Downloaded 39 times

![Perception and Intelligence Lab.
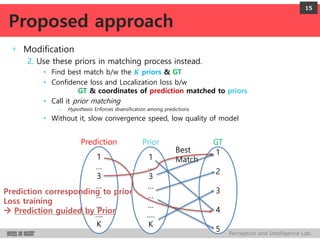
+ Model
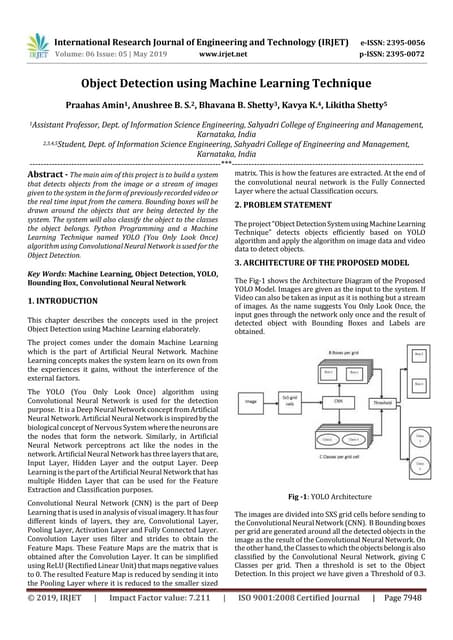
Encode i-th object box and its confidence as node values of last net layer
+ Bounding box
Upper-left and lower-right co-ordinates
Vector: 𝒍𝒊 ∈ ℝ 𝟒
4 node values
Normalized co-ordinates w.r.t. image dim.
Linear transform of the last hidden layer
+ Confidence
Confidence score for the box containing an object
Score: 𝒄𝒊∈ [𝟎, 𝟏] 1 node value
Linear transform of the last hidden layer followed by a sigmoid
4
x1, y1
x2, y2
𝒍𝒊=[x1 y1 x2 y2]
Proposed approach](https://image.slidesharecdn.com/150424scalableobjectdetectionusingdnn-170610061034/85/150424-Scalable-Object-Detection-using-Deep-Neural-Networks-4-320.jpg)
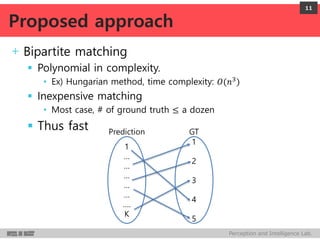
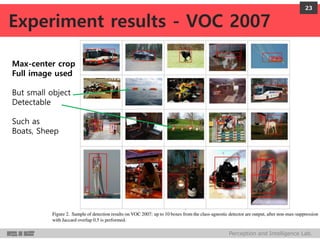
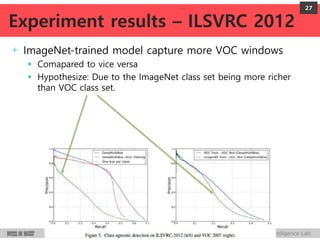
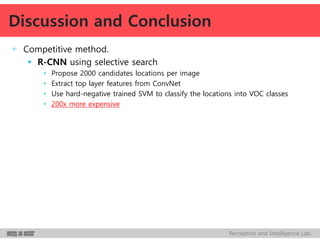


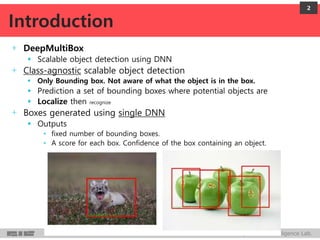
DeepMultiBox is a scalable object detection method using deep neural networks that detects objects in a class-agnostic manner. It predicts bounding boxes and confidence scores using a single DNN. It formulates object detection as a regression problem to optimize bounding box coordinates and confidences. It was shown to achieve competitive detection results on PASCAL VOC 2007 with faster runtime than other methods.
















































![[DSC Europe 25] Andrzej Kowalczyk - AI - how to start small and grow in the f...](https://cdn.slidesharecdn.com/ss_thumbnails/oy1zmo94qv6vpcqjvno2-andrzej-kowalczyk-ai-how-to-start-small-and-grow-in-the-future-1-260119121559-cf093b23-thumbnail.jpg?width=640&height=640&fit=bounds)














