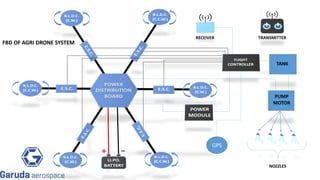
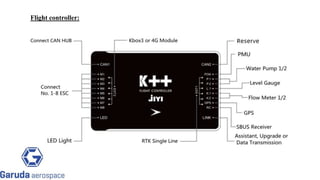
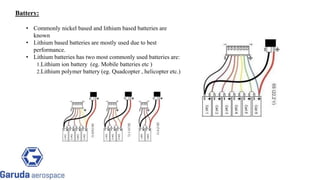
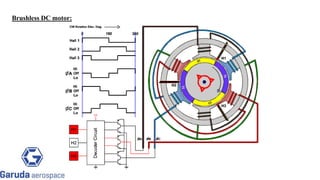
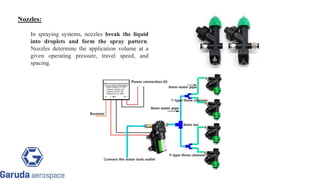
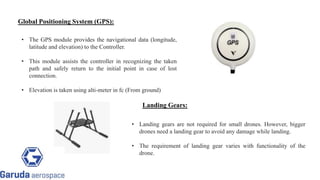
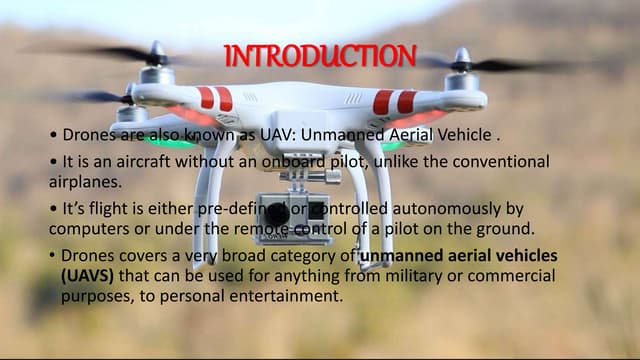
The document describes the key components of a multi-copter drone. It lists components such as the flight controller, battery, brushless DC motor, electronic speed controller, power module, propellers, power distribution board, GPS, landing gear, transmitter and receiver, telemetry, pump motor, nozzles, tank, and provides a block diagram. It then provides more details on selected components, describing their purpose and characteristics.