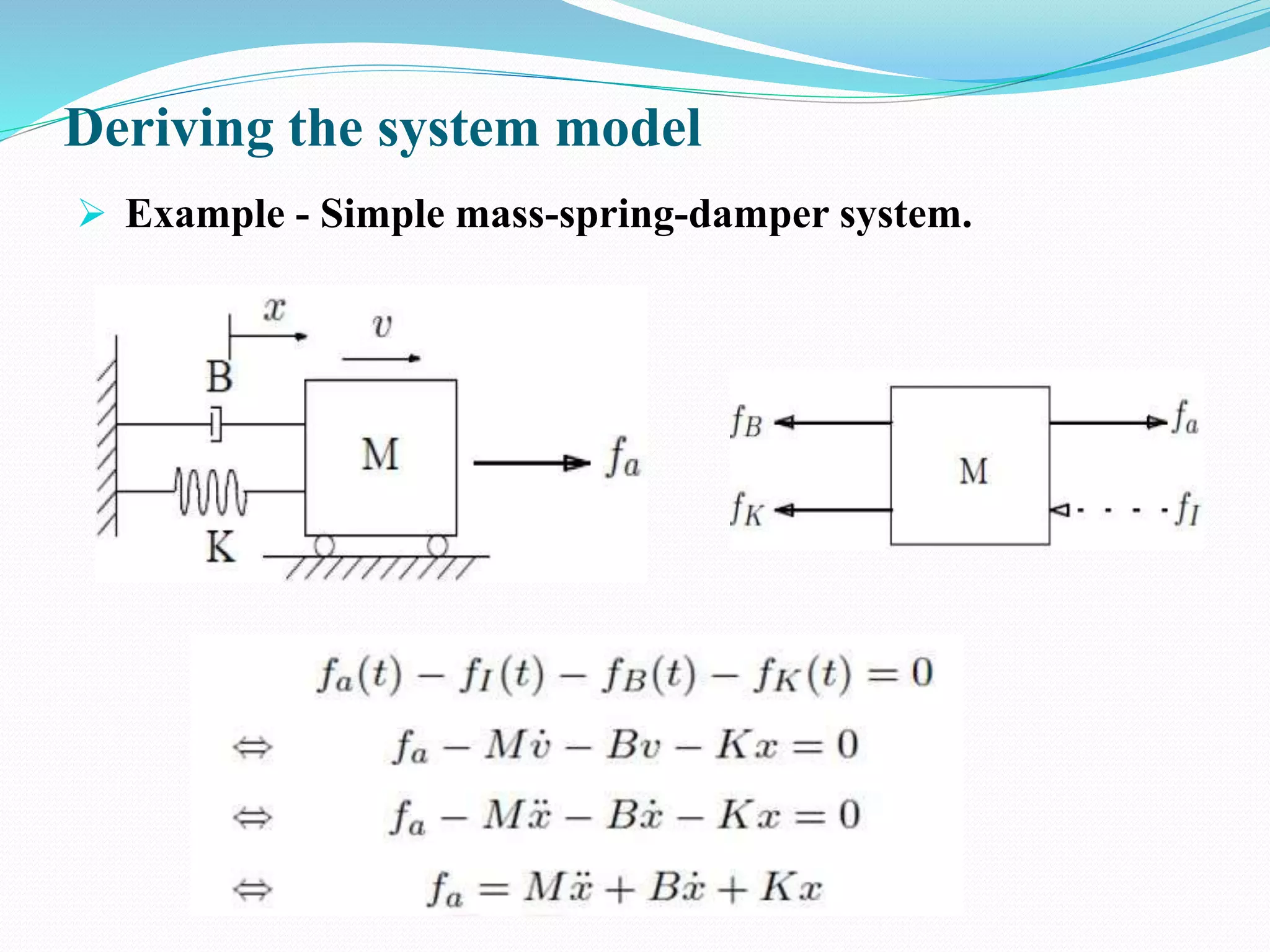
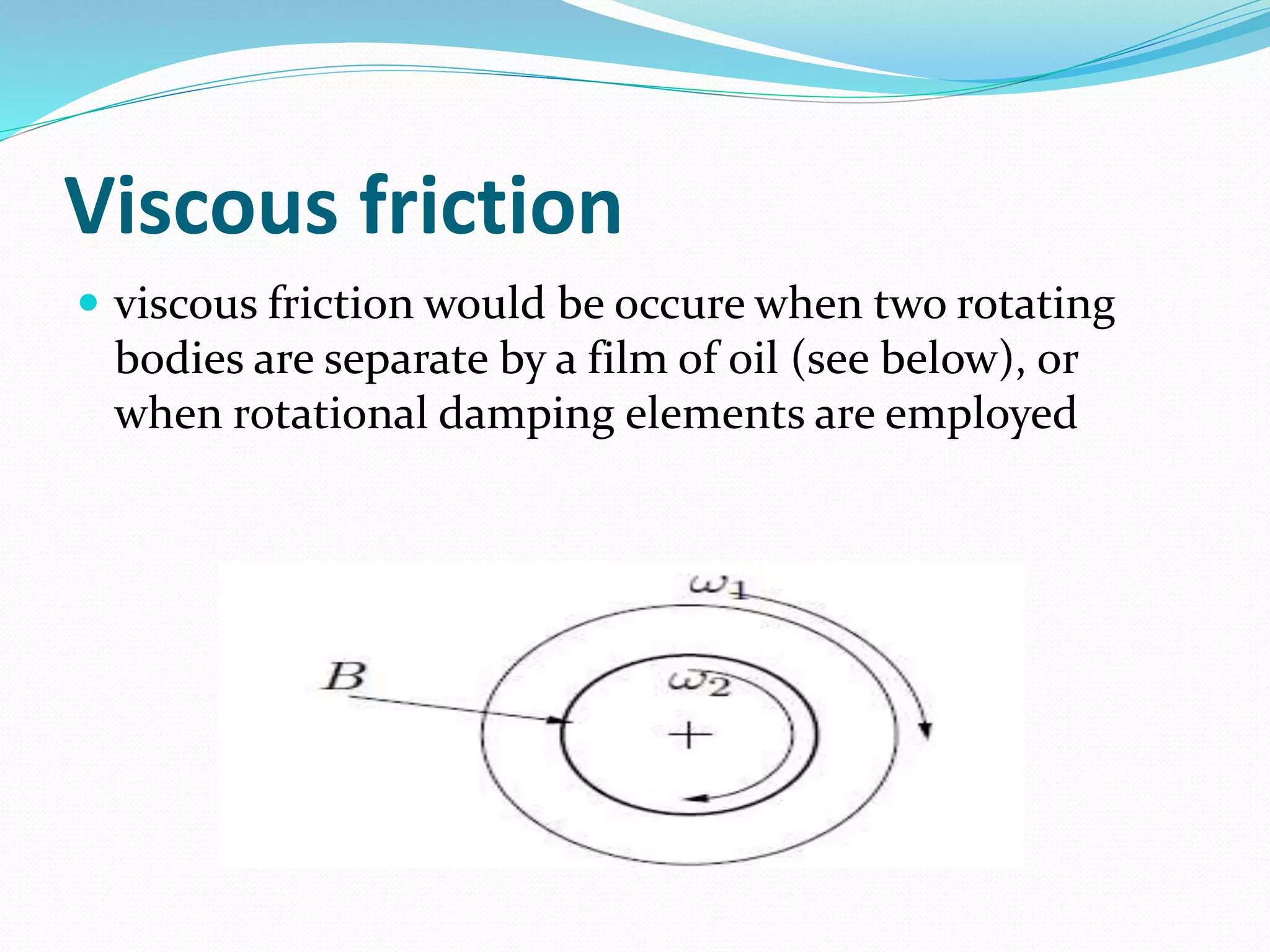
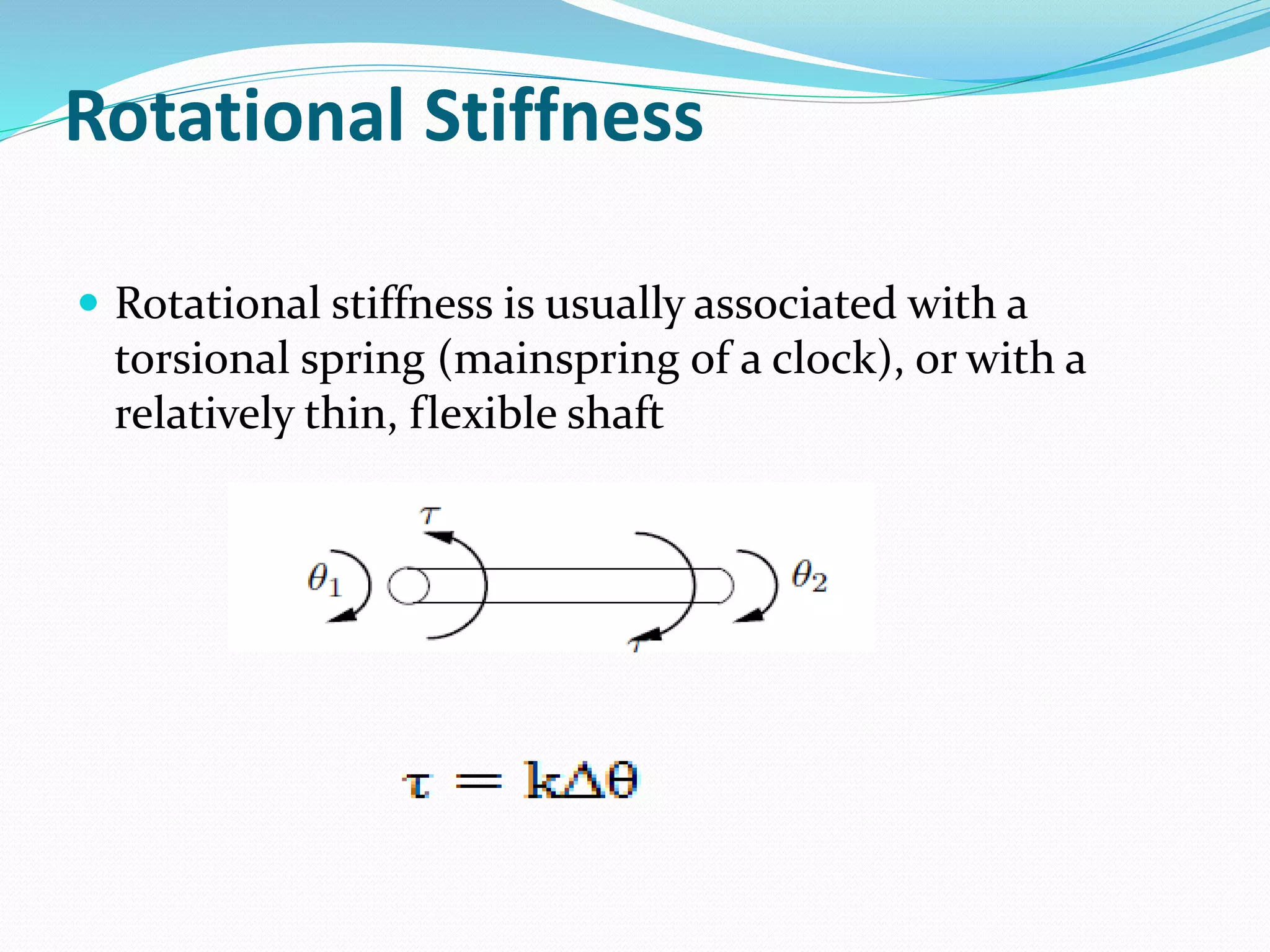
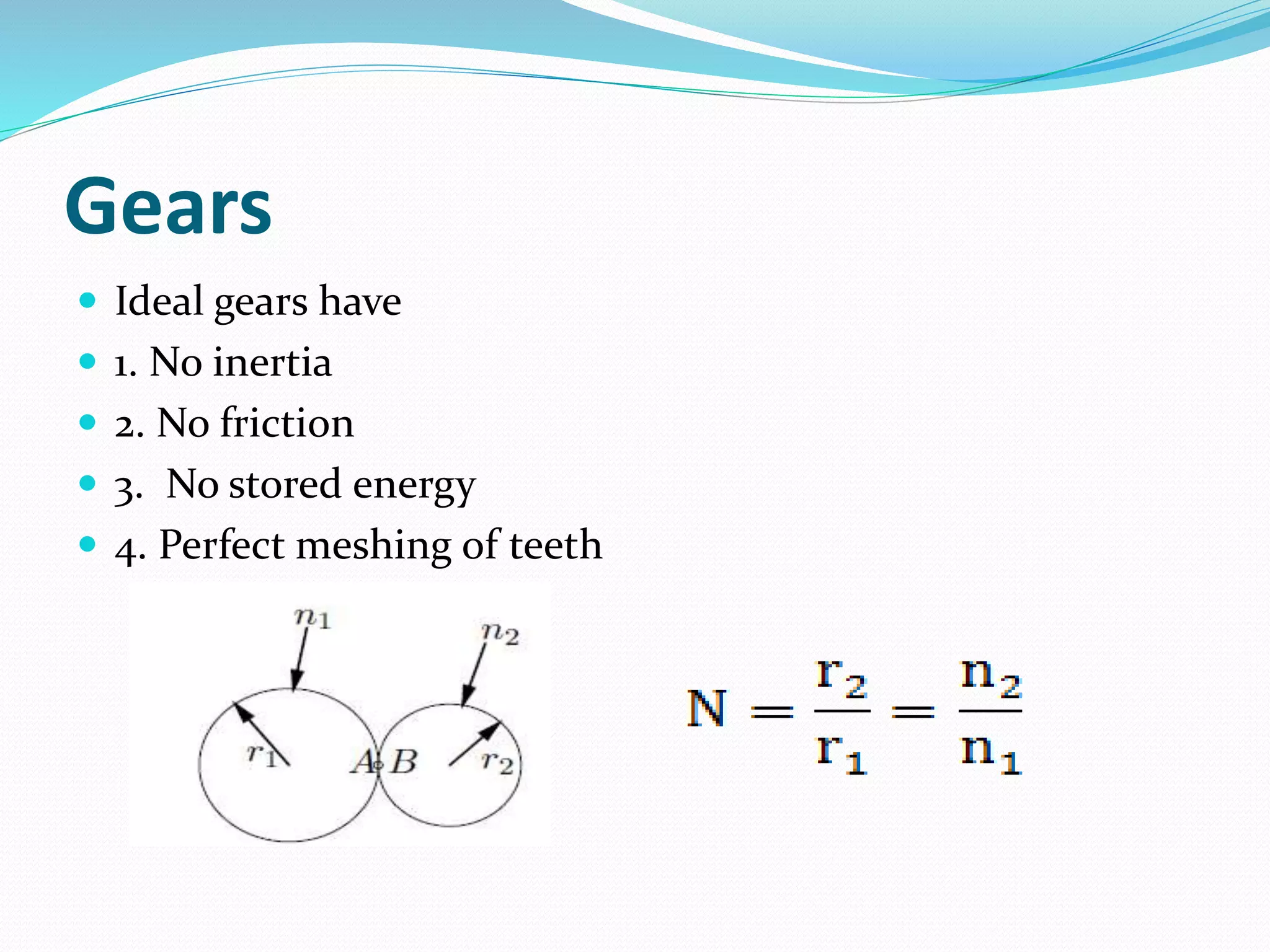
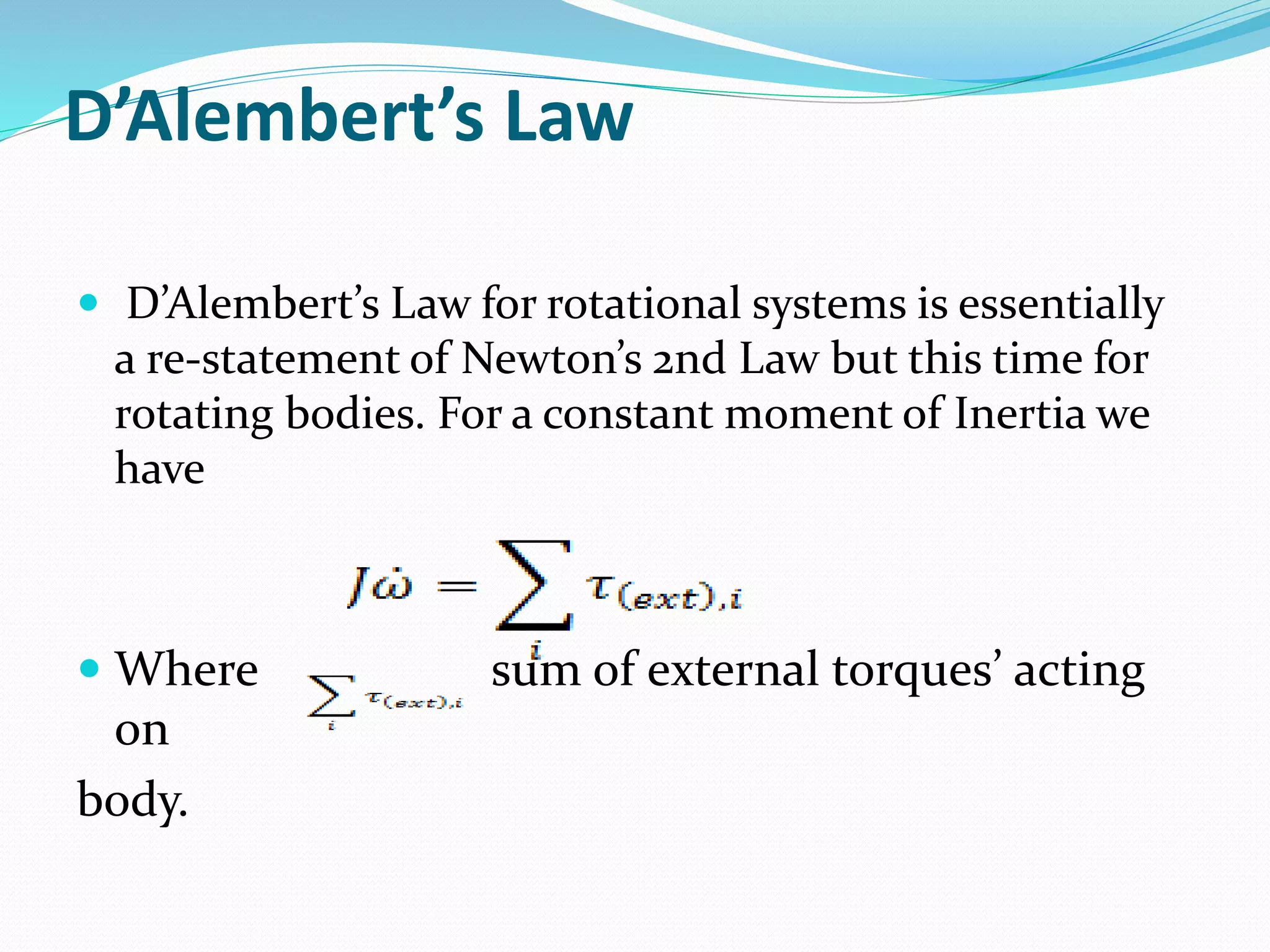
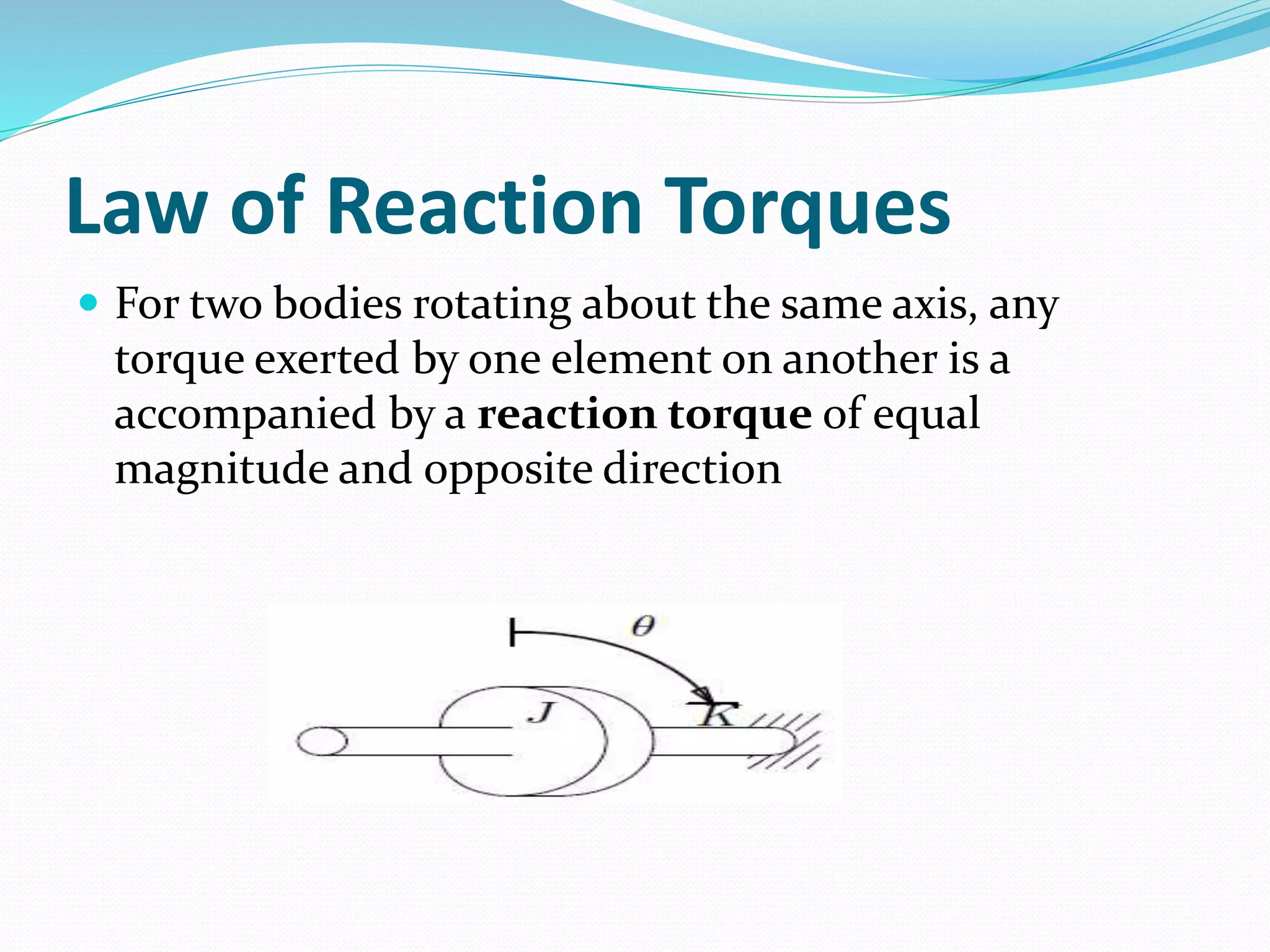
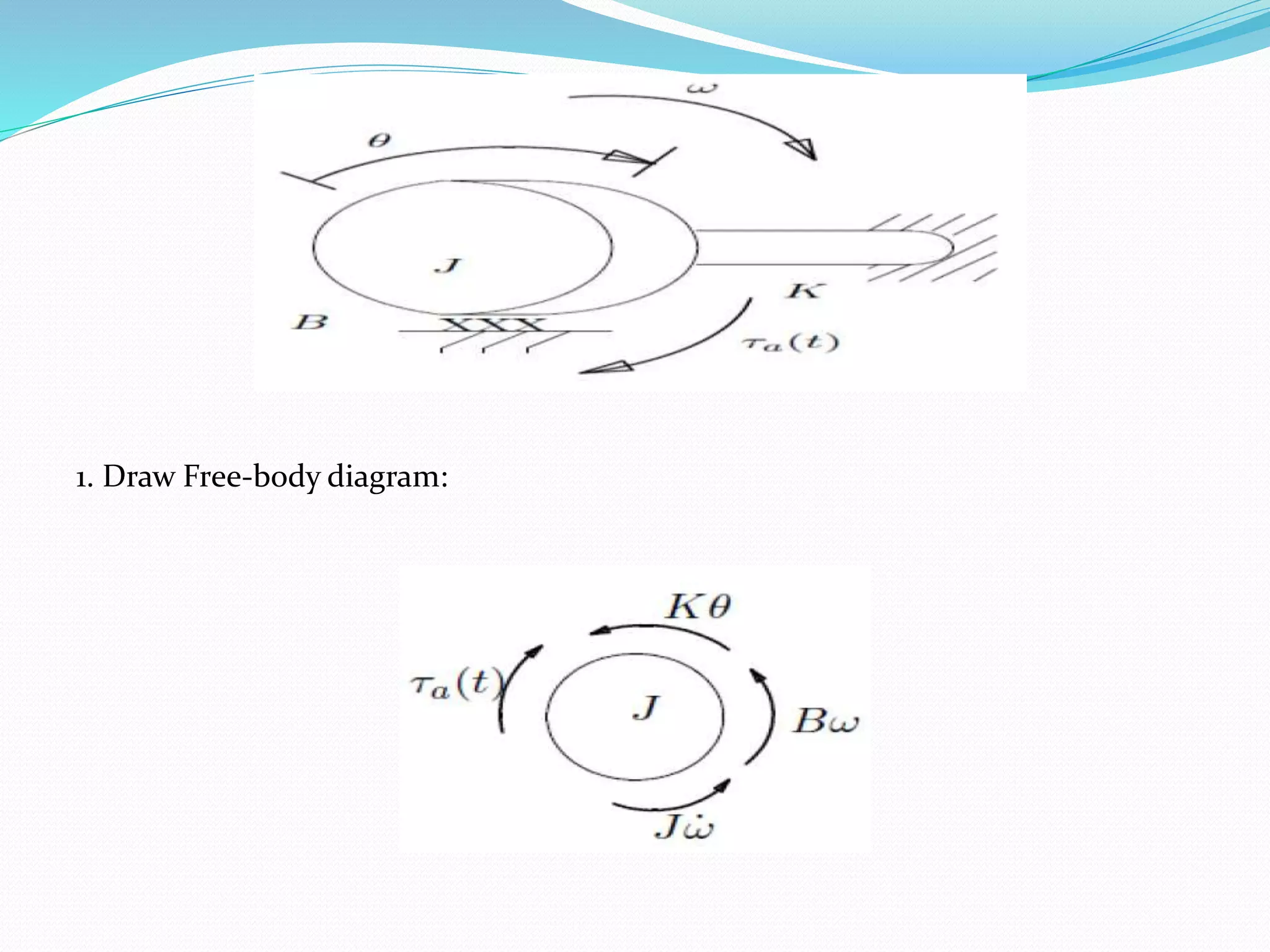
This document discusses translational and rotational mechanical systems. It begins by defining variables for translational systems like displacement, velocity, acceleration, force, work, and power. It then discusses element laws for translational systems including viscous friction and stiffness elements. The document also introduces rotational systems and defines variables like angular displacement, velocity, acceleration, and torque. It discusses element laws for rotational systems including moment of inertia, viscous friction, and rotational stiffness. Finally, it covers interconnection laws for both translational and rotational systems and provides an example of obtaining the system model for a rotational system.