The document provides an overview of global and detailed routing in VLSI design. It discusses how global routing determines routing regions and channels while minimizing congestion and meeting timing constraints. Detailed routing then determines the exact routes and layers for each net within the given channels. Different routing algorithms are categorized, including graph search, hierarchical, and maze routing approaches. Concepts like grids, edge capacities, and Steiner trees are also summarized.
![References and Copyright
(cont.)
• Slides used: (Modified by Shantanu Dutt when necessary)
– [©Sarrafzadeh] © Majid Sarrafzadeh, 2001;
Department of Computer Science, UCLA
– [©Sherwani] © Naveed A. Sherwani, 1992
(companion slides to [She99])
– [©Keutzer] © Kurt Keutzer, Dept. of EECS,
UC-Berekeley
http://www-cad.eecs.berkeley.edu/~niraj/ee244/index.htm
– [©Gupta] © Rajesh Gupta
UC-Irvine
http://www.ics.uci.edu/~rgupta/ics280.html
– [©Kang] © Steve Kang, UIUC http://www.ece.uiuc.edu/ece482/
– [©Bazargan] © Kia Bazargan](https://image.slidesharecdn.com/channelrouting-151102104536-lva1-app6892/75/Channel-routing-2-2048.jpg)
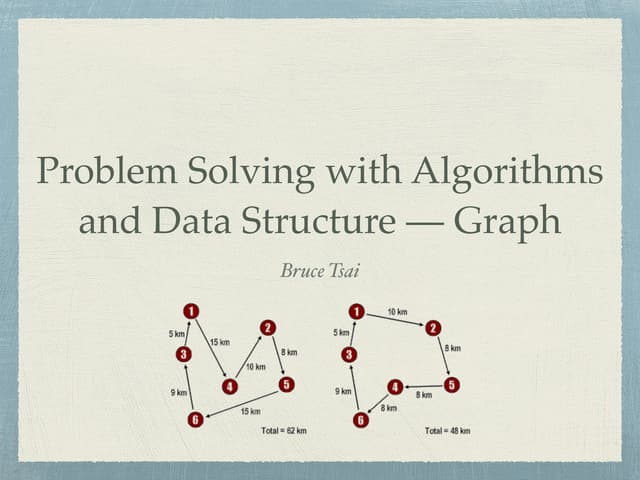
![Global vs. Detailed Routing
• Global routing
– Input: detailed placement, with exact terminal
locations
– Determine “channel” (routing region) for each
net
– Objective: minimize area (congestion), and
timing (approximate)
• Detailed routing
– Input: channels and approximate routing from
the global routing phase
– Determine the exact route and layers for each
net
– Objective: valid routing, minimize area
(congestion), meet timing constraints
– Additional objectives: min via, power
Figs. [©Sherwani]](https://image.slidesharecdn.com/channelrouting-151102104536-lva1-app6892/75/Channel-routing-5-2048.jpg)
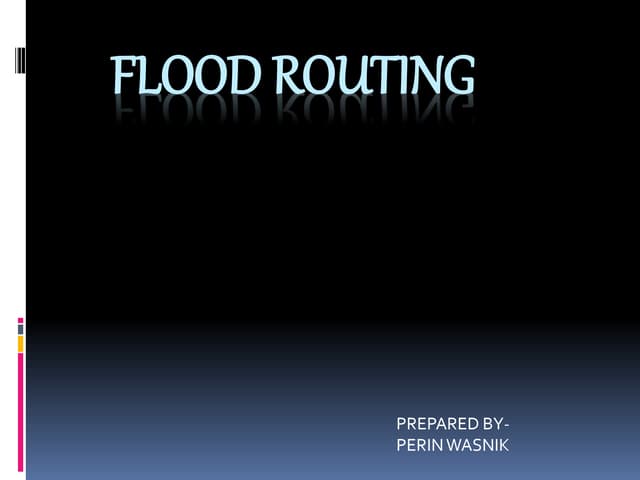
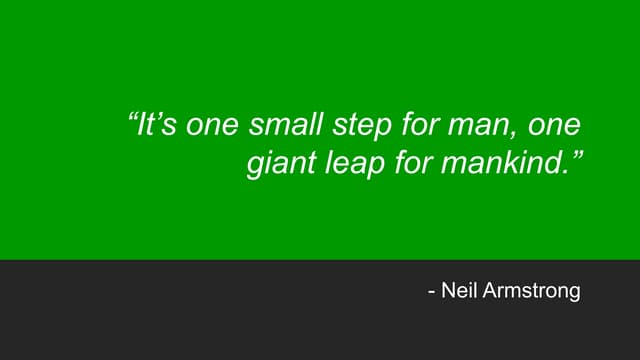
![Taxonomy of VLSI Routers
[©Keutzer]
Graph Search
Steiner
Iterative
Hierarchical Greedy Left-Edge
River
Switchbox
Channel
Maze
Line Probe
Line Expansion
Restricted
General
Purpose
Clock
Specialized
Power/Gnd
Routers
DetailedGlobal
Maze](https://image.slidesharecdn.com/channelrouting-151102104536-lva1-app6892/75/Channel-routing-6-2048.jpg)
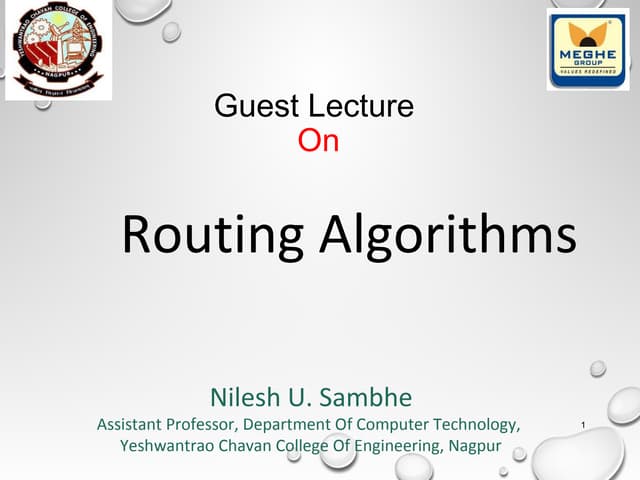
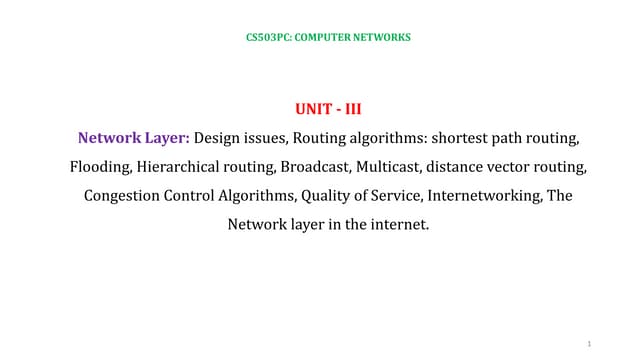
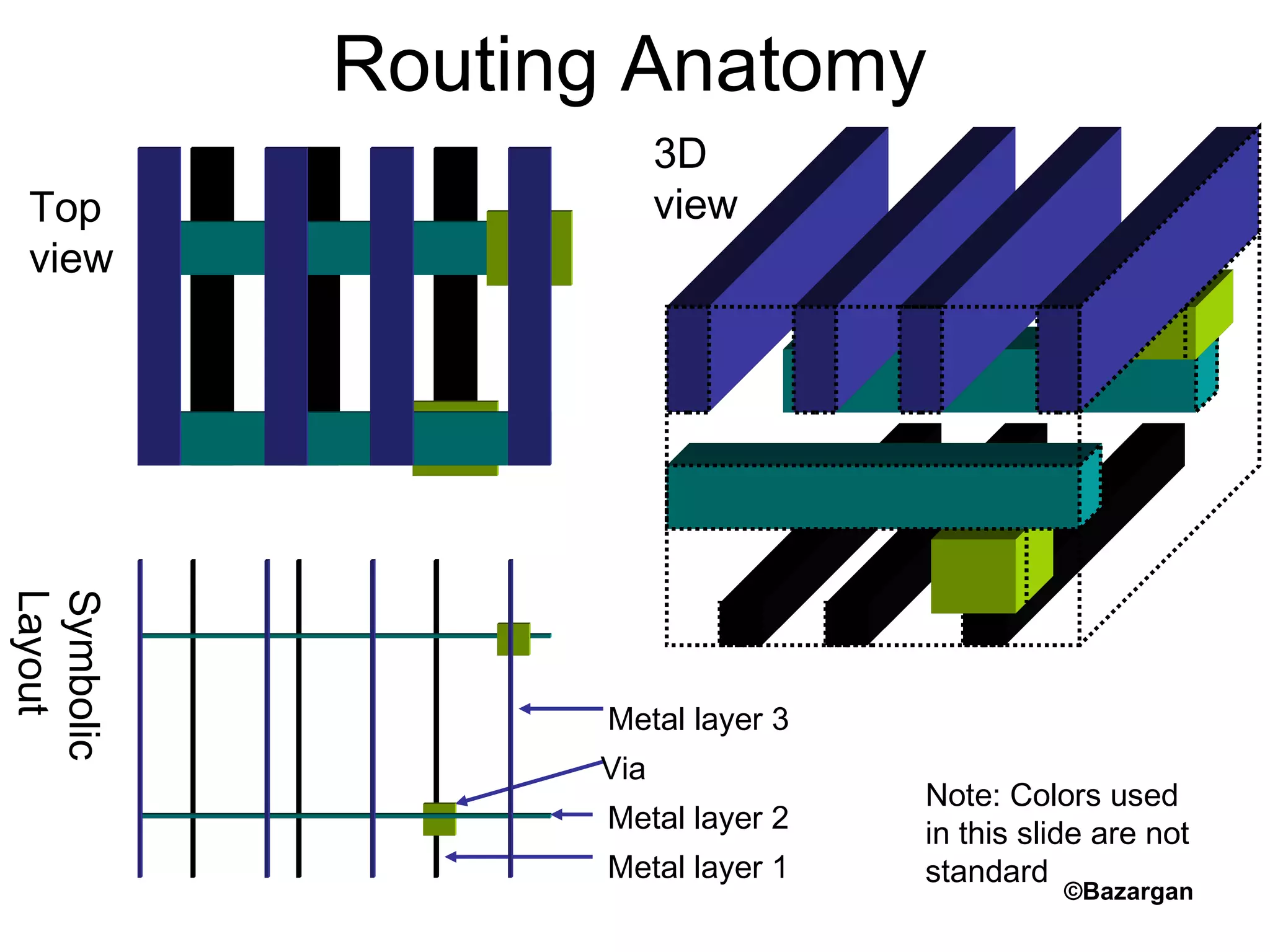
![Global Routing
• Stages
– Routing region definition
– Routing region ordering
– Steiner-tree / area routing
• Grid
– Tiles super-imposed on placement
– Regular or irregular
– Smaller problem to solve,
higher level of abstraction
– Terminals at center of grid tiles
• Edge capacity
– Number of nets that can pass a certain
grid edge (aka congestion)
– On edge Eij,
Capacity(Eij) ≥ Congestion(Eij)
• Steiner routing is generally performed on the
routing graph using edge lengths as cost and
considering edge capacities
M1
M2
M3
[©Sarrafzadeh]](https://image.slidesharecdn.com/channelrouting-151102104536-lva1-app6892/75/Channel-routing-7-2048.jpg)
![Grid Graph
• Course or fine-grain
• Vertices: routing regions, edges: route exists?
• Weights on edges
– How costly is to use that edge
– Could vary during the routing (e.g., for congestion)
– Horizontal / vertical might have different weights
[©Sherwani]
t1 t2 t3
t4
t1 t2 t3
t4
1 1 1
1 1 1
2 2 1 1
t1 t3
t4
t2](https://image.slidesharecdn.com/channelrouting-151102104536-lva1-app6892/75/Channel-routing-8-2048.jpg)