Downloaded 349 times
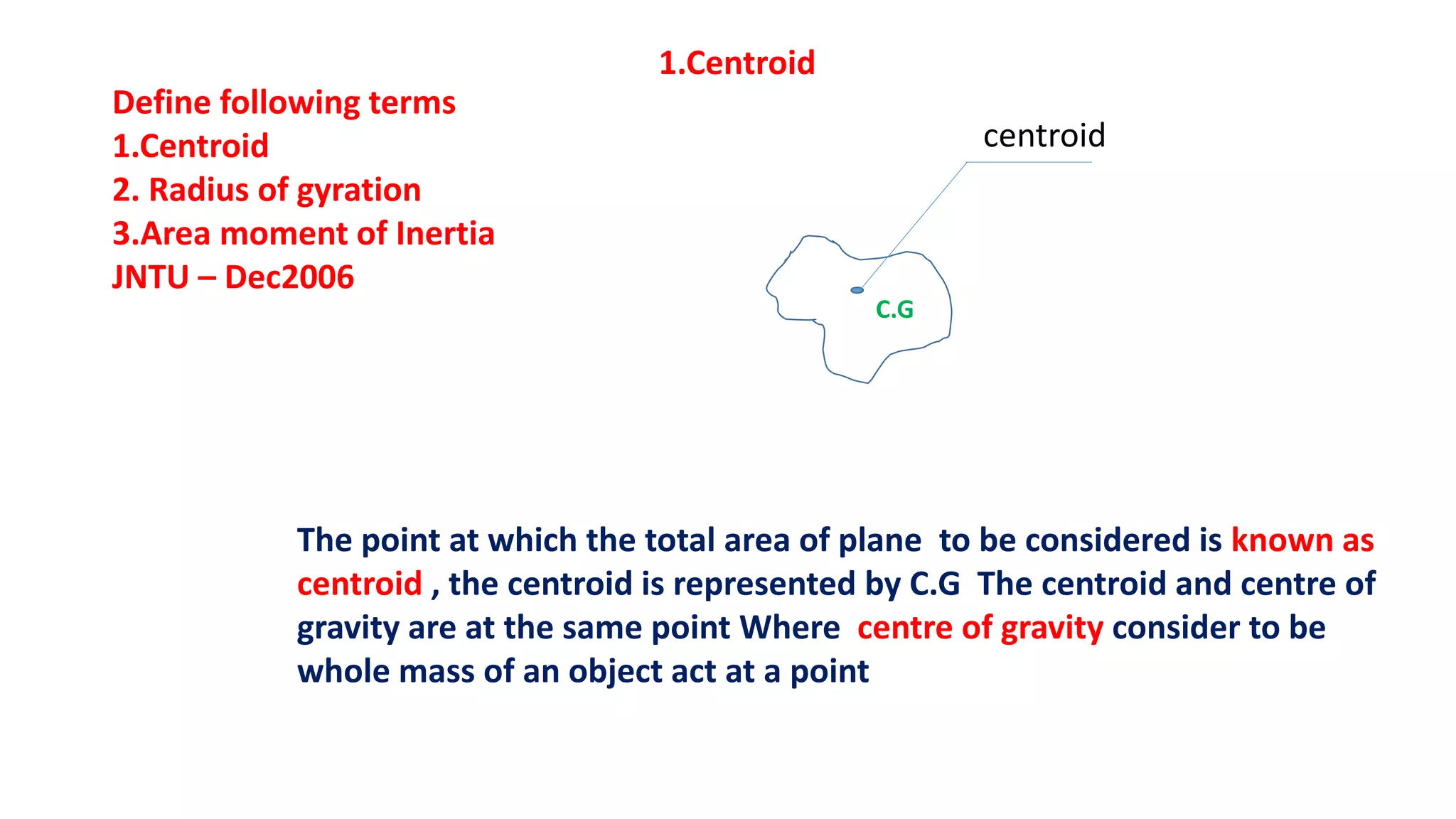
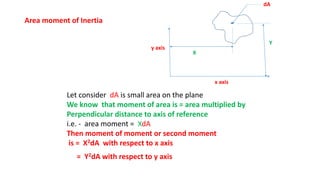
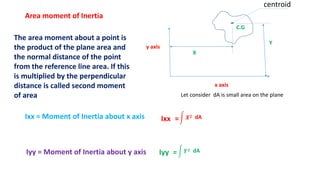
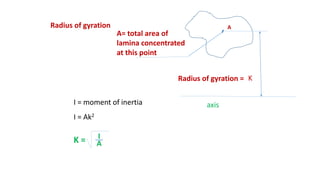
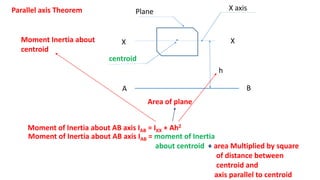
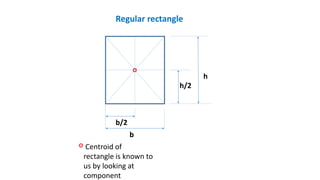
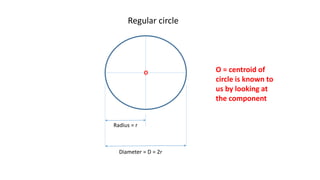
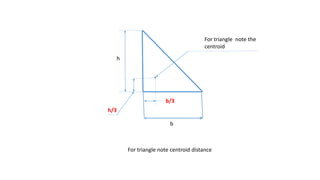
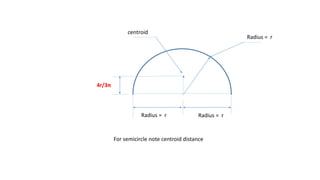
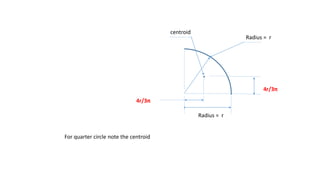
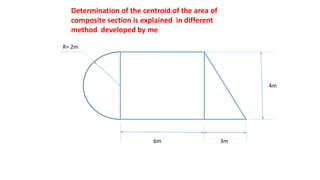
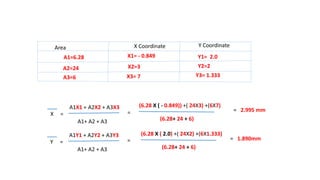
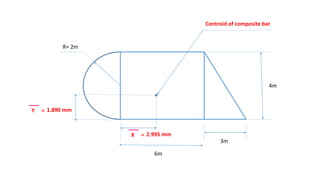
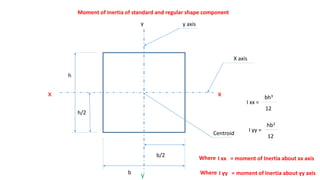
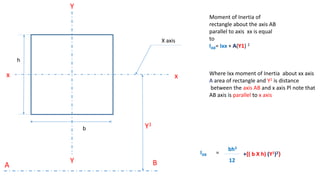
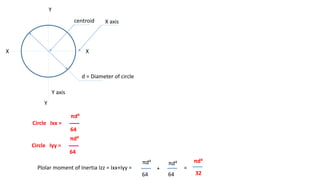
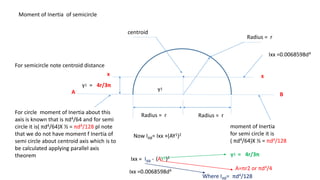
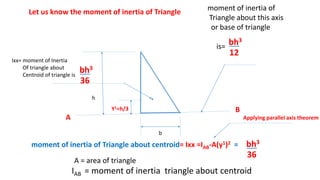
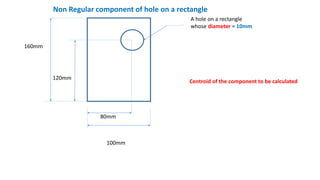
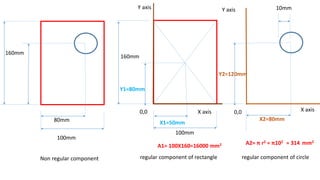
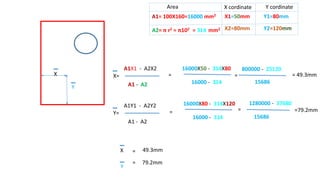
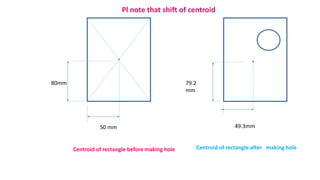
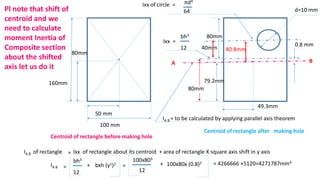
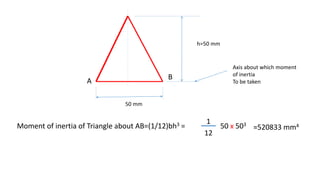
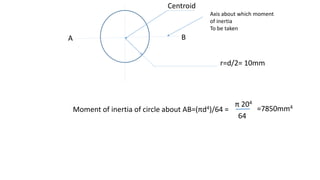
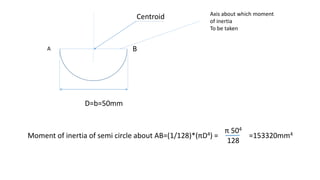
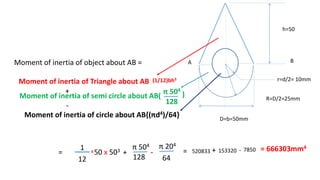

The document defines several terms: 1. Centroid - The point at which the total area of a plane is concentrated. It is where the average position of the total weight of the plane would balance. 2. Radius of gyration - The distance from the axis of rotation to the centroid. It is calculated as the square root of the moment of inertia divided by the total area. 3. Area moment of inertia - The product of the plane area and the square of the perpendicular distance to the axis of reference. It is a measure of the resistance offered by a plane figure to bending or twisting about an axis.






















































































