Downloaded 280 times
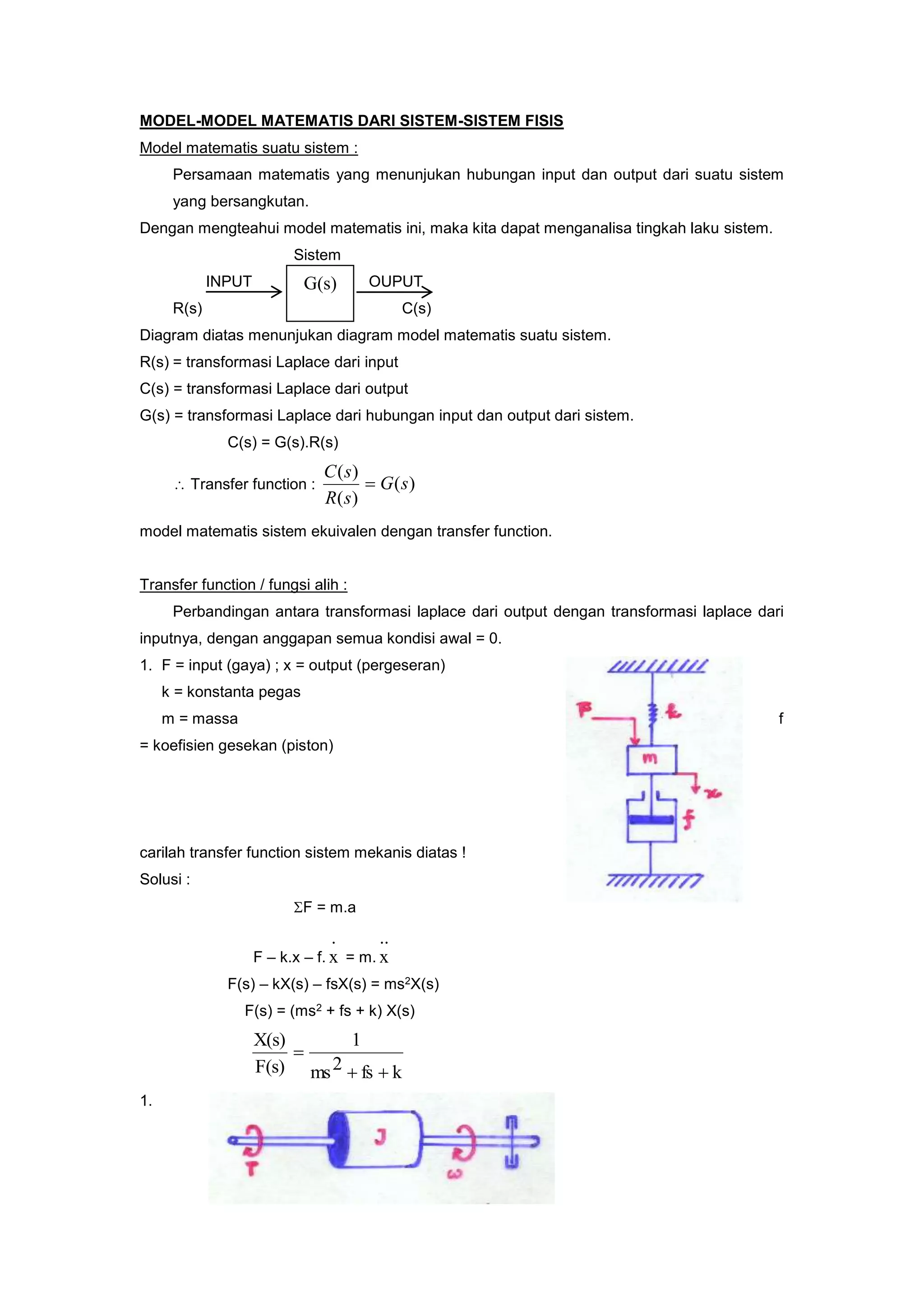

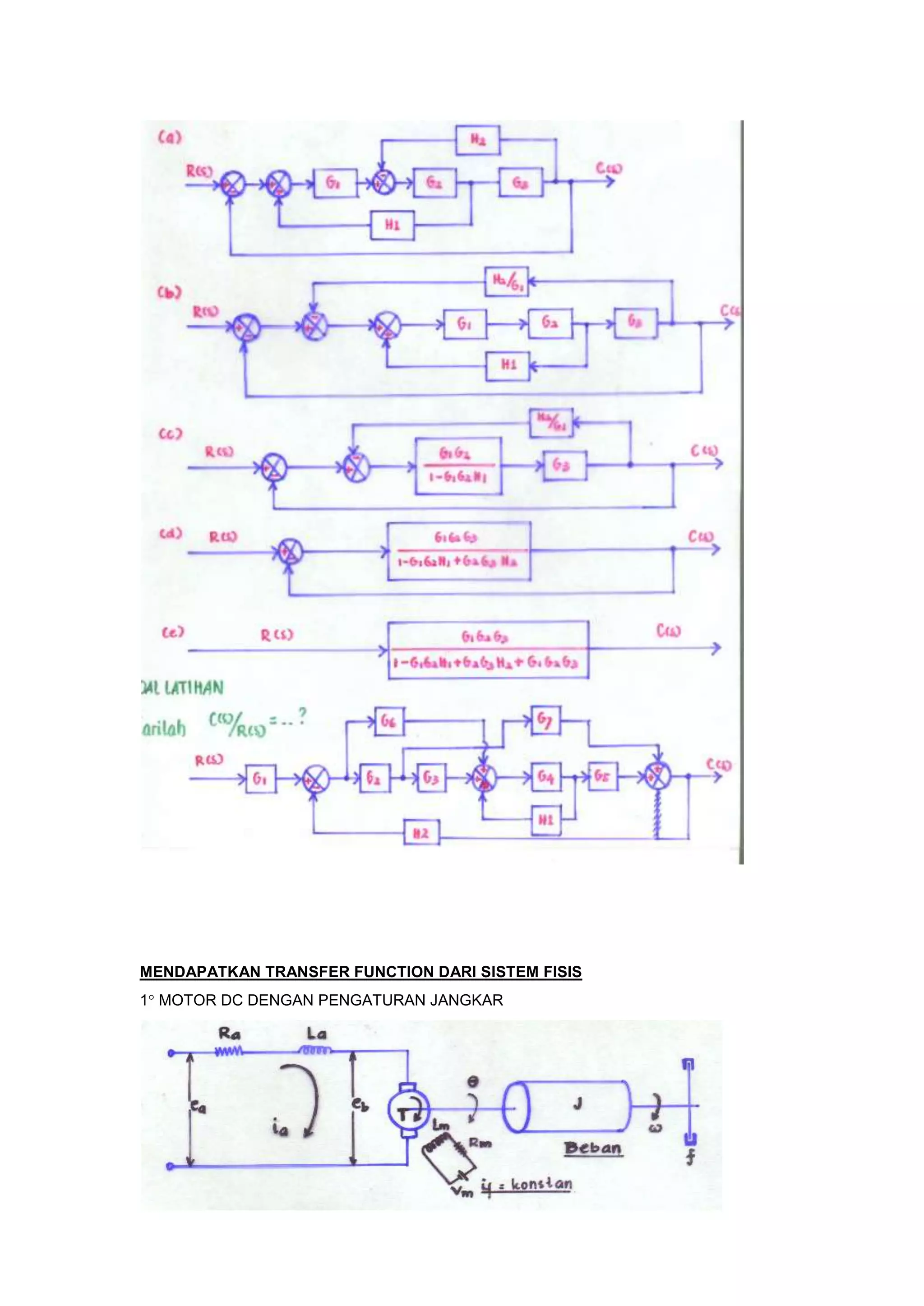
![Ra = tahanan jangkar
La = induktansi jangkar
ia = arus jangkar
if = arus medan
ea = tegangan jangkar
eb = emf terinduksi
= perpindahan sudut dari poros / batang meter
T = torsi
J = momen inersia total
f = koefisien geseran total
Persamaan Sistem :
(1) ea = Ra.ia + La.
b
e
dt
a
di
(2) eb = K . n . = c . n = c .
(3) T = KI . . Ia = cI . ia
(4) J.
.
ω + f . = T
......?
(s)
a
E
Ω(s)
Transformasi Laplace :
(1) Ea(s) = Ia(s) [Ra + La . s] + Eb(s)
(2) Eb(s) = c . (s)
(3) T(s) = CI.Ia(s)
(4) T(s) = (s) [Js +f]
(1) Ia(s) [Ra + Las] = Ea(s) – Eb(s)
(2) Eb(s) = c . (s)
(s) Eb(s)
(3) T(s) = cI . Ia(s)
C](https://image.slidesharecdn.com/bab2sistemkontrol-140331020223-phpapp01/75/Bab-2-sistem-kontrol-11-2048.jpg)
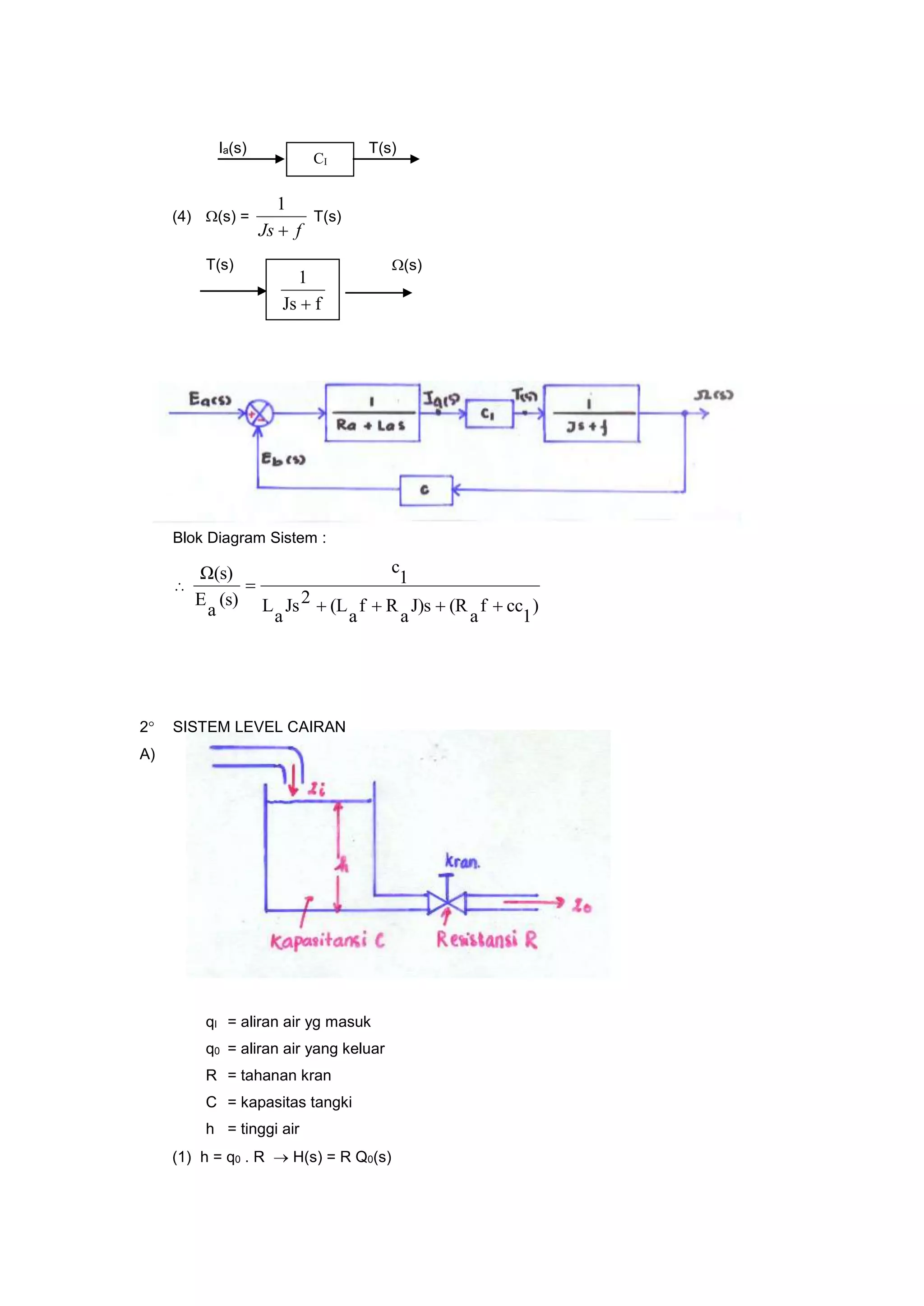
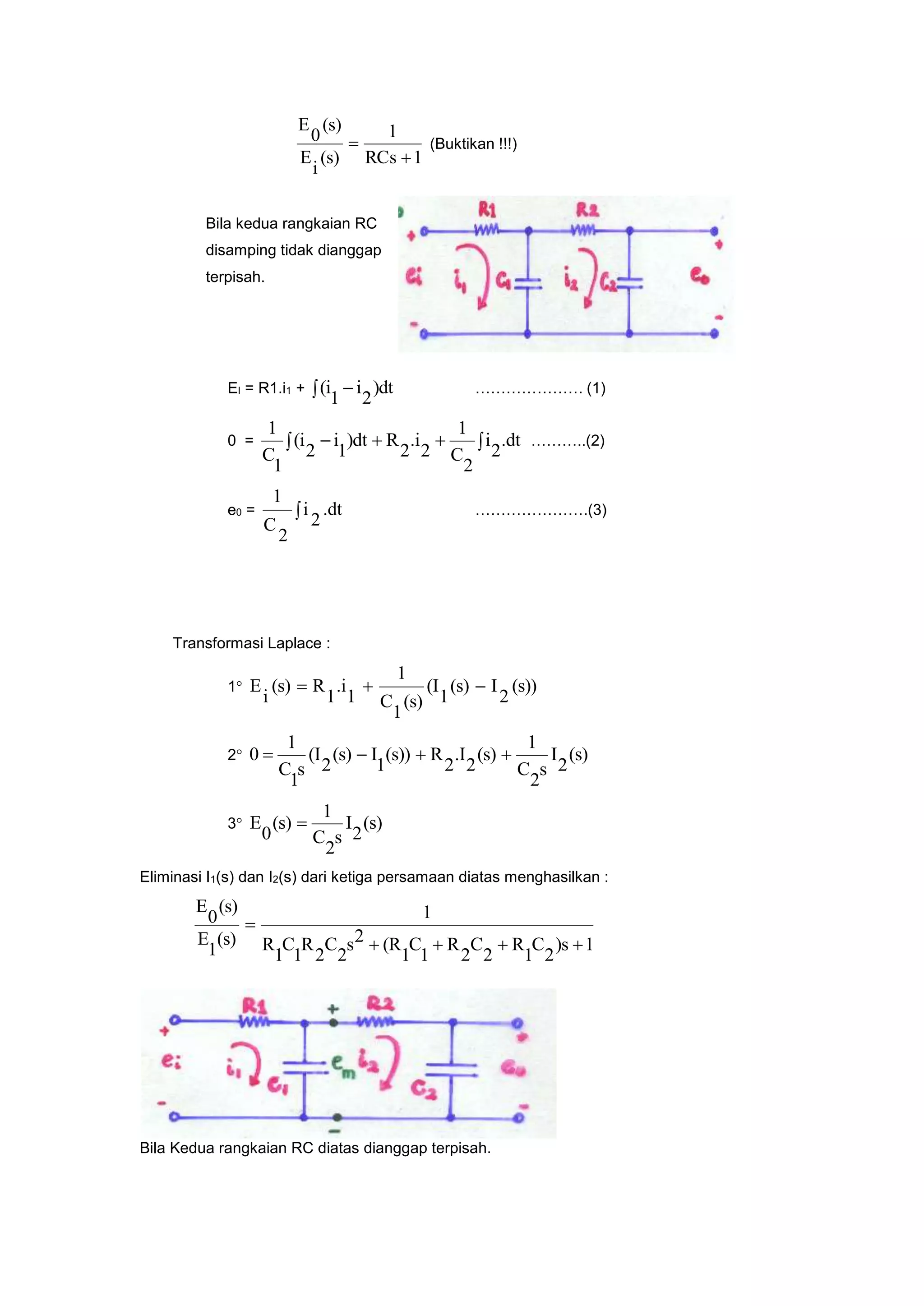
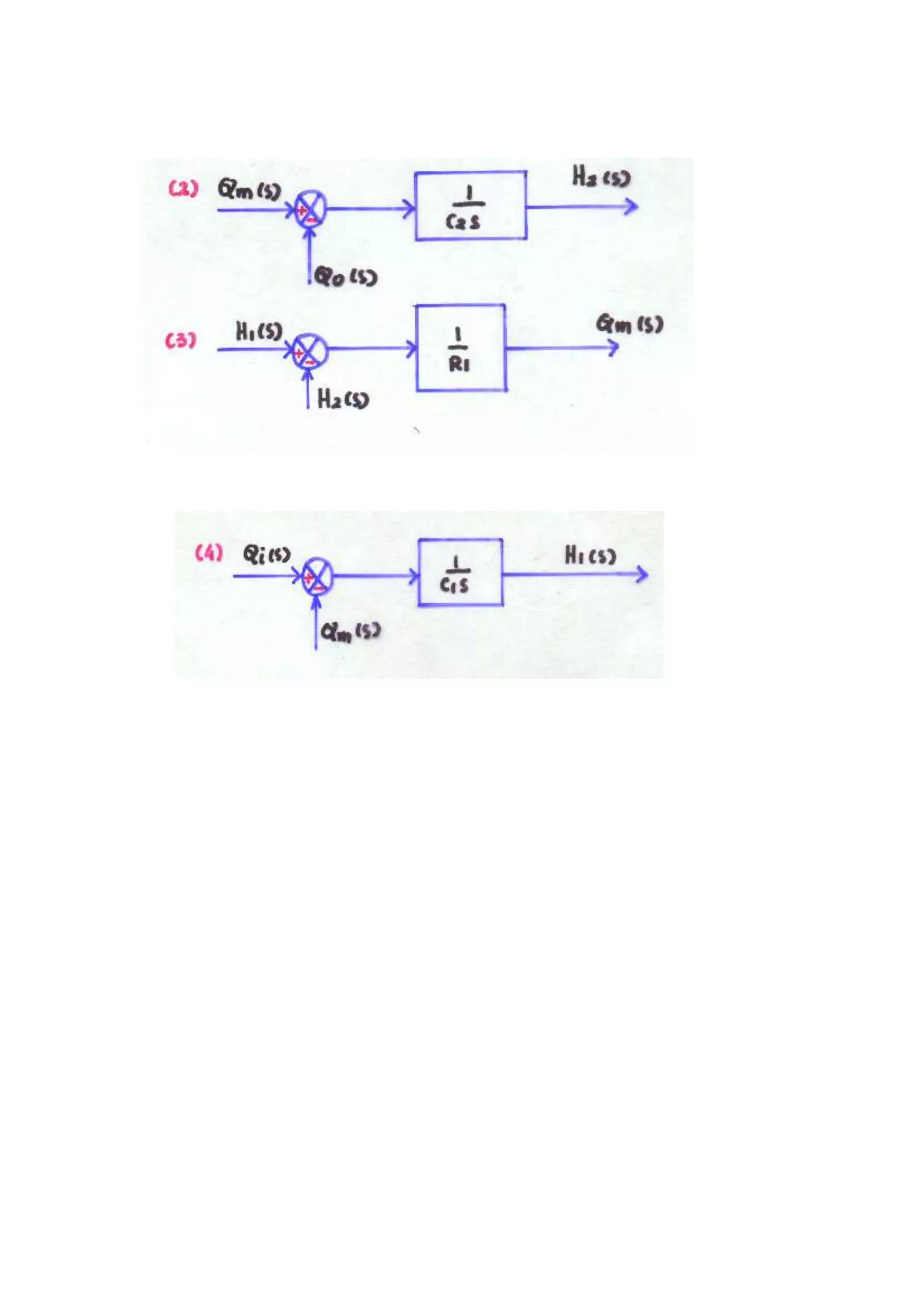
![(2)
0
q
i
q
dt
dh
C C.sH(s) = QI(s) – Q0(s)
.....?
(s)
i
Q
H(s)
H(s) = R [QI(s) – CsH(s)]
[RC.s + 1] H(s) = RQi(s)]
1)R(s
R
(s)
i
Q
H(s)
B)
......?
(s)
i
Q
(s)
0
Q
Tangki 2 :
q0 =
2
R
2
h
Q0(s) =
2
R
(s)
2
H
…. (1)
C2
dt
2
dh
= qm – q0 C2sH2(s) = Qm(s) – Q0(s) ….(2)
Tangki 1 :
(s)....(4)
m
Q(s)
i
Q(s)
1
sH
1
C
m
q
1
q
dt
1
dh
1
C
.....(3)
1
R
(s)
2
H(s)
1
H
(s)
m
Q
1
R
2
h
1
h
m
q
(1) H2(s) Q0(s)
2
R
1](https://image.slidesharecdn.com/bab2sistemkontrol-140331020223-phpapp01/75/Bab-2-sistem-kontrol-13-2048.jpg)
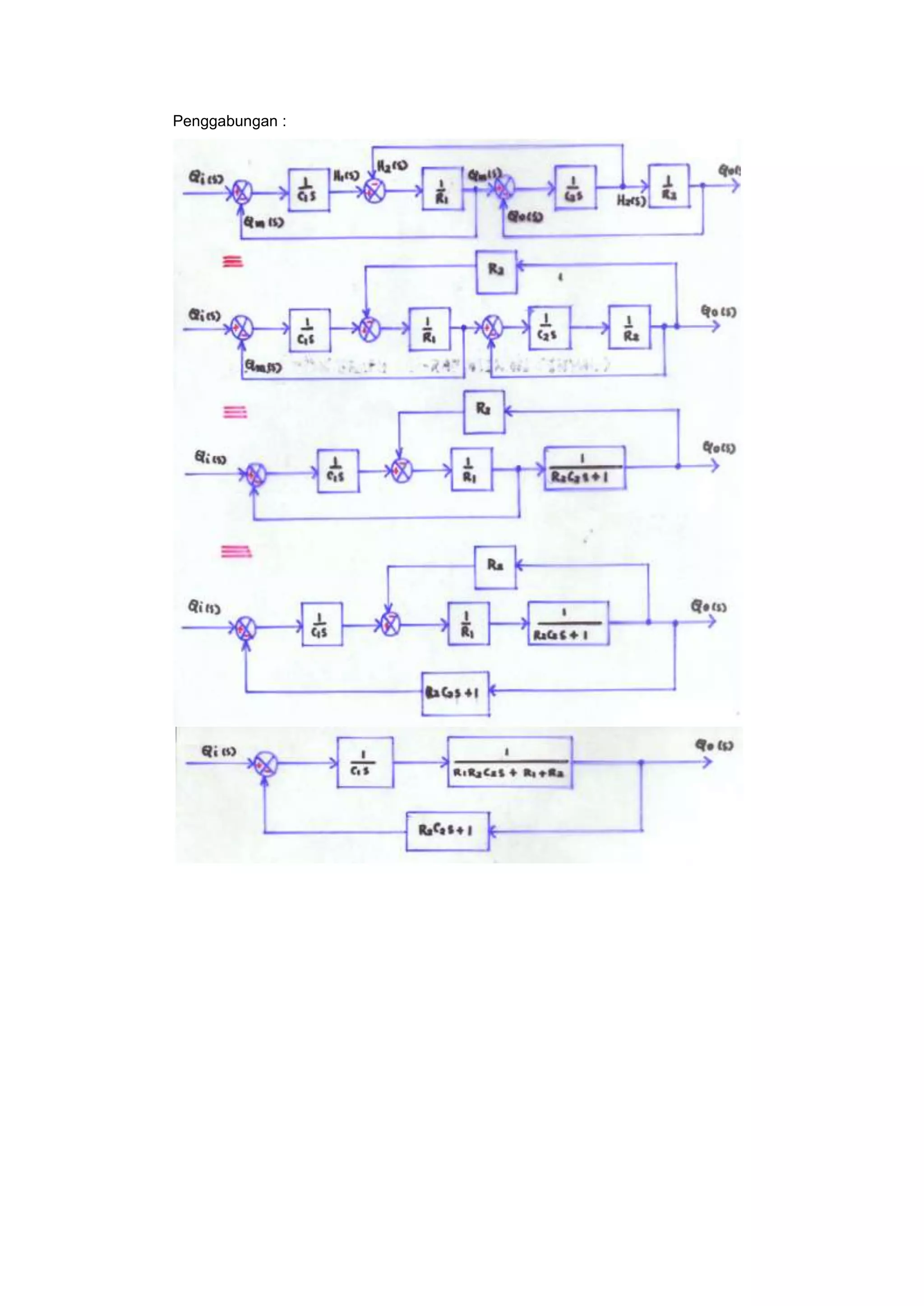
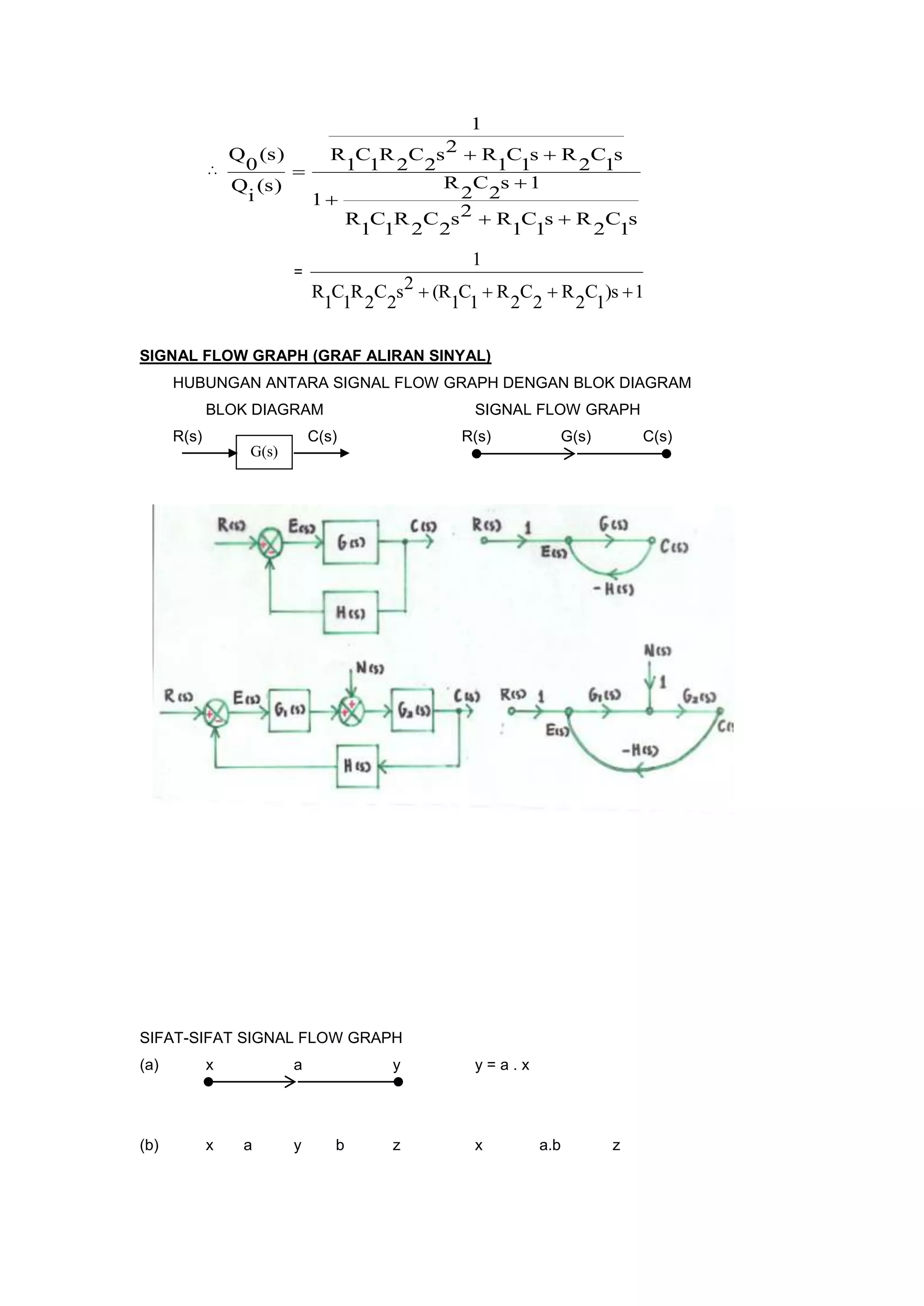

1. Model matematis sistem mewakili hubungan input dan output sistem melalui persamaan matematis. 2. Transfer function menjelaskan hubungan antara transformasi Laplace dari input dan output sistem. 3. Blok diagram dan signal flow graph digunakan untuk merepresentasikan model matematis sistem secara visual.







































