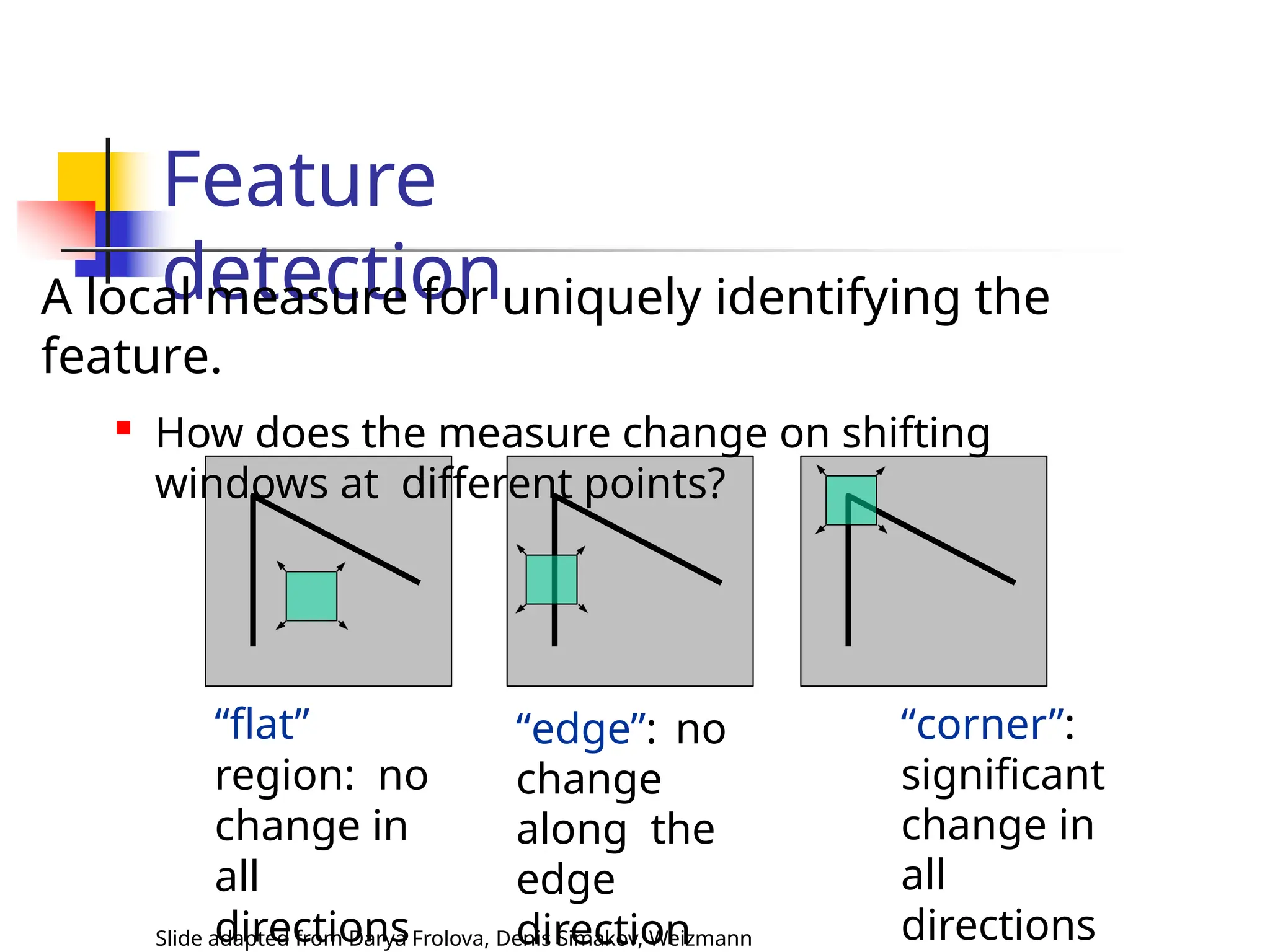
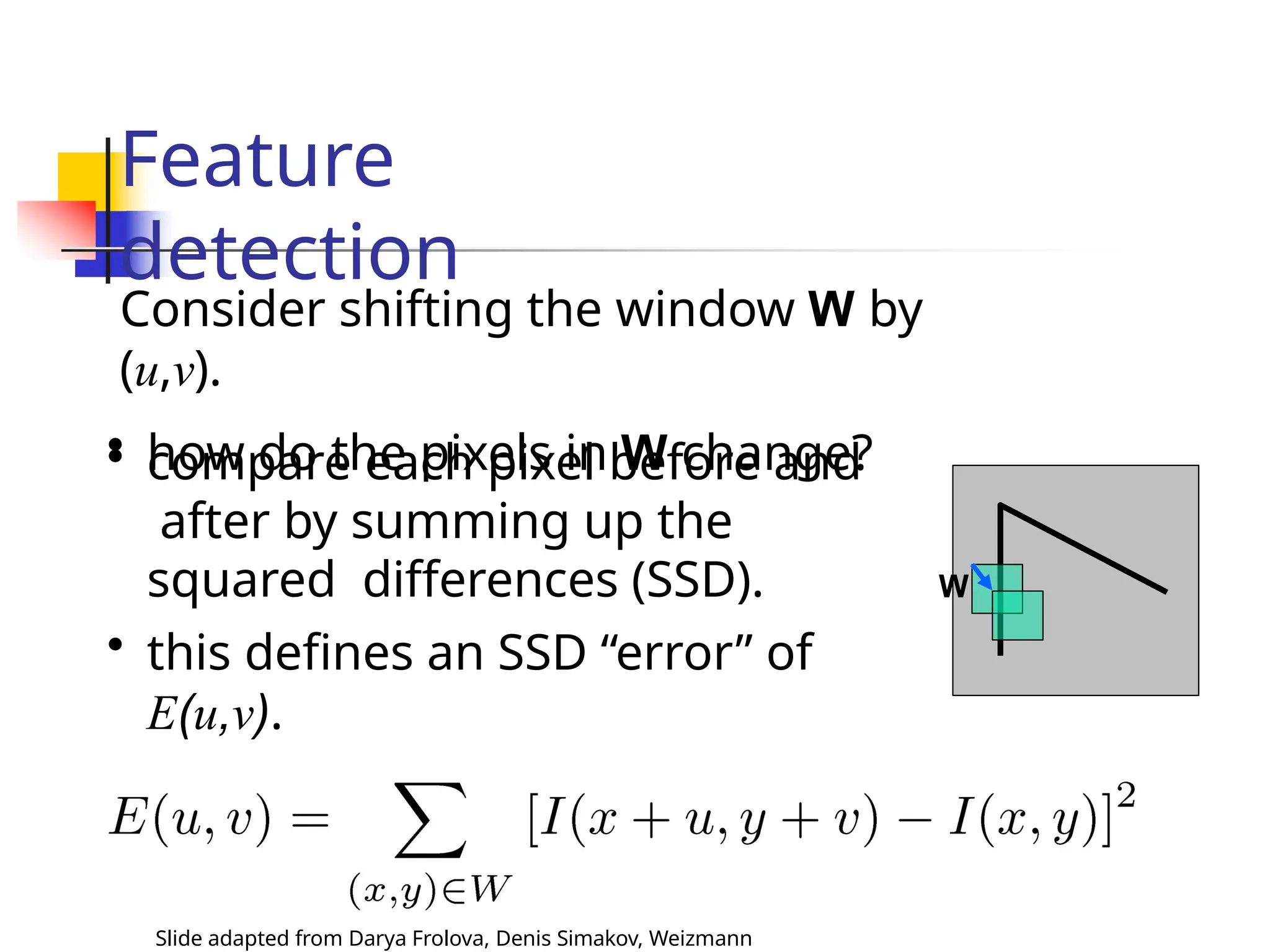
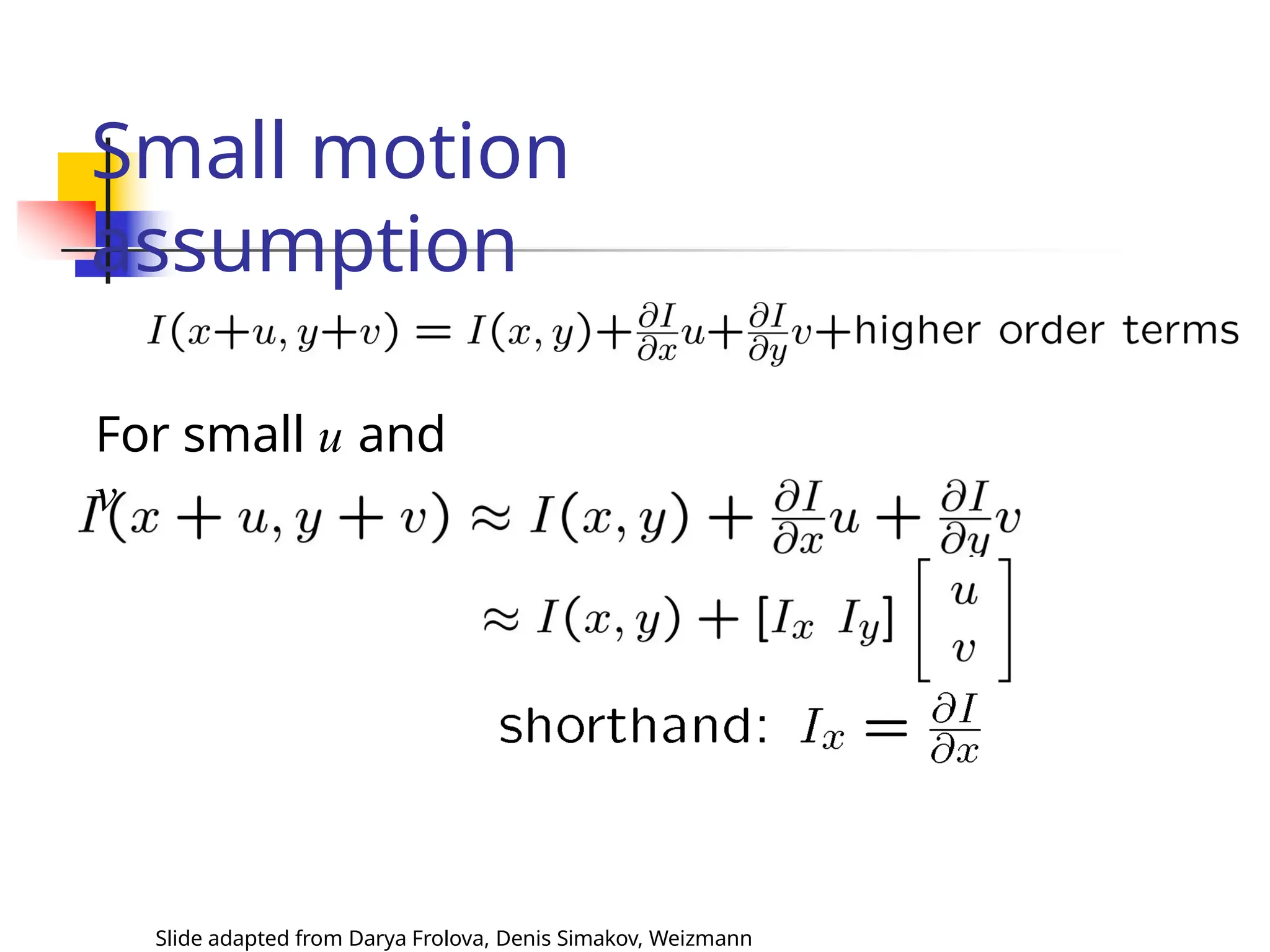
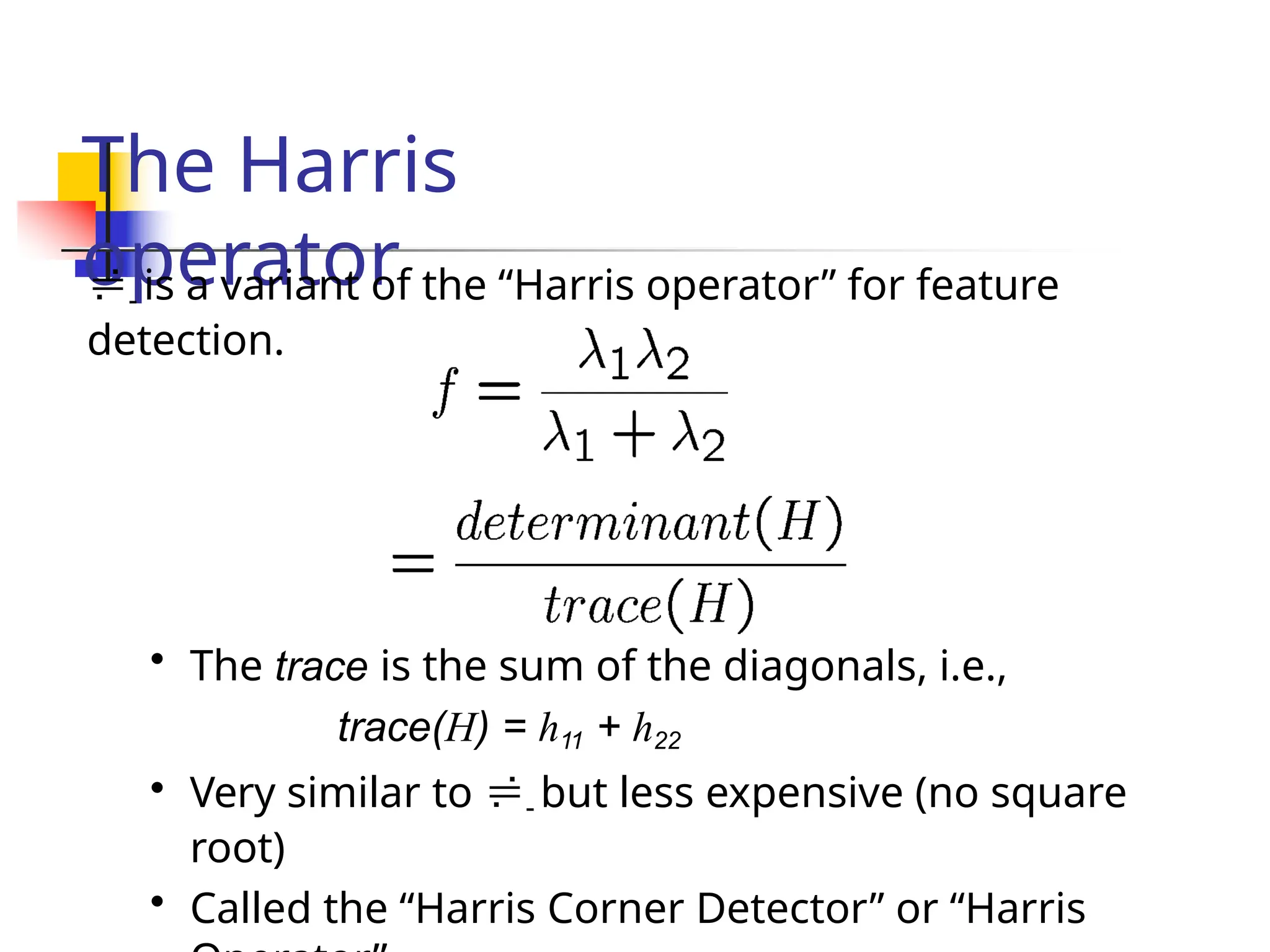
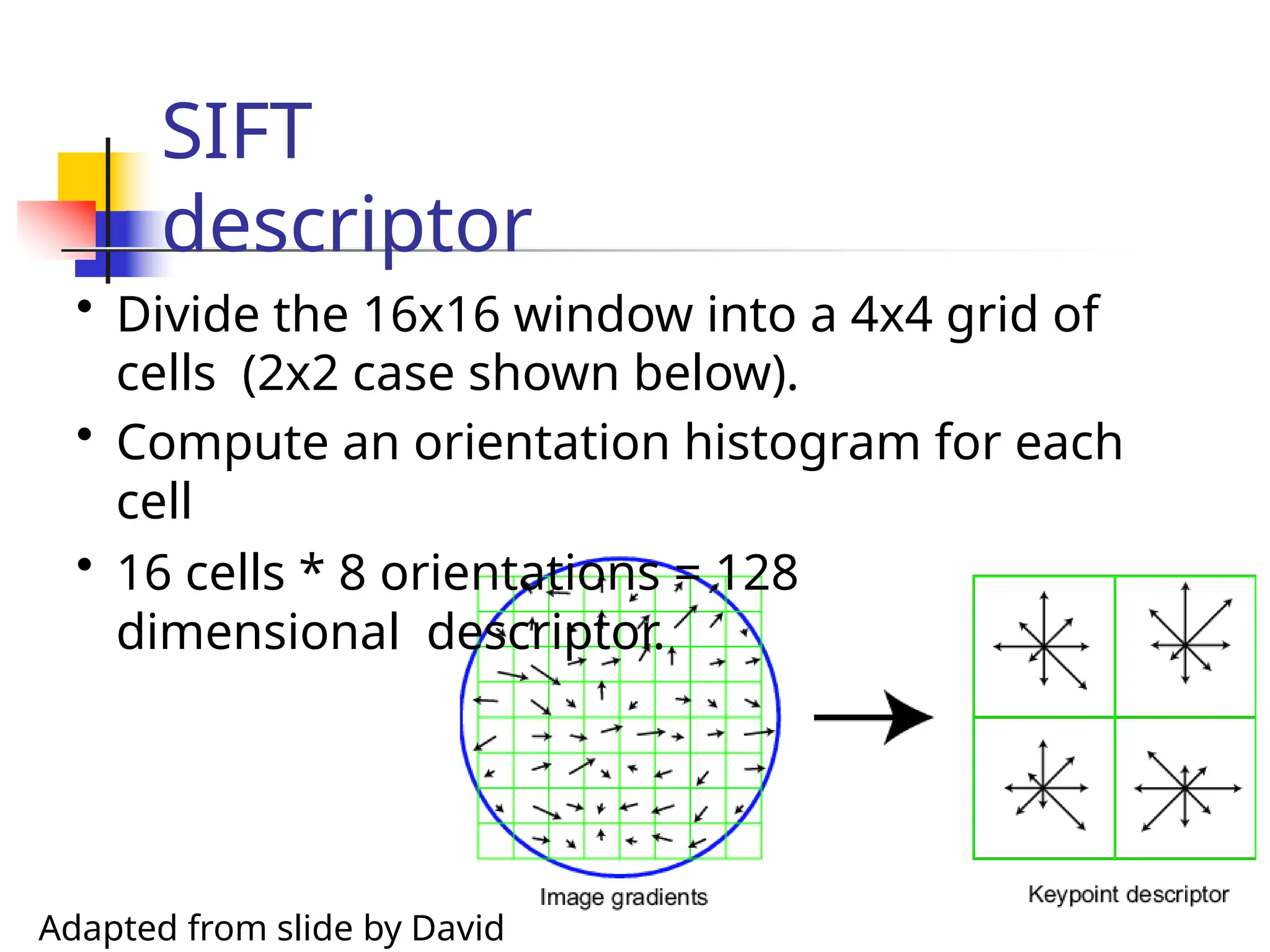
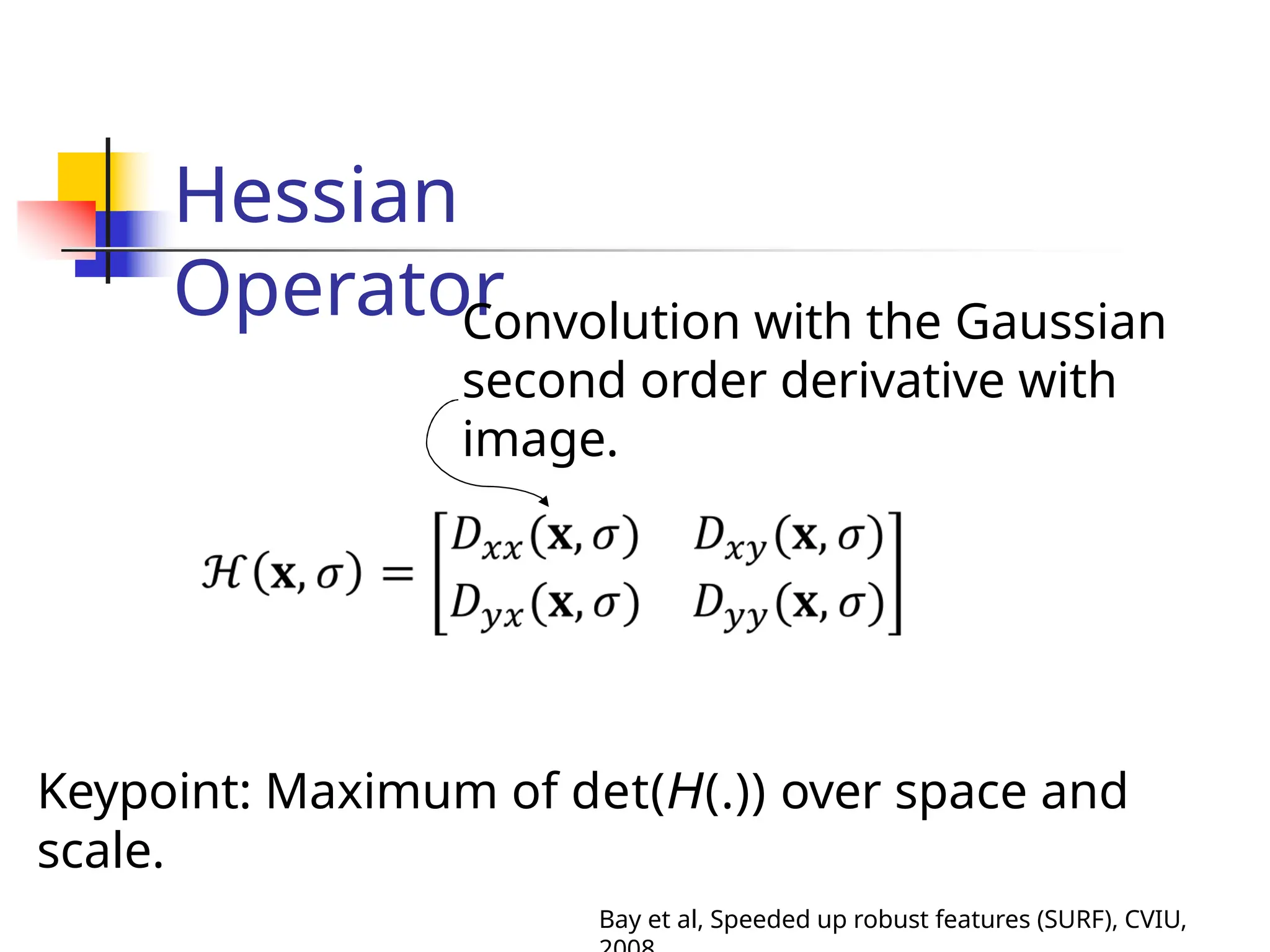
The document discusses feature detection and description in computer vision, focusing on various types of features such as corners, edges, and flat regions. It outlines methods for identifying and matching features between images, including the Harris operator for corner detection and scale-invariant features like SIFT and SURF. Additionally, it covers the importance of invariance to transformations such as translation, rotation, and scale for effective feature matching.


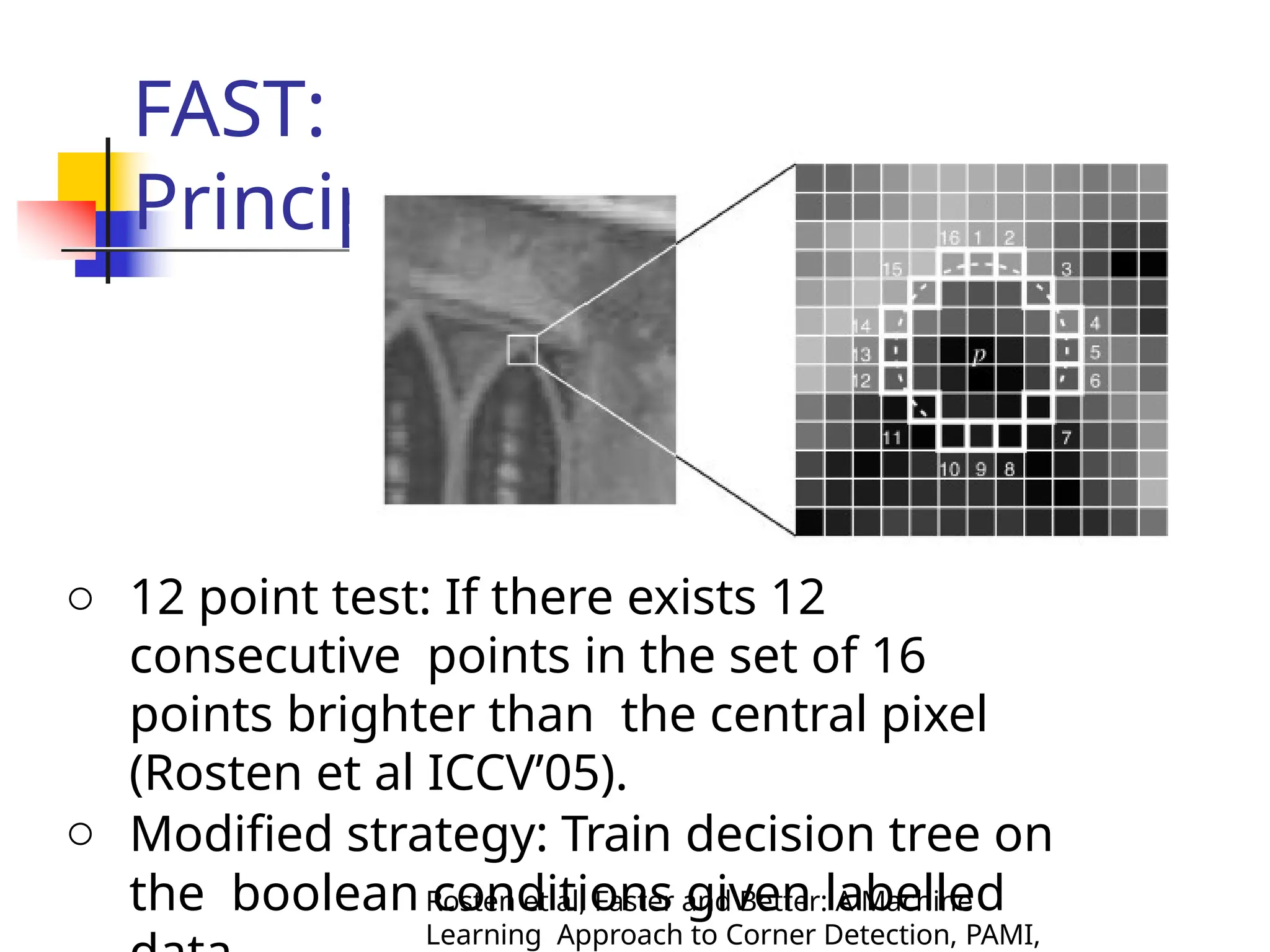
![Quick
eigenvalue/eigenvector
review
The eigenvectors of a matrix A are the vectors x that
satisfy:
The scalar is the eigenvalue corresponding to x
The eigenvalues are found by solving:
For eigen vector solve the following:
Once you know , you find eigen vector [x y]T by solving
the
above Slide adapted from Darya Frolova, Denis Simakov, Weizmann](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-8-2048.jpg)

![Feature scoring
function
Slide adapted from Darya Frolova, Denis Simakov, Weizmann
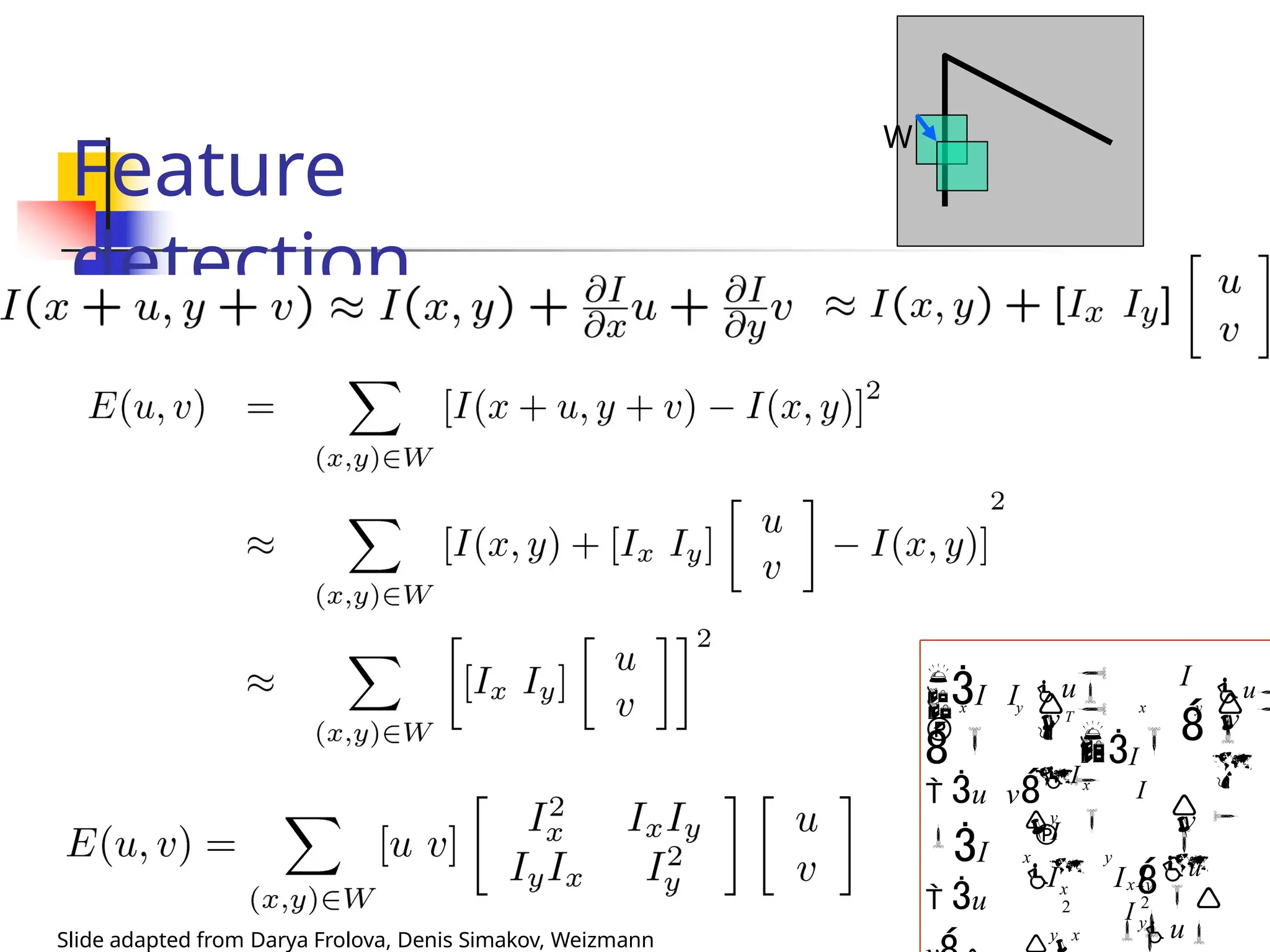
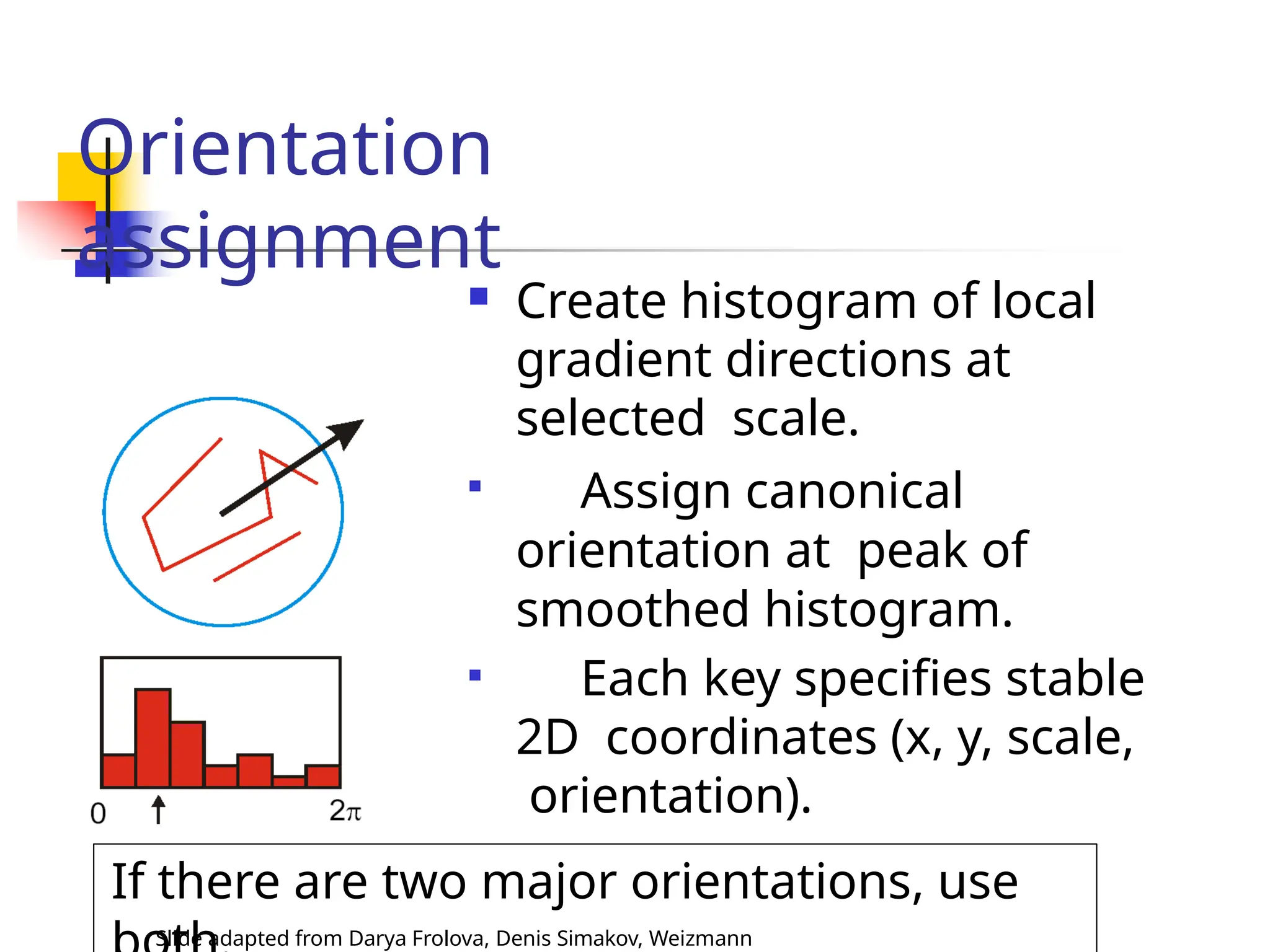
E(u,v) to be large for small shifts in all
directions
• the minimum of E(u,v) should be
large, over all unit vectors [u v].
• this minimum is given by the
smaller eigenvalue (-) of H](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-10-2048.jpg)

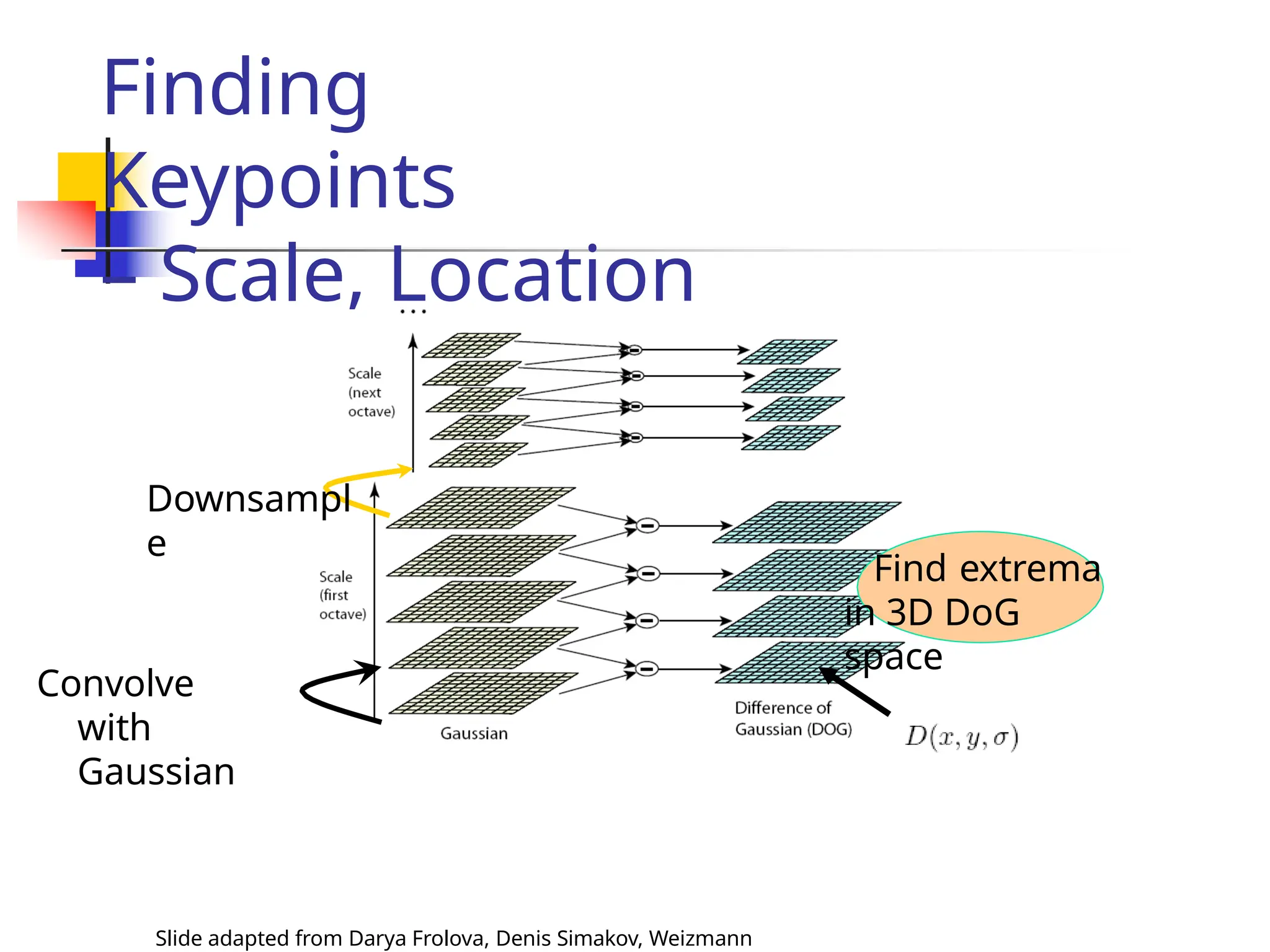
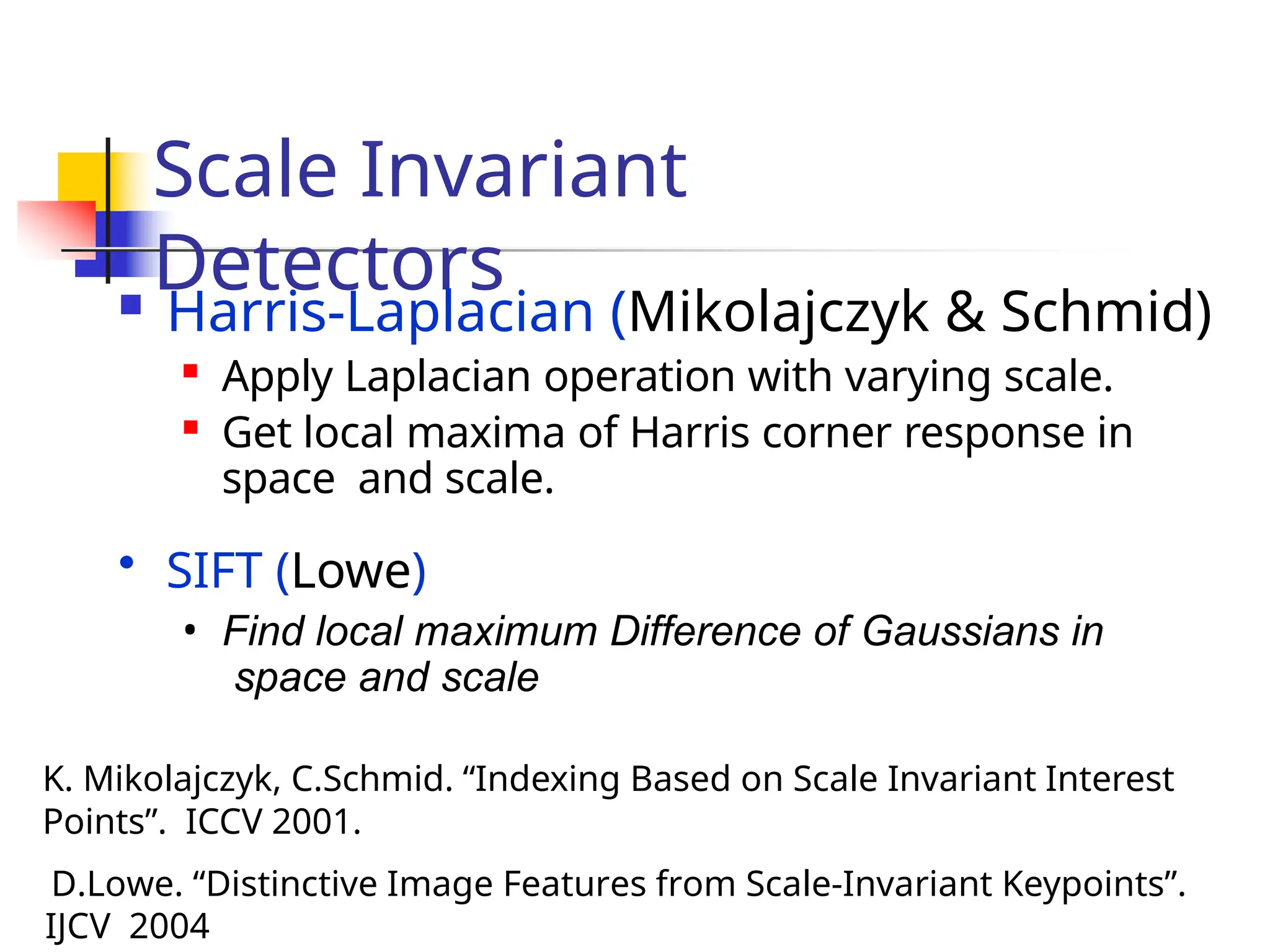
![Scale Invariant
Detection: Summary
Slide adapted from Darya Frolova, Denis Simakov, Weizmann
Given: two images of the same scene with a large
scale difference between them.
Goal: find the same interest points
independently in each image.
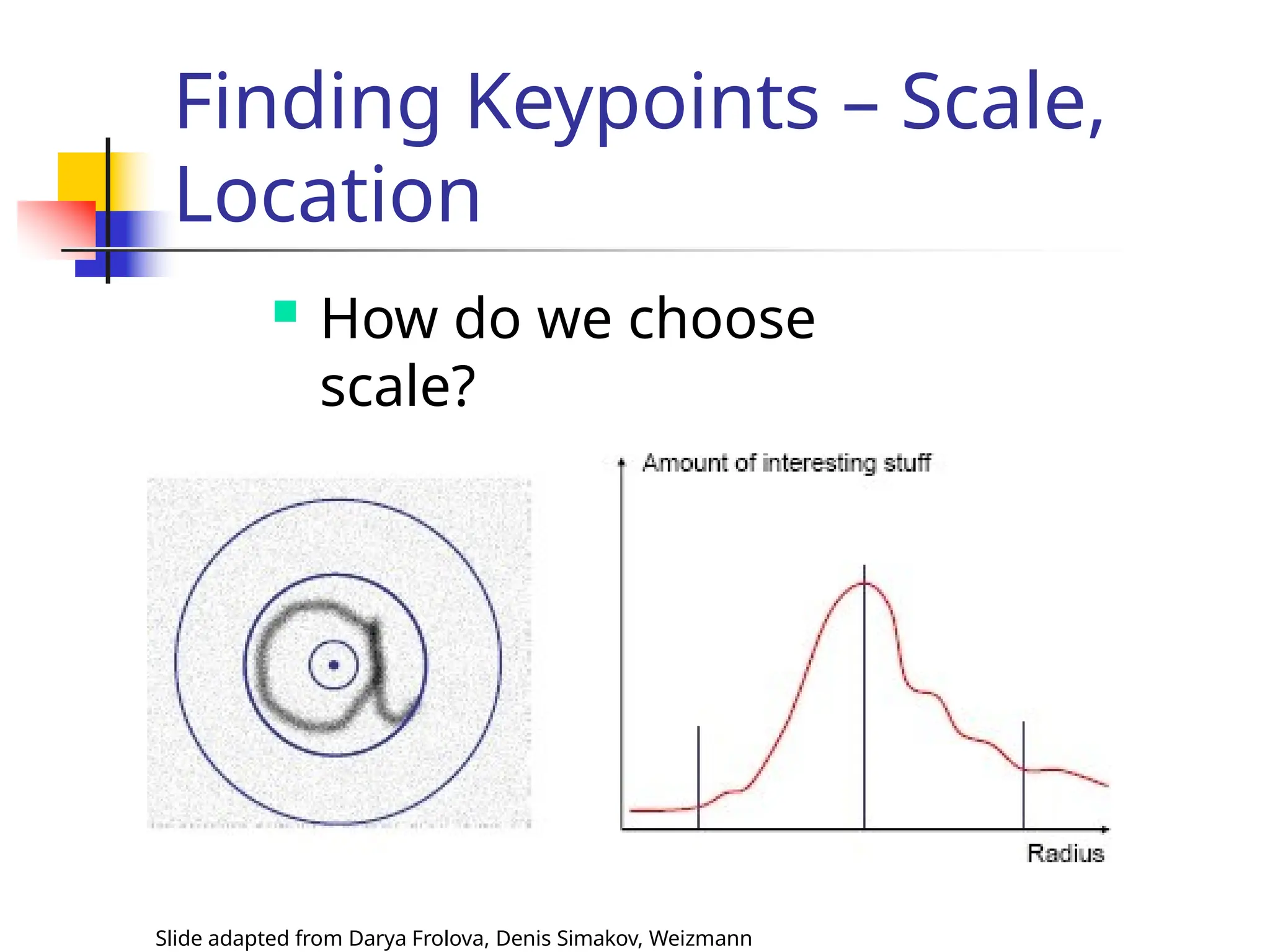
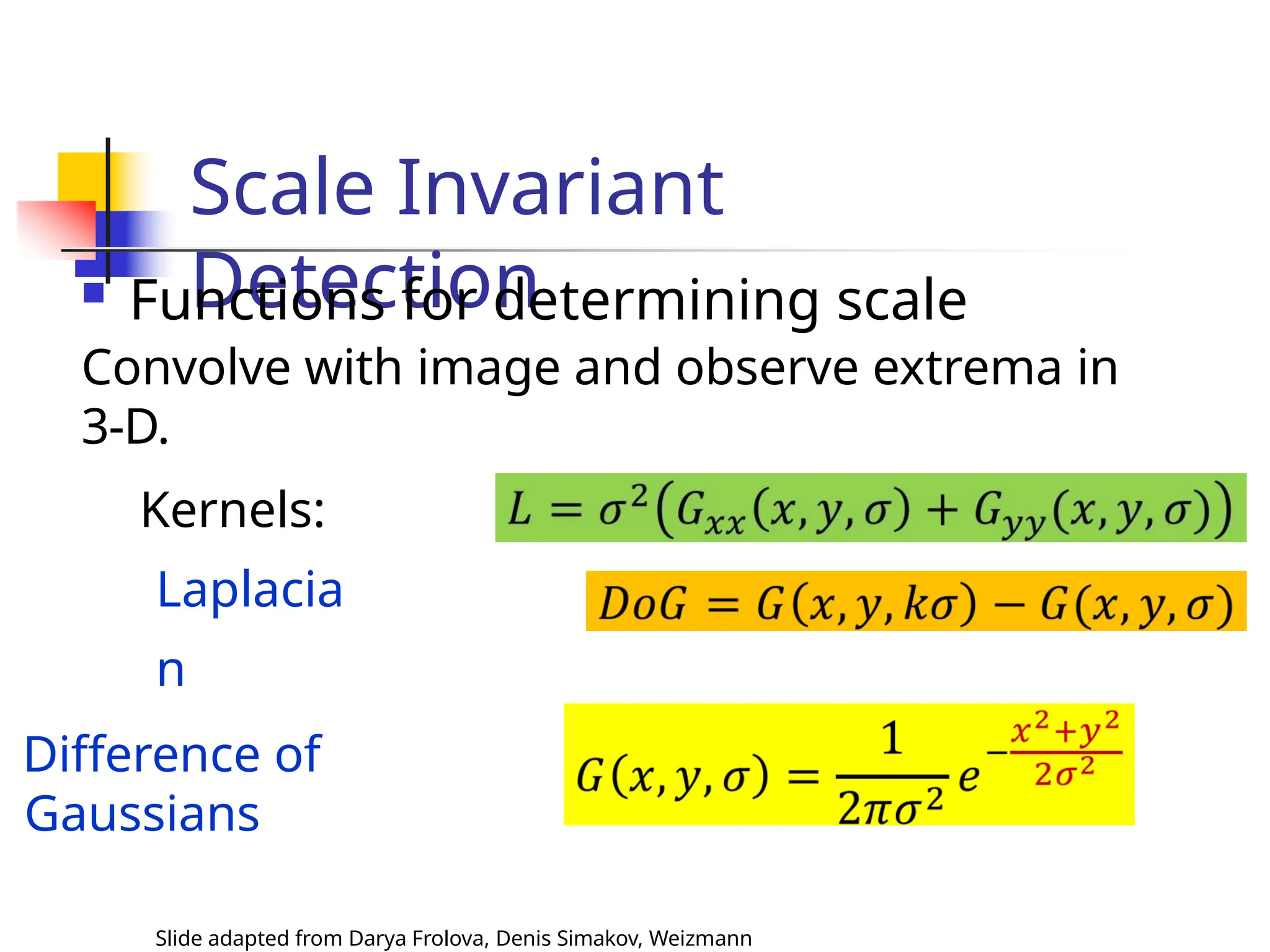
Solution: search for maxima of suitable
functions in
scale and in space (over the image).
Methods:
1. Harris-Laplacian [Mikolajczyk, Schmid]: maximize
Laplacian over scale, Harris’ measure of corner
response over the image.](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-29-2048.jpg)


![Matchin
g
Representation of a key-point by a feature
vector.
e.g. [f0 f1 … fn]T
Use distance functions / similarity measures.
L1 norm
L2
norm
L](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-49-2048.jpg)

![Laws’ texture energy
features
A set of 9 5x5 masks used to
compute
texture energy.
L5 (Level): [1 4 6 4 1]
E5 (Edge): [-1 -2 0 2 1]
S5 (Spot): [-1 0 2 0 -1]
R5 (ripple): [1 -4 6 -4 1]
Computation with
mask: Convolution
A mask: Outer
product of any
pair.
e.g. E5L5: E5.L5T
K. Laws, “Rapid Texture Identification”, in SPIE Vol. 238: Image Processing
for](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-60-2048.jpg)
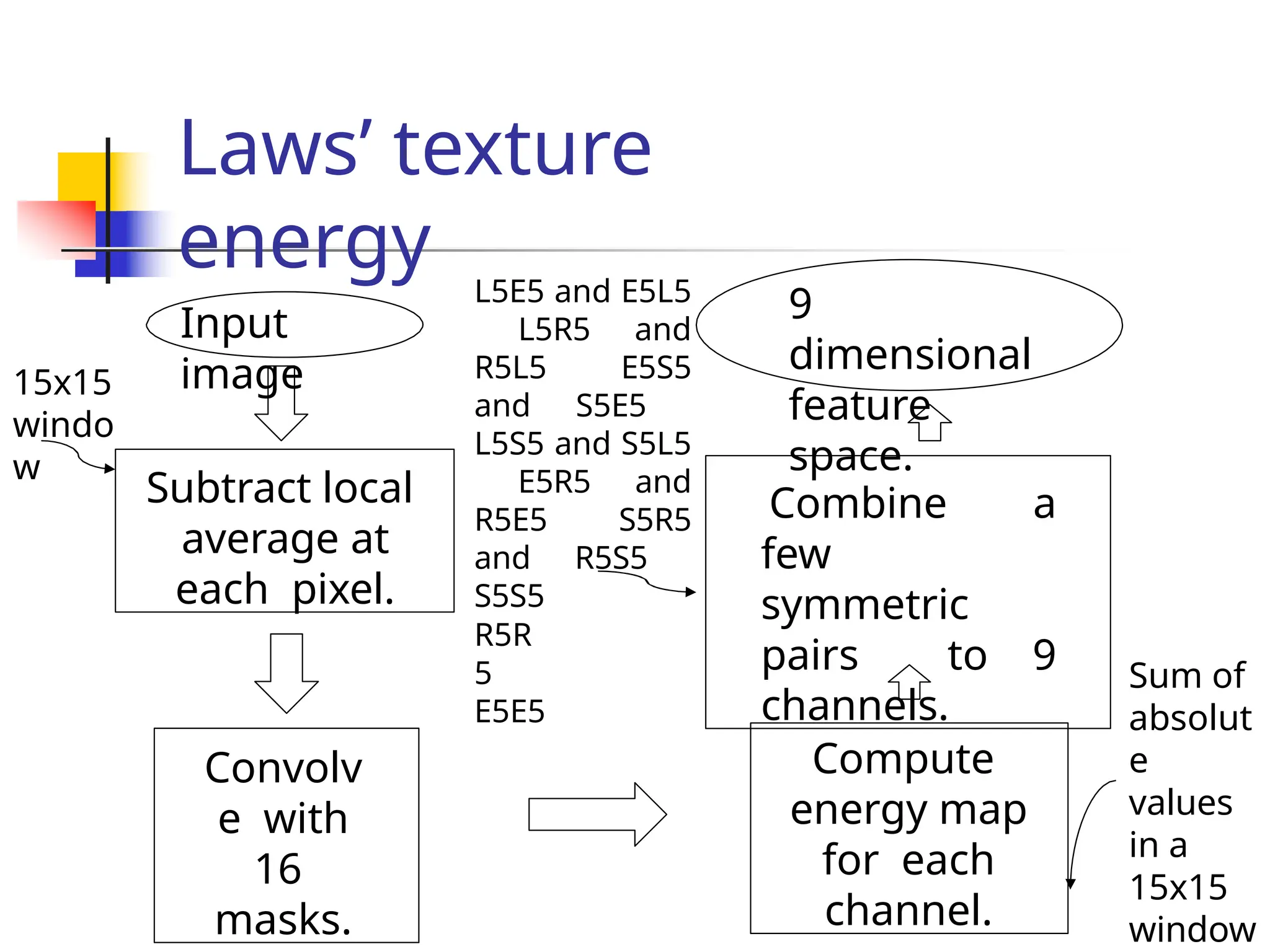
![Laws’ texture energy
features
K. Laws, “Rapid Texture Identification”, in SPIE Vol. 238: Image Processing
for
A set of 9 5x5 masks used to
compute
texture energy.
L5 (Level): [1 4 6 4 1]
E5 (Edge): [-1 -2 0 2 1]
S5 (Spot): [-1 0 2 0 -1]
R5 (ripple): [1 -4 6 -4 1]
16 such masks possible.
Combine a few pairs to make 9
masks.
L5E5 and E5L5
L5R5 and
R5L5 E5S5
and S5E5
L5S5 and S5L5
E5R5 and
R5E5 S5R5
and R5S5
S5S5
R5R
5
E5E5
Take
average
of
response
s of two
masks.](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-61-2048.jpg)
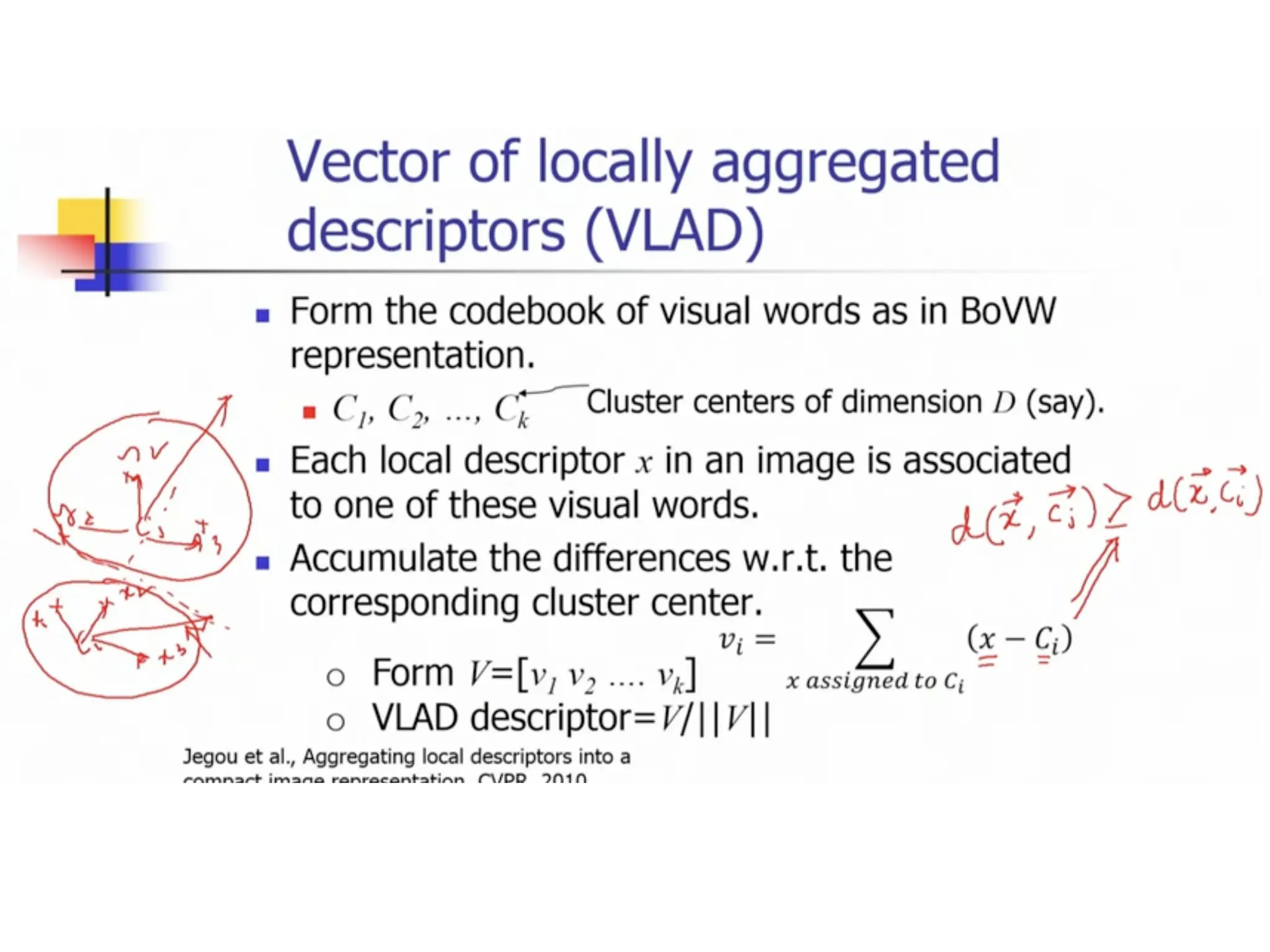
![Vector of locally aggregated
descriptors (VLAD)
Form the codebook of visual words as in
BoVW representation.
C1, C2, …, Ck
Cluster centers of dimension D
(say).
Each local descriptor x in an image is
associated to one of these visual words.
Accumulate the differences w.r.t.
the corresponding cluster center.
o Form V=[v1 v2 …. vk]
o VLAD descriptor=V/||V||
Dimension:
k.D
Jegou et al., Aggregating local descriptors
into a compact image representation, CVPR,](https://image.slidesharecdn.com/unit4part12-241129140109-ad0c6a4d/75/feature-matching-and-model-description-pptx-66-2048.jpg)


































![ANPARA THERMAL POWER STATION[1] sangam.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/anparathermalpowerstation1sangam-251121115219-9261cde4-thumbnail.jpg?width=640&height=640&fit=bounds)














