Downloaded 122 times

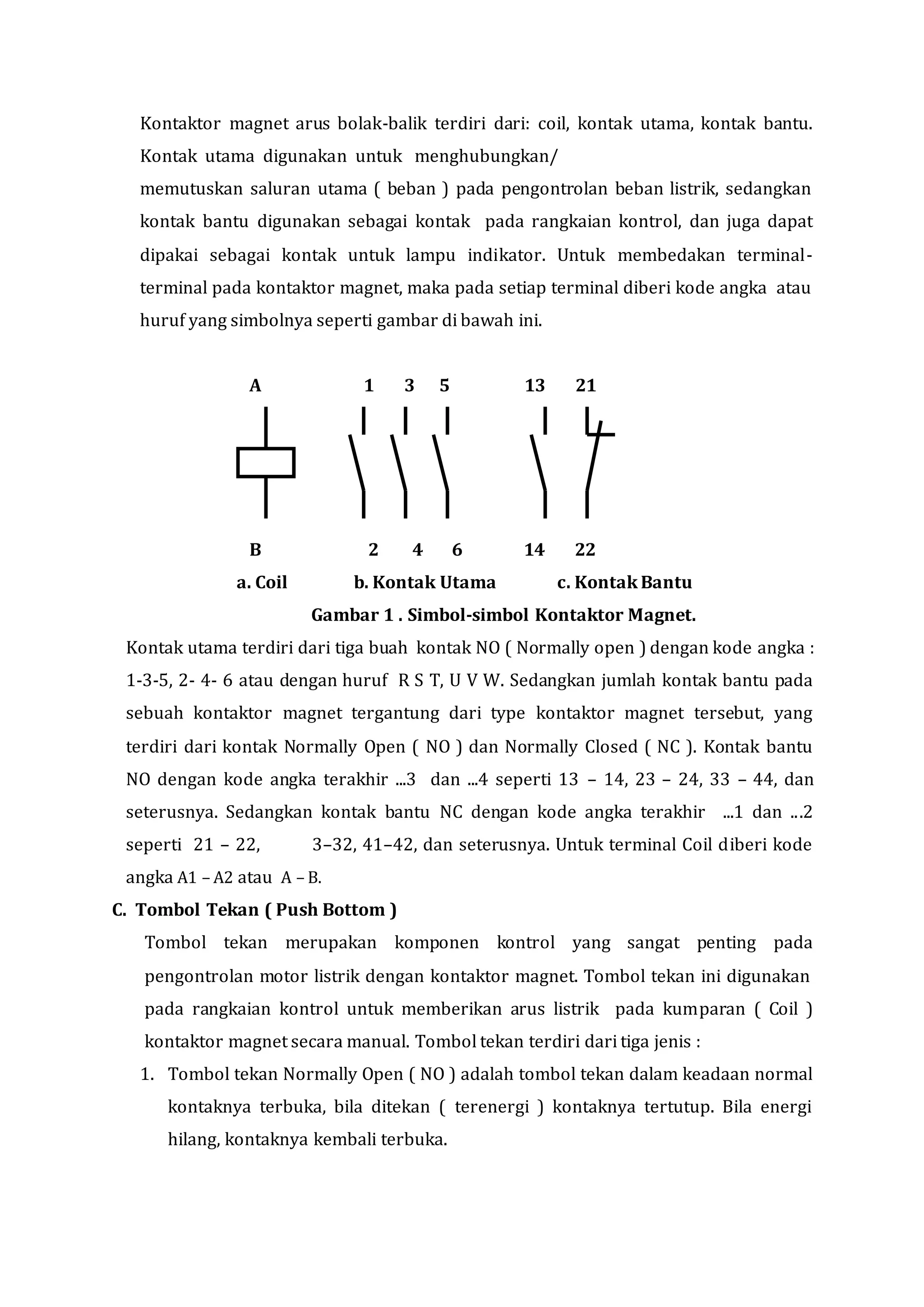


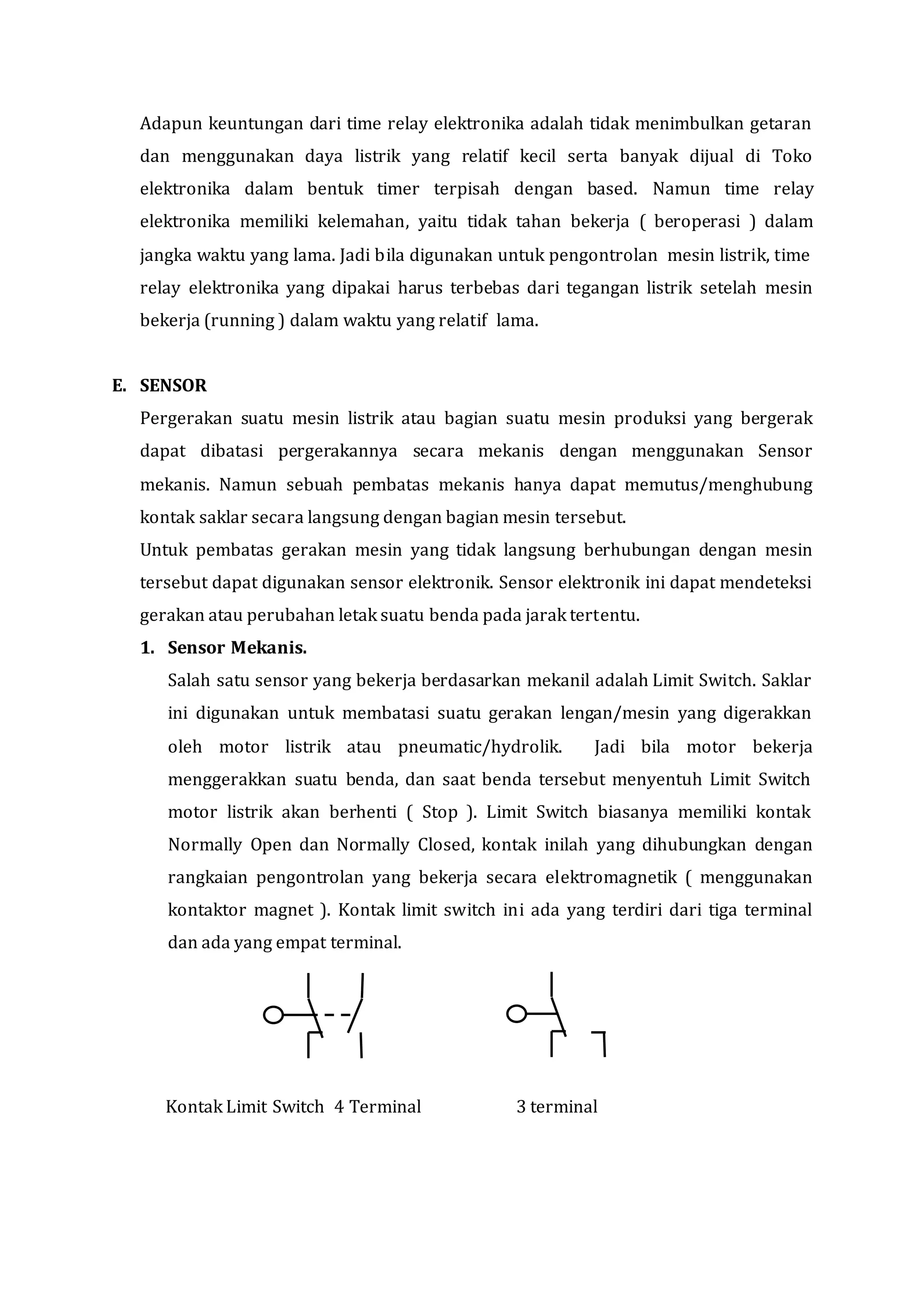
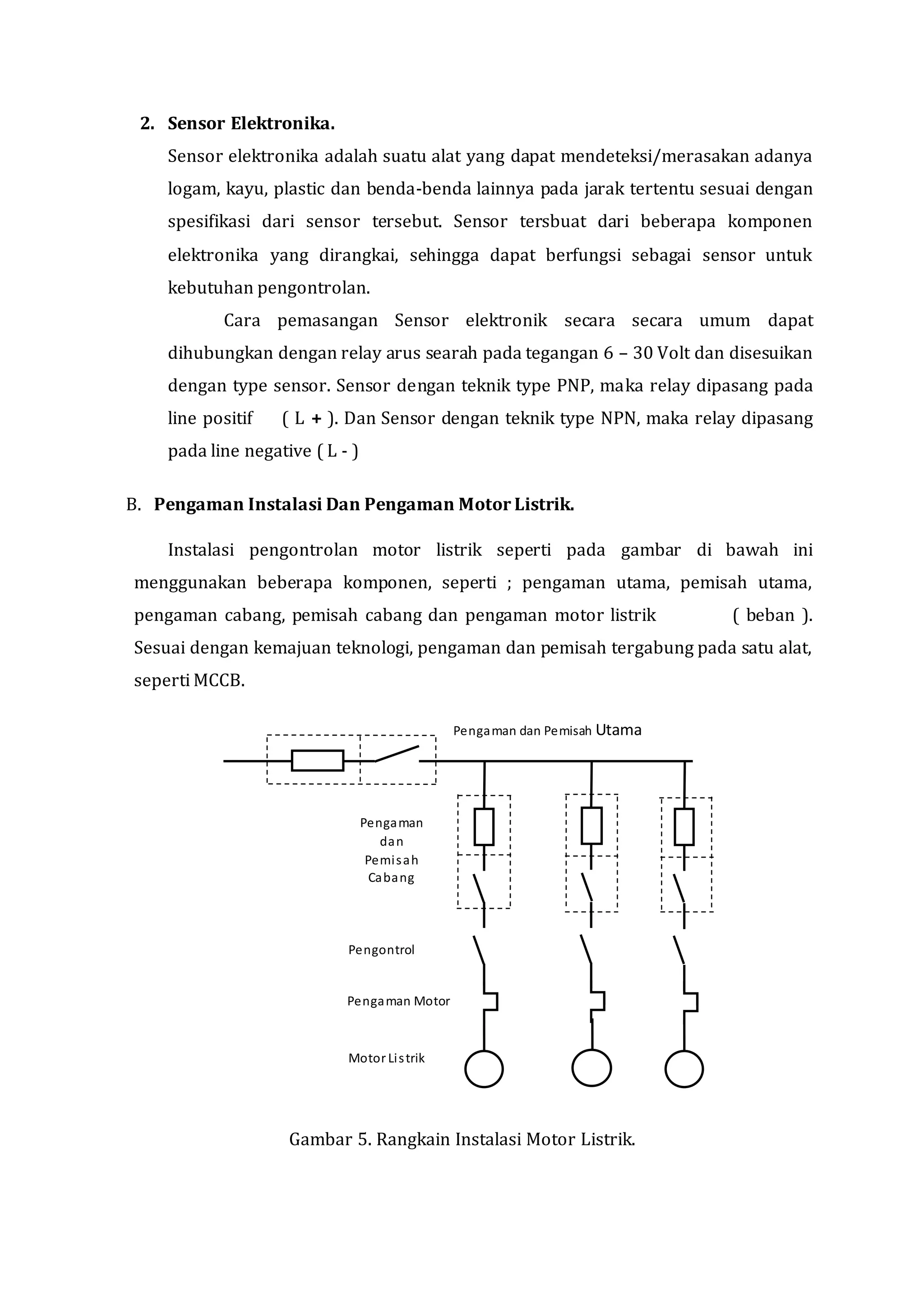




Teks tersebut membahas berbagai komponen dan alat kontrol yang digunakan pada pengontrolan motor listrik, seperti kontaktor magnet, tombol tekan, time relay, sensor, dan plat nama motor listrik. Komponen-komponen tersebut digunakan untuk mengontrol, mengamankan, dan membatasi operasi motor secara manual atau otomatis.























































































