Downloaded 250 times



![58 | P a g e
REFERENCES
1. Gonzalez, I., et al. Real-time altitude robust controller for a Quad-rotor aircraft using
Sliding mode control technique. in Unmanned Aircraft Systems (ICUAS), 2013
International Conference
on. 2013.
2. Jiang, J., et al. Control platform design and experiment of a Bi-copter. In Control
Conference(CCC), 2013 32nd Chinese. 2013.
3. Mitchell, G., The Raspberry Pi single-board computer will revolutionize computer
science teaching [For &Against]. Engineering & Technology, 2012. 7(3): p. 26-26.
4. Berezny, N., et al. Accessible aerial autonomy. in Technologies for Practical Robot
Applications(Tephra), 2012 IEEE International Conference on. 2012.
5. Sarik, J. and I. Kymissis. Lab kits using the Arduino prototyping platform.in Frontiers
in Education Conference (FIE), 2010 IEEE. 2010.
6. Reinhardt, K.C., et al. Solar-powered unmanned aerial vehicles. In Energy Conversion
Engineering Conference, 1996. IECEC 96., Proceedings of the 31st Intersociety. 1996.
7. Uragun, B. Energy Efficiency for Unmanned Aerial Vehicles. in Machine Learning
and
Applications and Workshops (ICMLA), 2011 10th International Conference on. 2011.
8. Uragun, B. Energy efficiency in Nano Aerial Vehicles. in Aerospace Conference, 2012
IEEE.
9. Buchmann, I., What The Best Battery? 2012.
10. Edwards, C., Not-so-humble raspberry pi gets big ideas. Engineering & Technology,
2013. 8(3):
11. Krajnik, T., et al. A simple visual navigation system for an UAV.in Systems, Signals
and Devices(SSD), 2012 9th International Multi-Conference on. 2012.
12. Leishman, R., et al. Relative navigation and control of a hexacopter. In Robotics and
Automation(ICRA), 2012 IEEE International Conference on. 2012.
13. Guowei, C., et al., Modeling and Control of the Yaw Channel of a UAV Helicopter.
Industrial Electronics, IEEE Transactions on, 2008. 55(9): p. 3426-3434.](https://image.slidesharecdn.com/majorprojectreportb-150516141623-lva1-app6891/75/bi-copter-Major-project-report-ER-Abhishek-upadhyay-b-tech-ECE-58-2048.jpg)

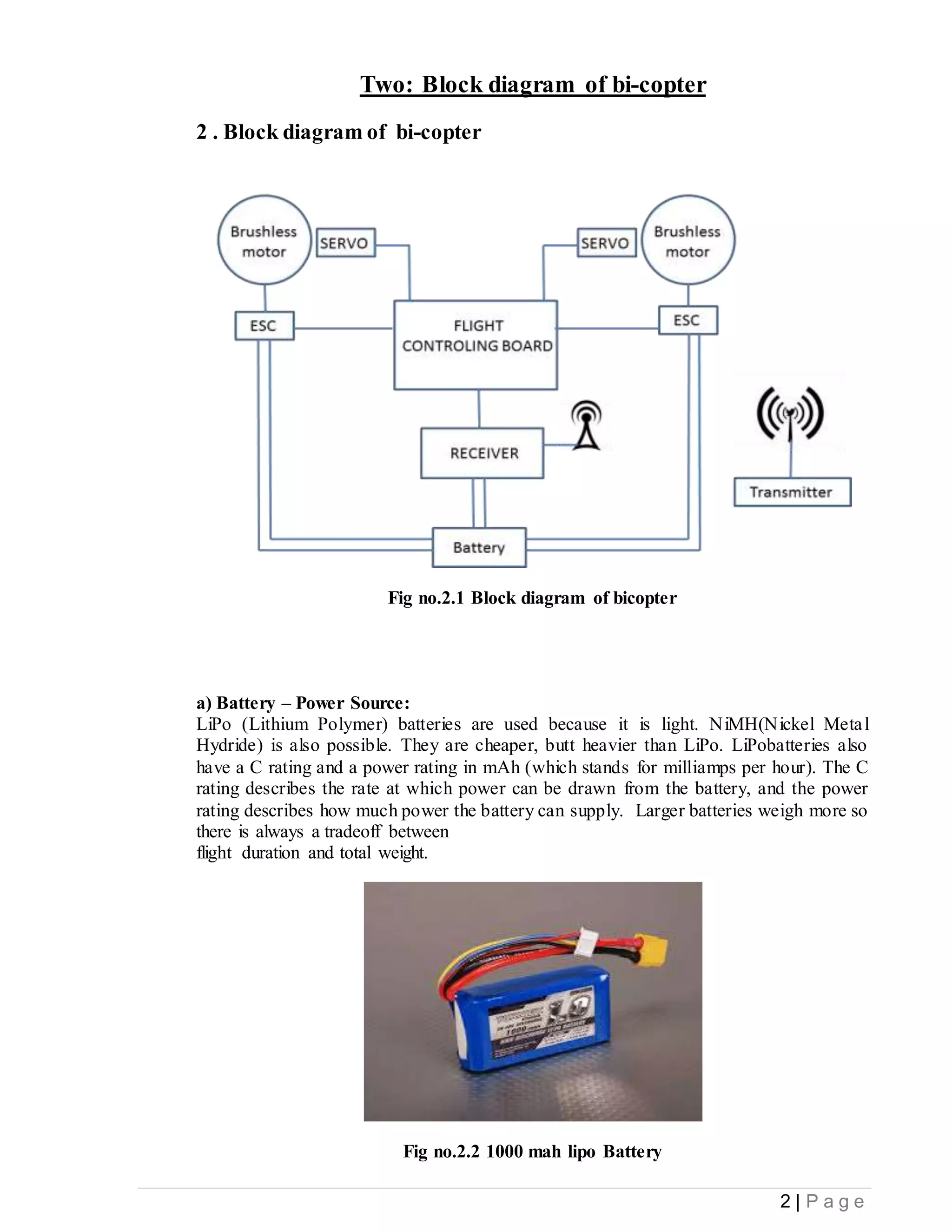
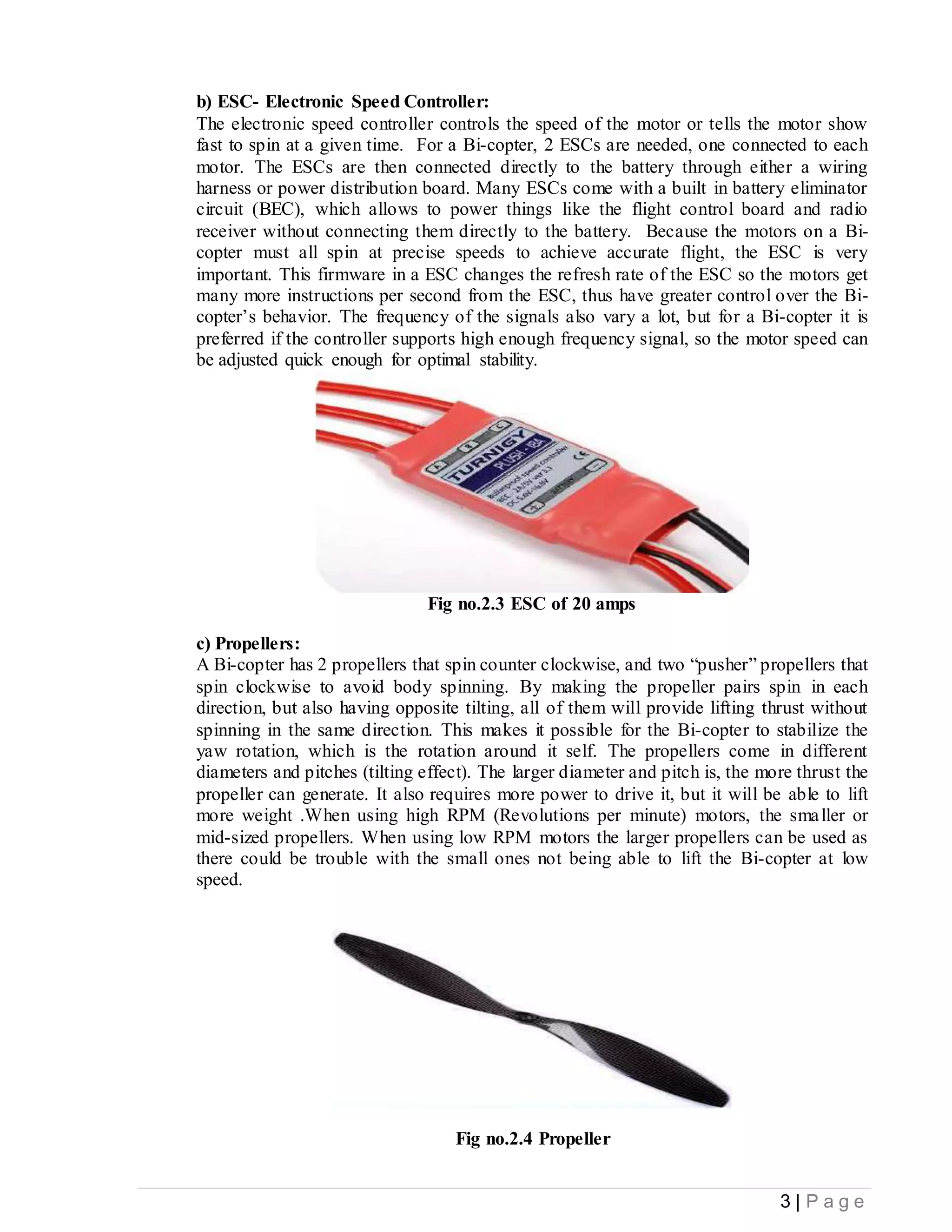
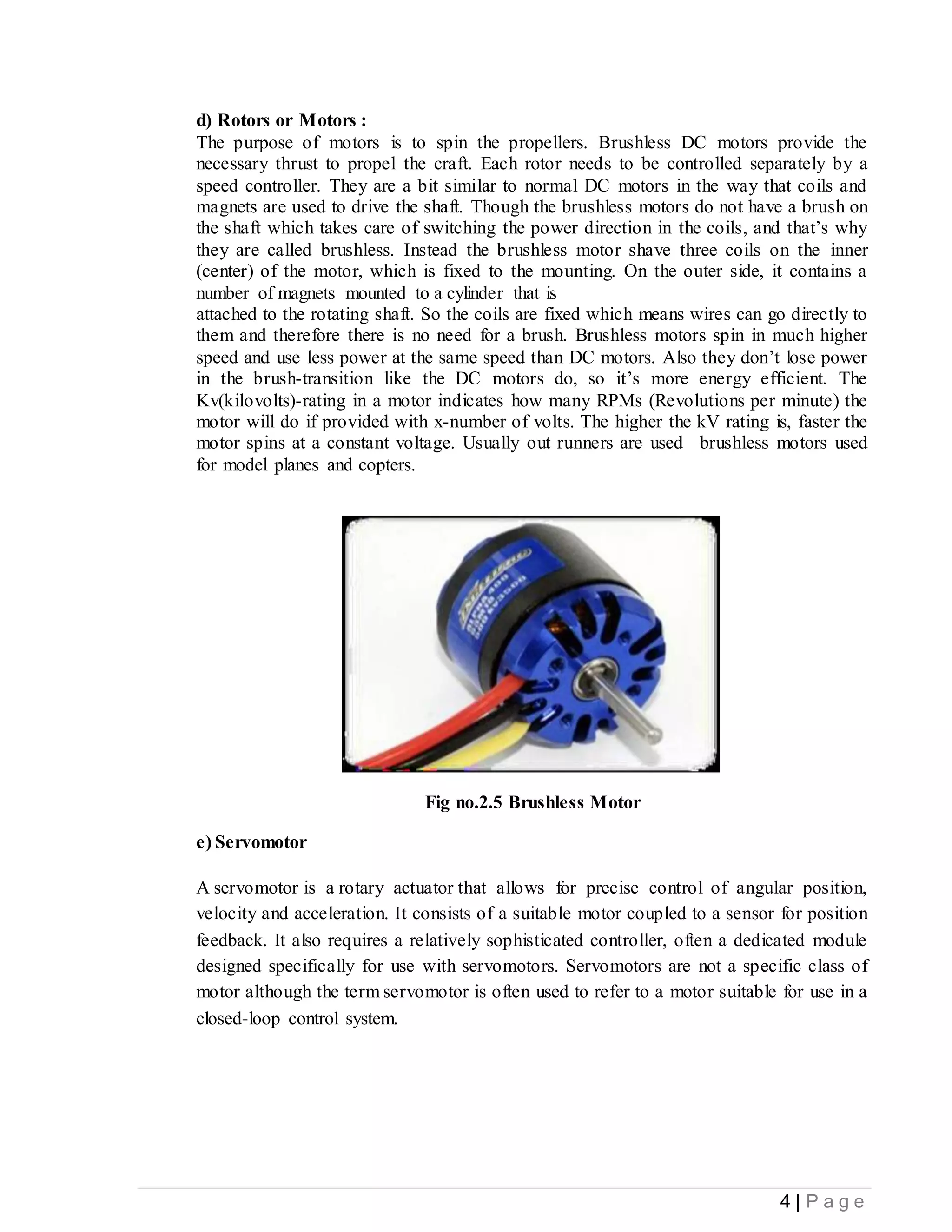
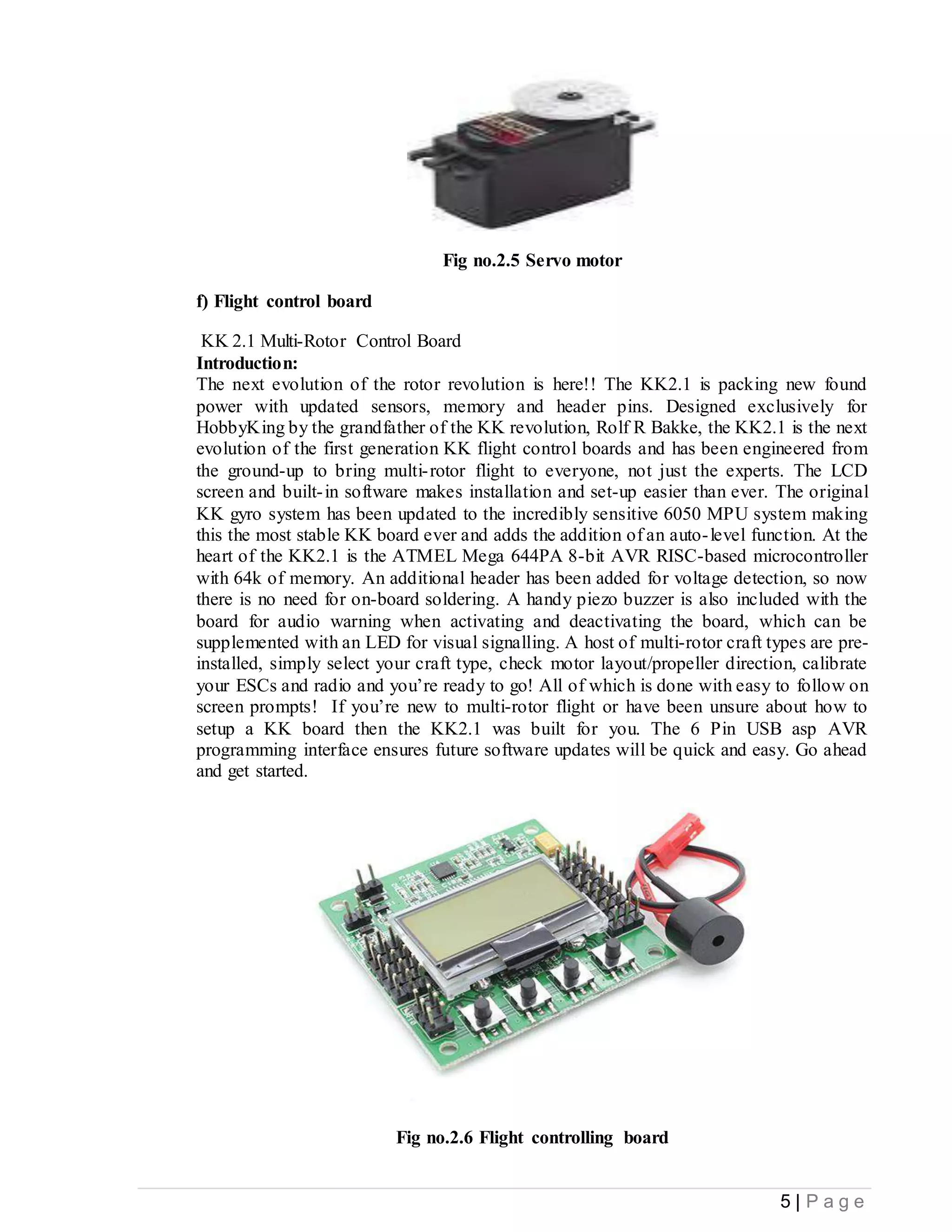
This document provides an overview of the components and control system of a bi-copter aircraft. It describes the key components including the battery, electronic speed controllers, propellers, brushless motors, servomotors, and flight control board. It explains how each component functions and interacts with the other components to enable the bi-copter to take off vertically, hover, and fly horizontally. The flight control board uses sensors and a microcontroller to process signals from the gyroscopes and radio receiver to stabilize the aircraft and control the rotational speed of each motor during flight.

























































































