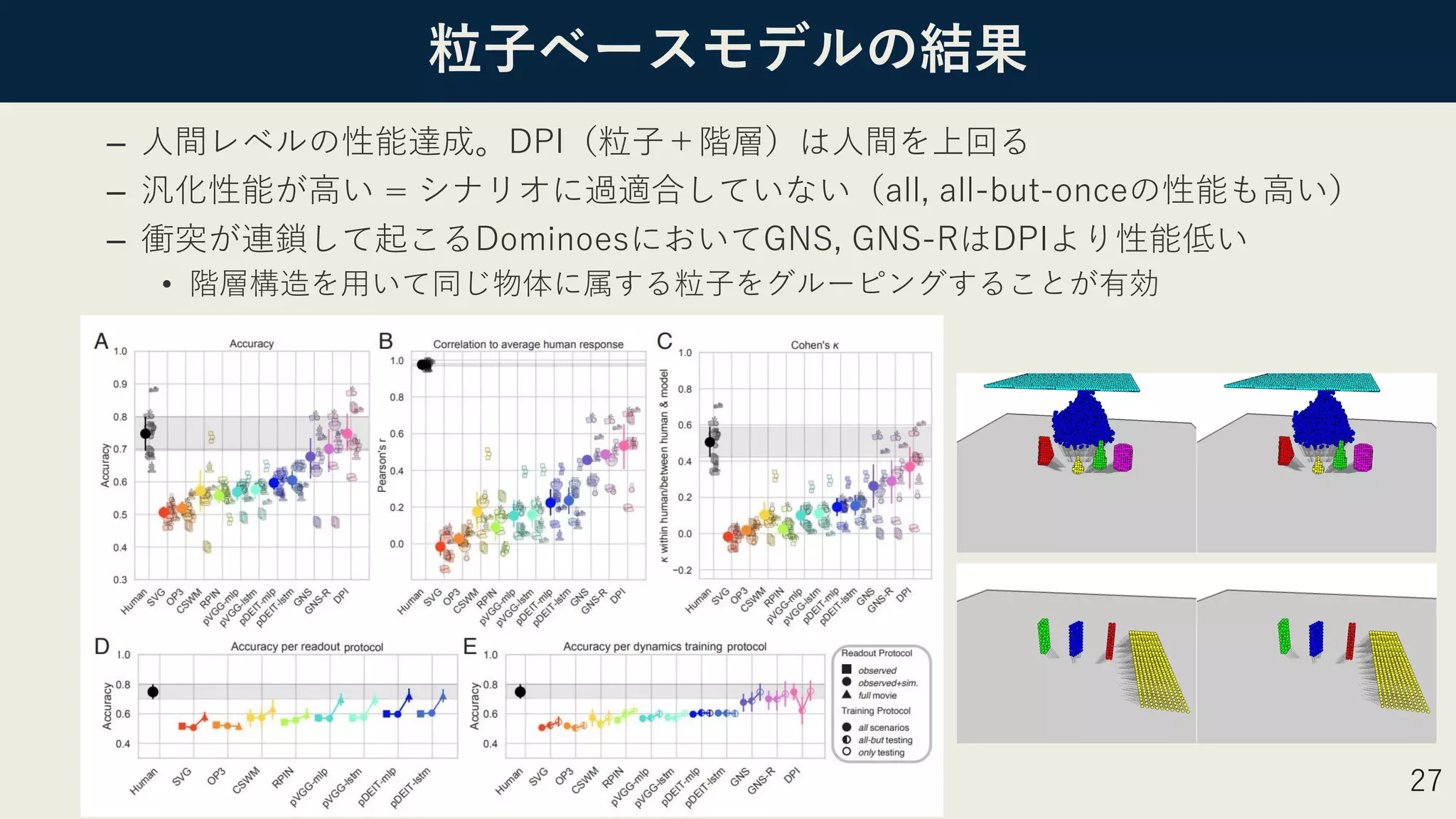
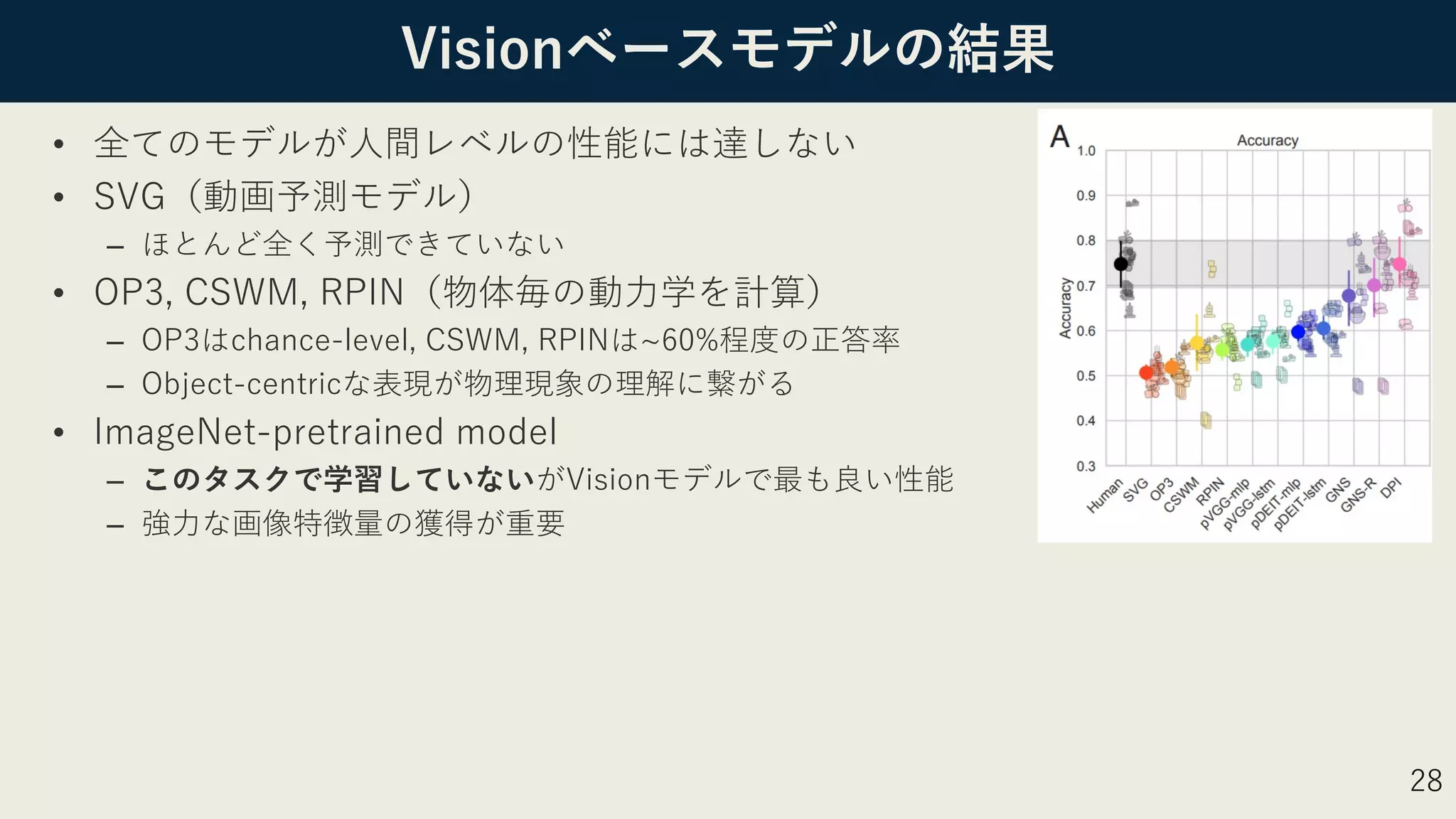
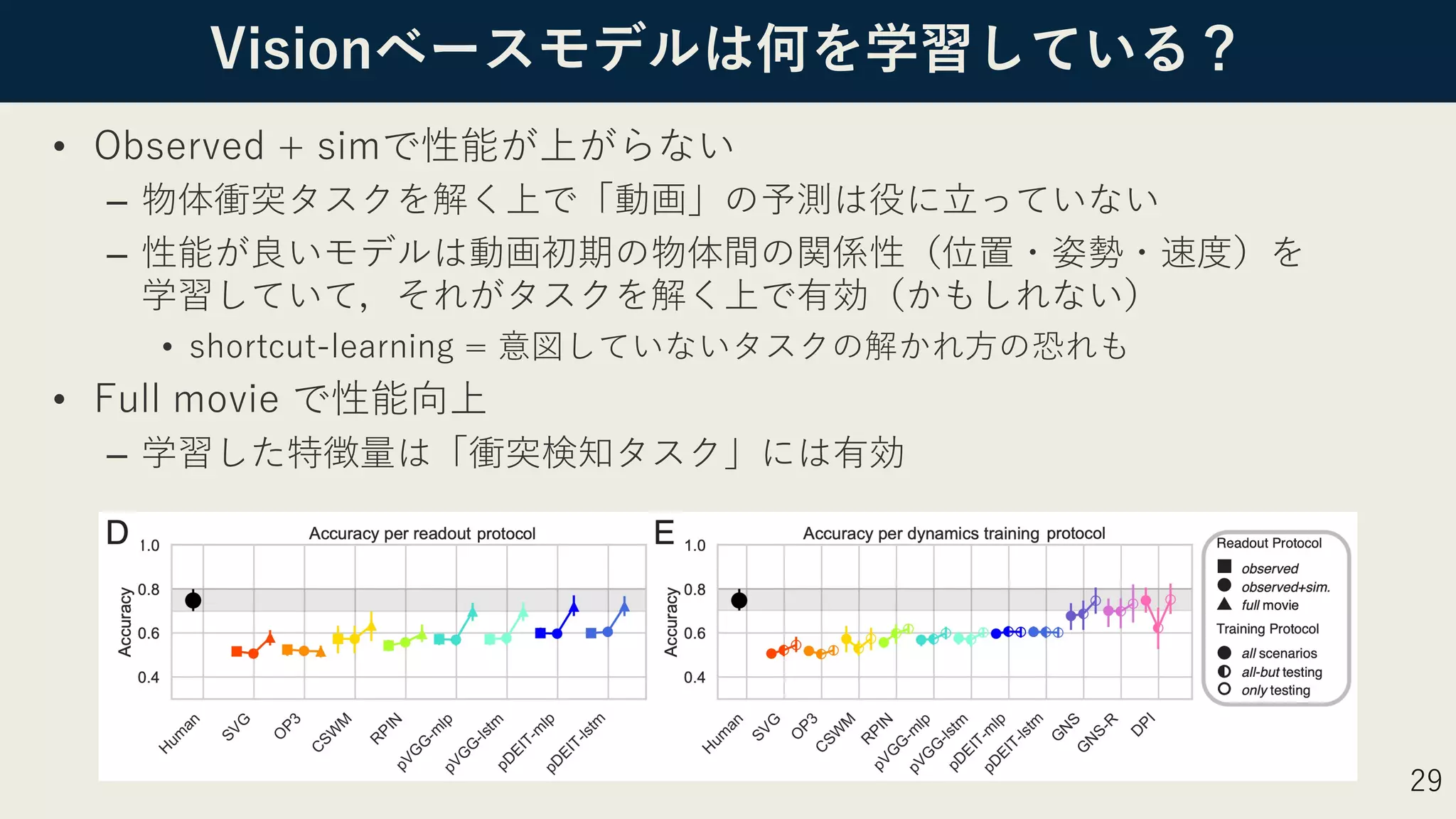
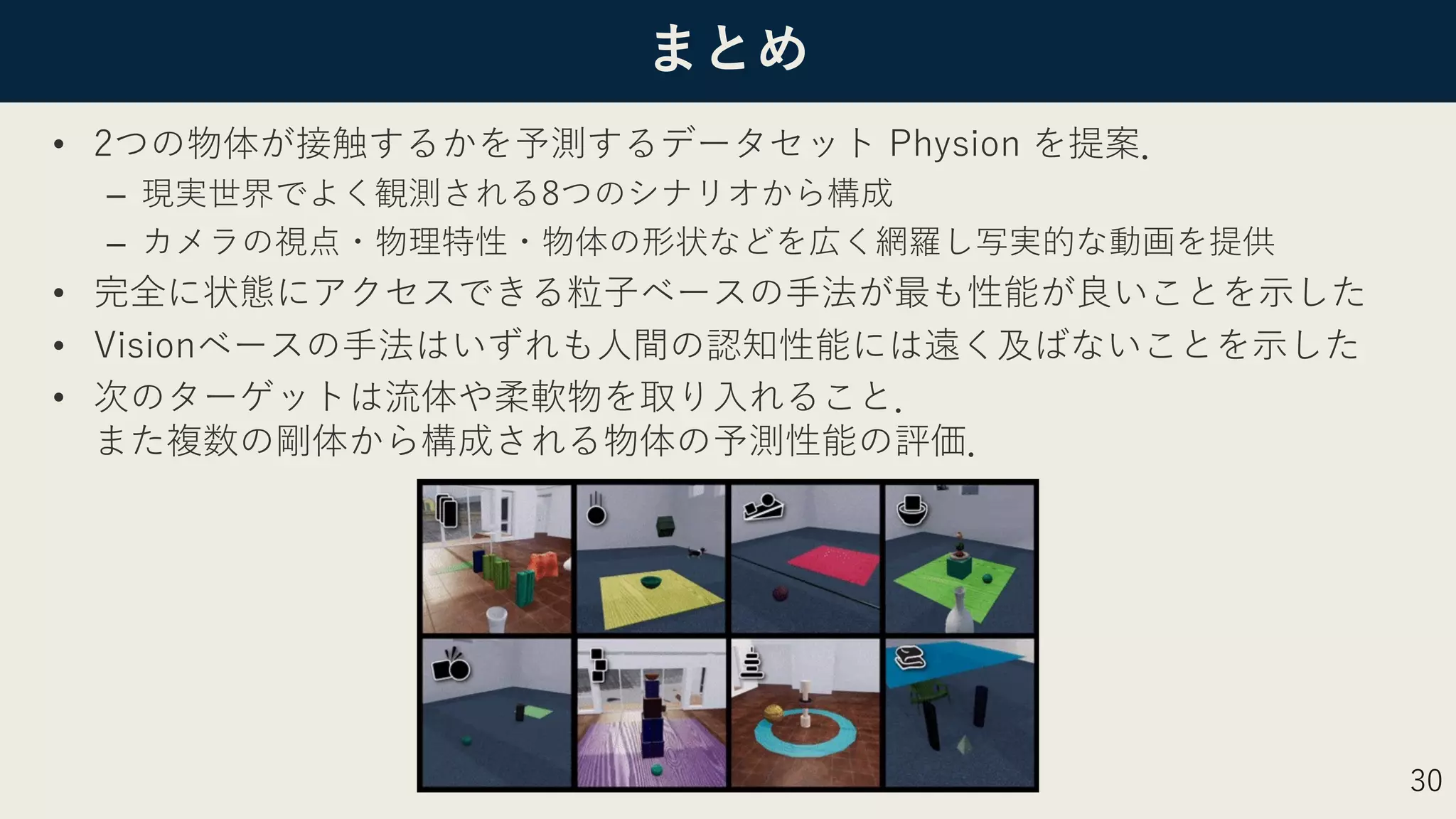
This document summarizes a research paper that proposes a new dataset called Physion for evaluating how well machine learning models can predict physical interactions from vision, similar to humans. The dataset contains videos of common physical phenomena. Several state-of-the-art models were evaluated on the dataset, including particle-based simulators and vision-based models. Particle-based simulators achieved performance on par with humans, while vision-based models performed poorly. The document provides background on the motivation for the dataset and describes the different models and their approaches.



![[DL輪読会]マルチエージェント強化学習と⼼の理論 〜Hanabiゲームにおけるベイズ推論を⽤いたマルチエージェント 強化学習⼿法〜](https://cdn.slidesharecdn.com/ss_thumbnails/0917imai1-210917021923-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Learning Visible Connectivity Dynamics for Cloth Smoothing (CoRL2021)](https://cdn.slidesharecdn.com/ss_thumbnails/vcddl-211210051223-thumbnail.jpg?width=640&height=640&fit=bounds)


















![[PR12] PR-063: Peephole predicting network performance before training](https://cdn.slidesharecdn.com/ss_thumbnails/peepholepredictingnetworkperformance-180130162632-thumbnail.jpg?width=640&height=640&fit=bounds)












































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)














