![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 15
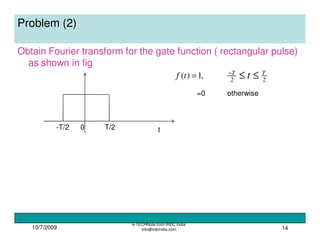
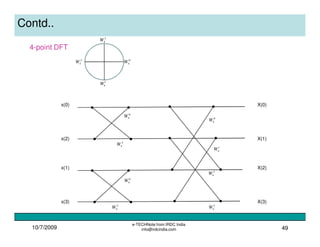
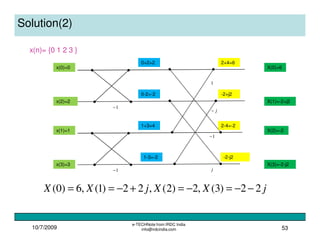
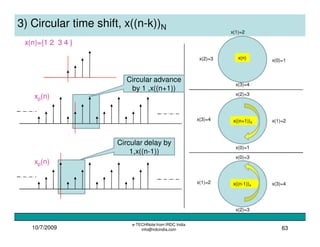
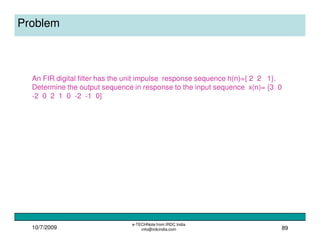
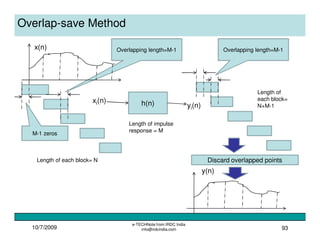
Solution (2)
We know
∫
∞
∞−
−
= dtetfwF jwt
)()(
∫−
−
=
2/
2/
.1
T
T
jwt
dte
2/
2/
T
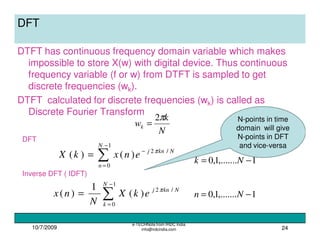
T
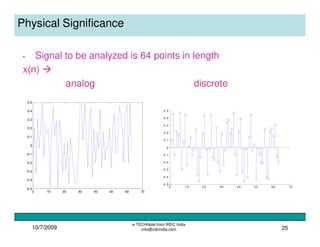
jwt
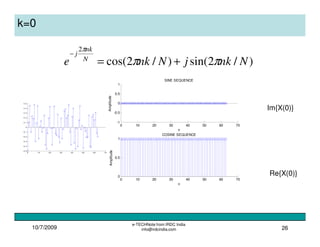
jw
e
−
−
−
= [ ]2/2/1 jwTjwT
ee
jw
−
−
= −
jw
ee jwTjwT 2/2/
−
=
−
w
wT )2/sin(2
=
)2/(sin
2/
)2/sin(
wTcT
wt
wT
T ==
Amplitude
Phase](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-15-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 35
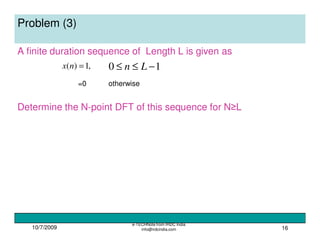
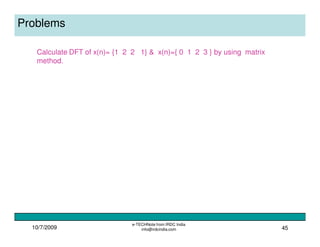
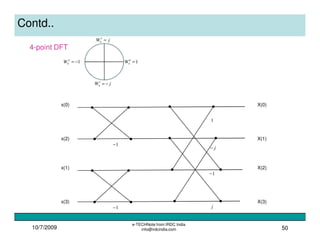
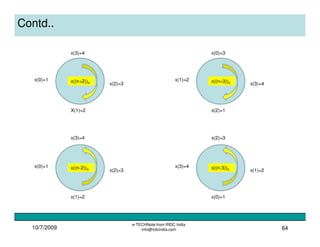
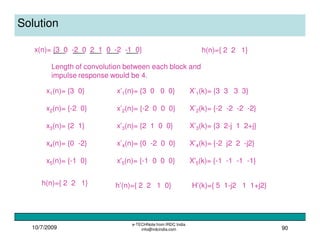
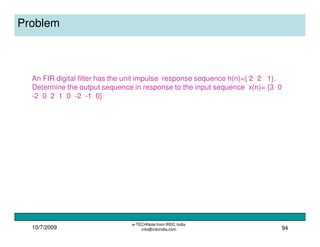
Solution(1)
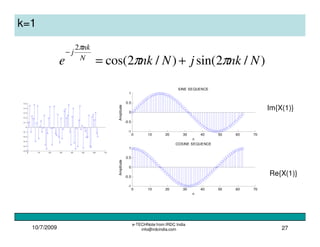
N=6 )]6/5cos(),3/2cos(),2/cos(),3/cos(),6/cos(),0[cos()( πππππ=∴ nx
]86.05.005.086.01[ −−=
We know
∑
−
=
−
=
1
0
/2
)()(
N
n
Nknj
enxkX π
1,.......1,0 −= Nk
For k=0
∑∑ ==
==
5
0
5
0
0
)()()0(
nn
nxenxX
)86.0()5.0(05.086.01 −+−++++=
1=
For k=1
∑=
−
=
5
0
3/
)()1(
n
nj
enxX π
3/53/4
3/23/0
)5()4()3(
)2()1()0(
πππ
ππ
jjj
jj
exexex
exexex
−−−
−−
+++
++=](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-35-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 43
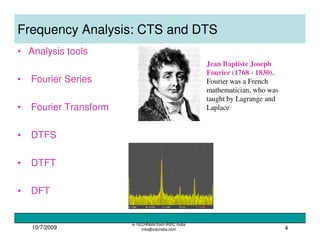
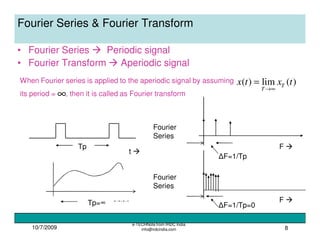
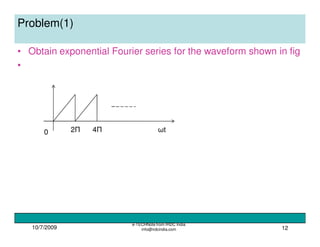
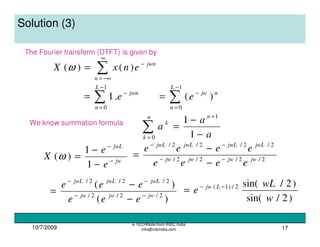
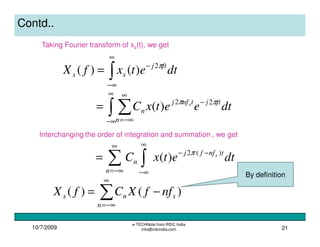
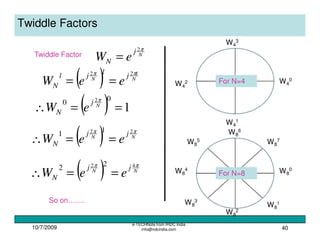
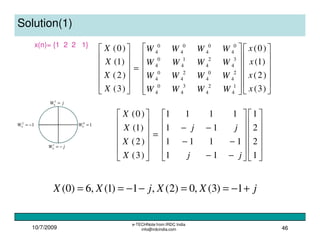
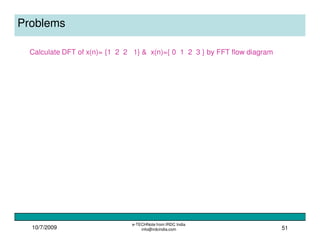
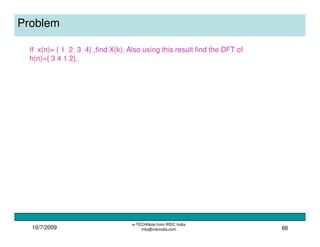
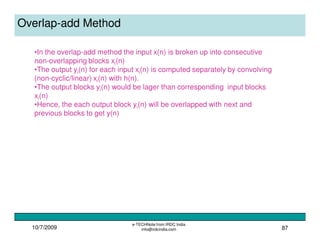
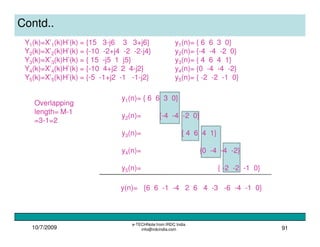
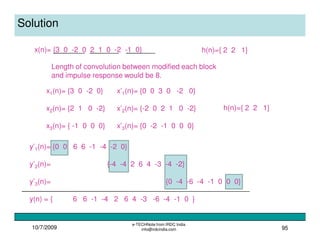
Matrix Method for DFT calculation
∑
−
=
−
=
1
0
/2
)()(
N
n
Nknj
enxkX π
1,.......1,0 −= Nk
∑
−
=
=∴
1
0
)()(
N
n
kn
NWnxkX 1,.......1,0 −= Nk
We know
N
j
N eW
π2−
=and
In matrix form ]][[][ xWX kn
N=
=
)3(
)2(
)1(
)0(
)3(
)2(
)1(
)0(
9
4
6
4
3
4
0
4
6
4
4
4
2
4
0
4
3
4
2
4
1
4
0
4
0
4
0
4
0
4
0
4
x
x
x
x
WWWW
WWWW
WWWW
WWWW
X
X
X
X4-point DFT](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-43-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 60
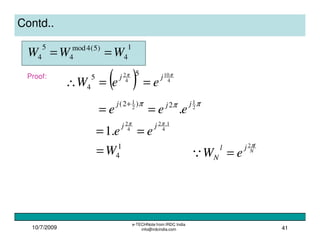
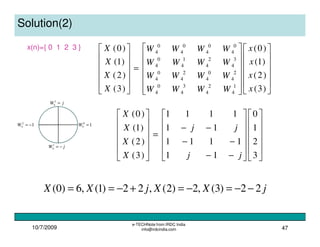
Properties of DFT
1) Periodicity
and x[n] is periodic such that x[n+N]=x[n] for all n
If x[n] X(k) ,
Then, X[k+N] = X(k) for all k
i.e. DFT of periodic sequence is also periodic with same period](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-60-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 61
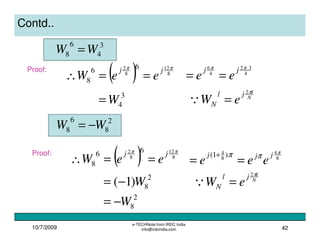
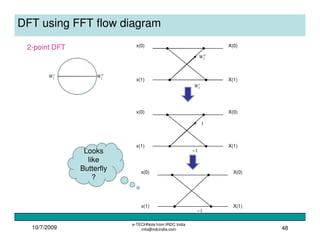
2) Linearity
][][
][][
22
11
kXnx
kXnx
DFT
DFT
→←
→←If
and
then for any real-valued or complex valued constants a1 and a2 ,
][][][][ 22112211 kXakXanxanxa DFT
+ →←+](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-61-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 65
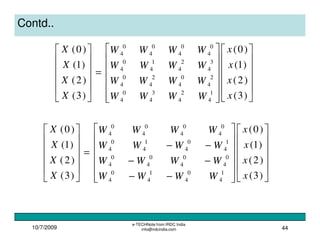
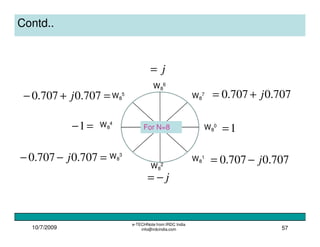
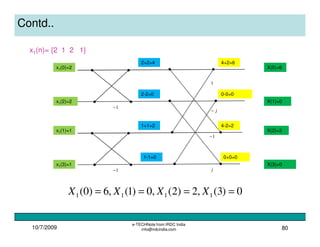
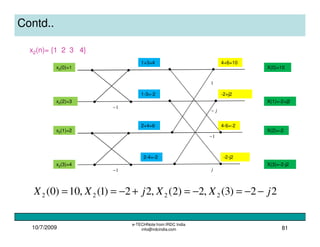
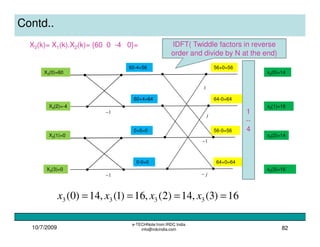
Contd..
Circular shift property
N
kljDFT
N
DFT
ekXlnx
kXnx
π2
].[))((
][][
−
→←−
→←If
then](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-65-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 67
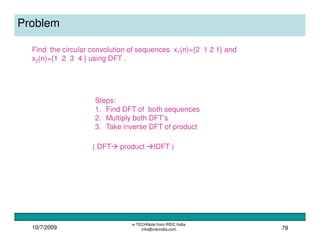
Solution
N
kljDFT
N ekXlnx
π2
].[))((
−
→←−
x(n)= { 1 2 3 4} }22,2,22,10{)( jjkX −−−+−=
Circular shift DFT property
l = 2 4
22
].[))2(()( 4
kjDFT
ekXnxnh
π−
→←−=
x(n) = h((n-2))4h(n)={ 3 4 1 2}
}1111{)( 4
22
−−==
− kj
ekc
π
}22,2,22,10{)( jjkH +−−=](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-67-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 68
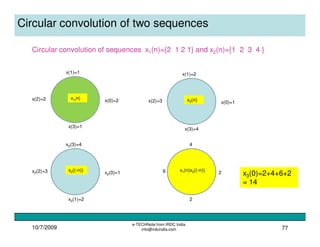
4) Time Reversal
)())(()())((
][][
kNXkXnNxnx
kXnx
N
DFT
N
DFT
−=− →←−=−
→←If
then
i.e. reversing the N-point sequence in time domain is
equivalent to reversing the DFT sequence](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-68-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 70
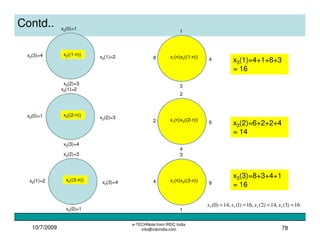
5) Circular frequency shift
N
DFTj
DFT
lkXenx
kXnx
N
nl
))(()(
][][
2
− →←
→←
π
If
then](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-70-320.jpg)
![10/7/2009
e-TECHNote from IRDC India
info@irdcindia.com 76
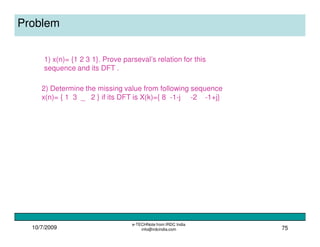
8) Circular Convolution
][][
][][
22
11
kXnx
kXnx
DFT
DFT
→←
→←If
and
then
][].[][][ 2121 kXkXnxnx DFT
→←⊗
where
∑
−
=
−==⊗
1
0
21321 ))(()(][][][
N
k
Nknxkxnxnxnx](https://image.slidesharecdn.com/chapt3frequencyanalysis-130613065236-phpapp02/85/Digital-Signal-Processing-Tutorial-Chapt-3-frequency-analysis-76-320.jpg)


This document provides an overview of frequency analysis techniques for signals and systems, including the Fourier series, Fourier transform, discrete-time Fourier series (DTFS), discrete-time Fourier transform (DTFT), and discrete Fourier transform (DFT). It discusses properties and applications of these techniques, such as analyzing periodic and aperiodic signals. Examples are provided to illustrate calculating the Fourier series and transform of simple signals. The document also covers sampling theory and the Nyquist criterion for proper reconstruction of signals from samples.