













![Analog and Digital Motor Control CA06
Chapter 3 Curriculum Manual
38 LJ Technical Systems
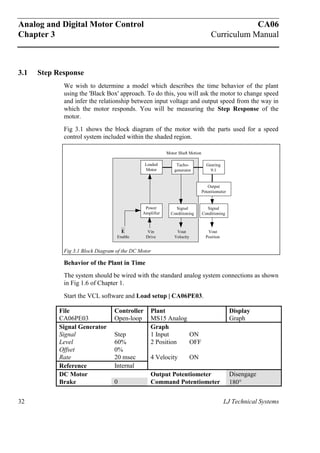
3.2 The First Order Lag
The step response obtained is characteristic of a First Order Time Lag. A first
order lag produces an exponential rise to a step input. Mathematically this is of the
form:
Change in Output = Change in Input x Gain x [ ]1−
−
e
t
τ
Eqn 3.1
where e is the exponential (or natural) number 2.7183... . τ is called the Time
Constant and, with the Gain, fully characterizes a first order lag. t1, t2 and t3 are
measured estimates of this time constant.
To check that the measured step response is an exponential, or close to it, the
computer can plot the response of an ideal curve over the measured one.
Click on Plant | Servo. The Plant has changed to a simulation of a servomotor
such as the MS15. In the top box of the plant area, set Kp equal to the gain you
have measured. In the next lower box enter the value of time constant measured (in
milliseconds) then click in the Overlay box alongside the plant area. Note that for
the overlay feature to be of use the magnify feature must be set to x1.
This will show you the measured response of the motor (purple) and the response
of an exponential (light green) having the Gain and Time Constant you have
measured. The values of gain and time constant can be changed and the graph
redrawn until you have a good fit between the experimental data and the response
of the theoretical model. The values of Gain and Time Constant set are the
parameters which can be used to model the plant.
The two traces will not be an exact match owing to nonlinearities in the electronics
and mechanics (such as deadband in the drive amplifier, or static bearing friction)
but should be close enough for you to see that the response of the motor speed to a
step input can be represented by an exponential function.
The two parameters that define the model are
Gain and Time Constant.
Gain (K) is the Steady State relationship between input and output.
Time Constant (τ) defines the Transient Time.](https://image.slidesharecdn.com/ca06sample-130818050924-phpapp02/85/EEP301-Ca06-sample-16-320.jpg)
![CA06 Analog and Digital Motor Control
Curriculum Manual Chapter 3
LJ Technical Systems 39
From Table 3.2, the control model parameters for the motor, under no
load conditions are:
Gain (K) = Time Constant (ττττ) = seconds
3.2a Is there an adequate match between the measured motor response and the
response of the theoretical model?
Yes or No
3.2b Which of the following would not contribute to the discrepancies between
actual and theoretical results?
a Static friction in the bearings.
b Viscous friction in the bearings.
c Error in measuring gain and time constant.
d Deadband in the drive amplifier.
3.3 Characteristics of the First Order Exponential Lag
You now know what the exponential curve looks like but how does knowing the
time constant give you a picture of the time behavior of the transient curve?
Value after 1 or more time constants
Use the Windows calculator on the computer to calculate the value of the curve.
Do this at multiples of the time constant.
Using the keying sequence given below, calculate the values of 1−
−
e
t τ
when
t/τ = 0, 1, 2, 3, 4 and 5 and enter the values in Table 3.3.
An exponential is the inverse of the Natural Logarithm ln (ln ≡loge). To calculate
the value the curve has reached after 1 time constant, t = τ or t/τ = 1, use the
Windows calculator key sequence:
1 +/- Inv Ln +/- + 1 = This calculates [ ]1 1
− −
e](https://image.slidesharecdn.com/ca06sample-130818050924-phpapp02/85/EEP301-Ca06-sample-17-320.jpg)
![Analog and Digital Motor Control CA06
Chapter 3 Curriculum Manual
40 LJ Technical Systems
This gives the answer 0.632... . This is where the 63% figure used earlier came
from. After 1 time constant, an exponential response to a step has covered 63.2%
of its total span.
The same keying sequence, but beginning with the other time ratios shown (0, 2, 3,
4 and 5), can be used to calculate the exponential values after 0 and 2 to 5 time
constants.
t/τ 0 1 2 3 4 5
[ ]1−
−
e
t
τ
Table 3.3 Step Response of an exponential lag
From these figures, you can see that a step response will be at a value which is
32.8% (100 - 63.2) of its span away from its final value after 1 time constant, and
0.7% of its span away from its final value after 5 time constants. It can therefore be
assumed that the transient has died out and the response has reached its Steady
State value after 5 time constants.
There is an easier keying sequence. The first result gave us the value at the first
time constant as 0.632 = 1 - 0.368. The value at the nth
time constant is 1 0 368− . n
.
Initial Slope
One of the characteristics of an exponential is that a line drawn at the initial slope
crosses the final value of curve after one time constant. This was used as one of the
methods of measuring the time constant of the motor. It can also be used to sketch
an exponential curve without calculating lots of points along the curve.
Sketching an exponential
We want to show the shape of a response which has the form Y A e
t
==== −−−−
−−−−
1 ττττ
A is an amplitude multiplier. If it is assumed that A = 1 then the amplitude scale
need only be multiplied by the actual value of A.
t
τ
is the time multiplier so it is assumed that τ = 1 and the time scale is multiplied
by the time constant to give the actual time curve. This process is called
normalization.](https://image.slidesharecdn.com/ca06sample-130818050924-phpapp02/85/EEP301-Ca06-sample-18-320.jpg)











This chapter discusses measuring the time response of a plant, specifically a DC motor, to characterize its dynamic behavior. The key aspects covered are: 1. Performing a step response test by applying a step input and measuring the transient and steady-state output. This allows determining the gain and time constant. 2. The transient response is initially dominated by the plant's inertia/storage elements, while the steady-state response is determined by the input. 3. A first-order lag model is commonly used to represent dynamic behavior, with an exponential rise to a step input characterized by the time constant τ. Three methods are presented for estimating τ from step response data.























































































