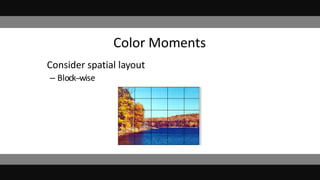
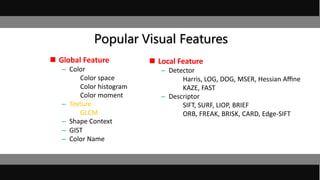
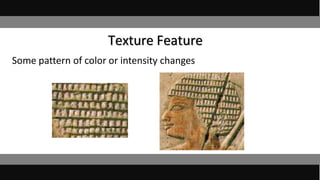
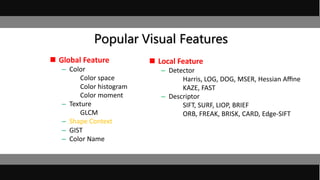
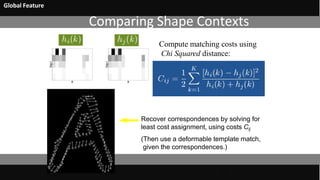
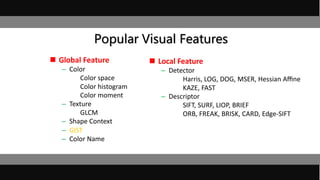
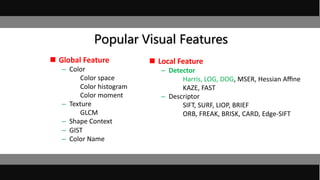
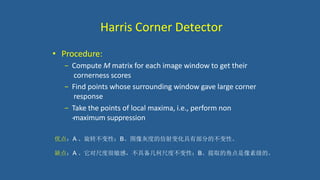
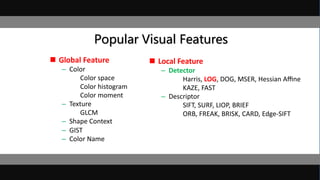
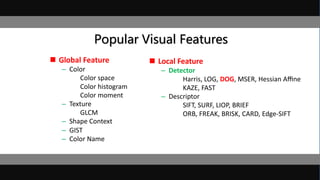
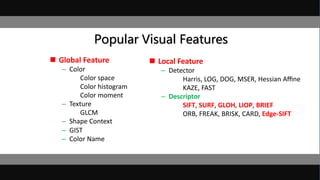
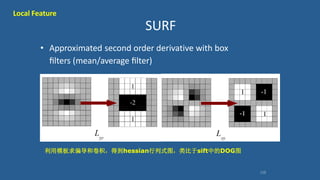
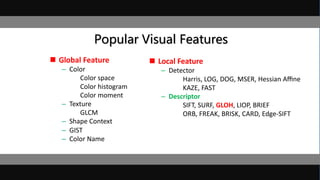
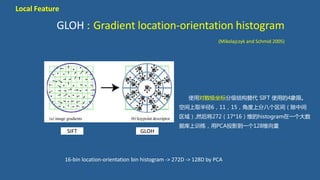
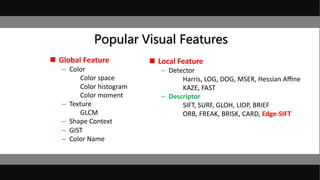
This document discusses various image features that can be used for large-scale visual search and content-based image retrieval (CBIR). It describes both high-level semantic features and low-level visual features that can be extracted from images. For low-level features, it outlines several popular global features like color histograms, color moments, texture descriptors using gray-level co-occurrence matrices (GLCM), shape context, and GIST. It also discusses commonly used local feature detectors like Harris corner detector, SIFT, and descriptors like SIFT, SURF, BRIEF.
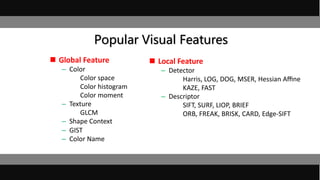

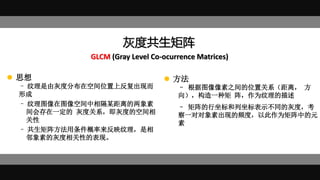
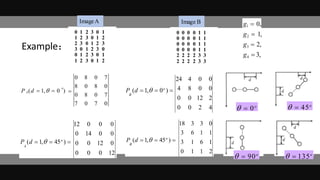
![• The GLCM is defined by:
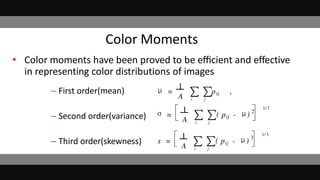
– wherenij is the number of occurrences of the pixel
values lying at distance d with angle in the image.
– The co-occurrence matrix P has dimension n x n,
where n is the number of gray levels in the image.
P(p,q,d,) nij
#{[(x , y ),(x , y )]S | f (x , y ) p & f (x , y ) q}
p(p,q,d,) 1 1 2 2 1 1 2 2
#S
GLCM
(p,q)
nij](https://image.slidesharecdn.com/cbirfeatures-150705141111-lva1-app6892/85/Cbir-features-16-320.jpg)
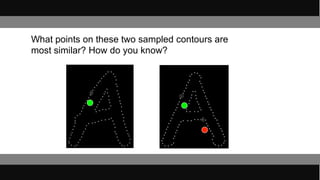
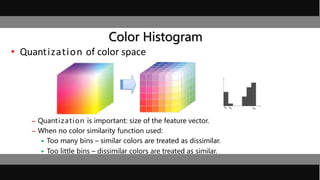
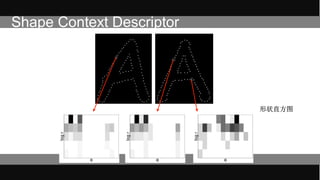
![Shape Context Descriptor [Belongie et al ’02]
20
Shape context slides from Belongie et al.
Count the number of points
inside each bin, e.g.:
Count = 4
Count = 10
Compact representation of
distribution of points relative
to each point
...
NIPS’00, PAMI’02](https://image.slidesharecdn.com/cbirfeatures-150705141111-lva1-app6892/85/Cbir-features-21-320.jpg)
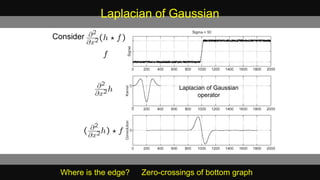
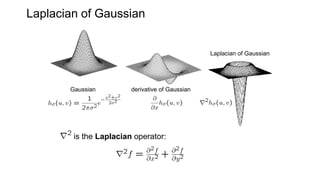
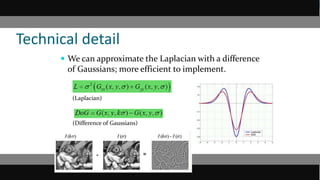
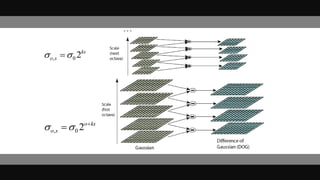
![Laplacian of Gaussian
LoG边缘检测算子是David Courtnay Marr和Ellen Hildreth(1980)共
同提出的[1] 。因此,也称为边缘检测算法或Marr & Hildreth算子。
该算法首先对图像做高斯滤波,然后再求其拉普拉斯(Laplacian)二阶导
数。即图像与 Laplacian of the Gaussian function 进行滤波运算。最后,
通过检测滤波结果的零交叉(Zero crossings)可以获得图像或物体的边
缘。因而,也被业界简称为Laplacian-of-Gaussian (LoG)算子。](https://image.slidesharecdn.com/cbirfeatures-150705141111-lva1-app6892/85/Cbir-features-46-320.jpg)































































![Computer Vision - Unit-II [Repaired].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/computervision-unit-iirepaired-251223052721-8dd262a0-thumbnail.jpg?width=640&height=640&fit=bounds)