Downloaded 11 times




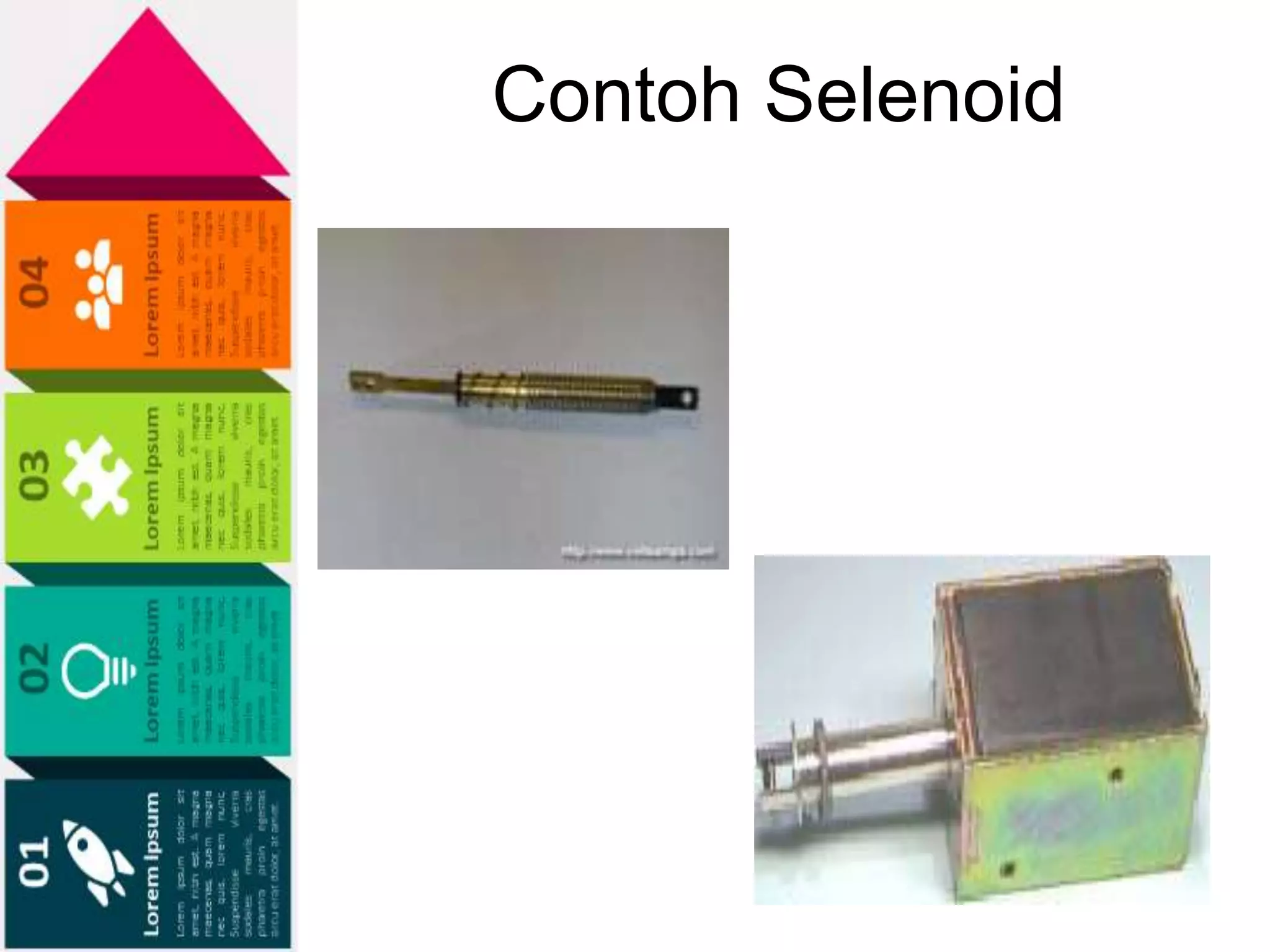


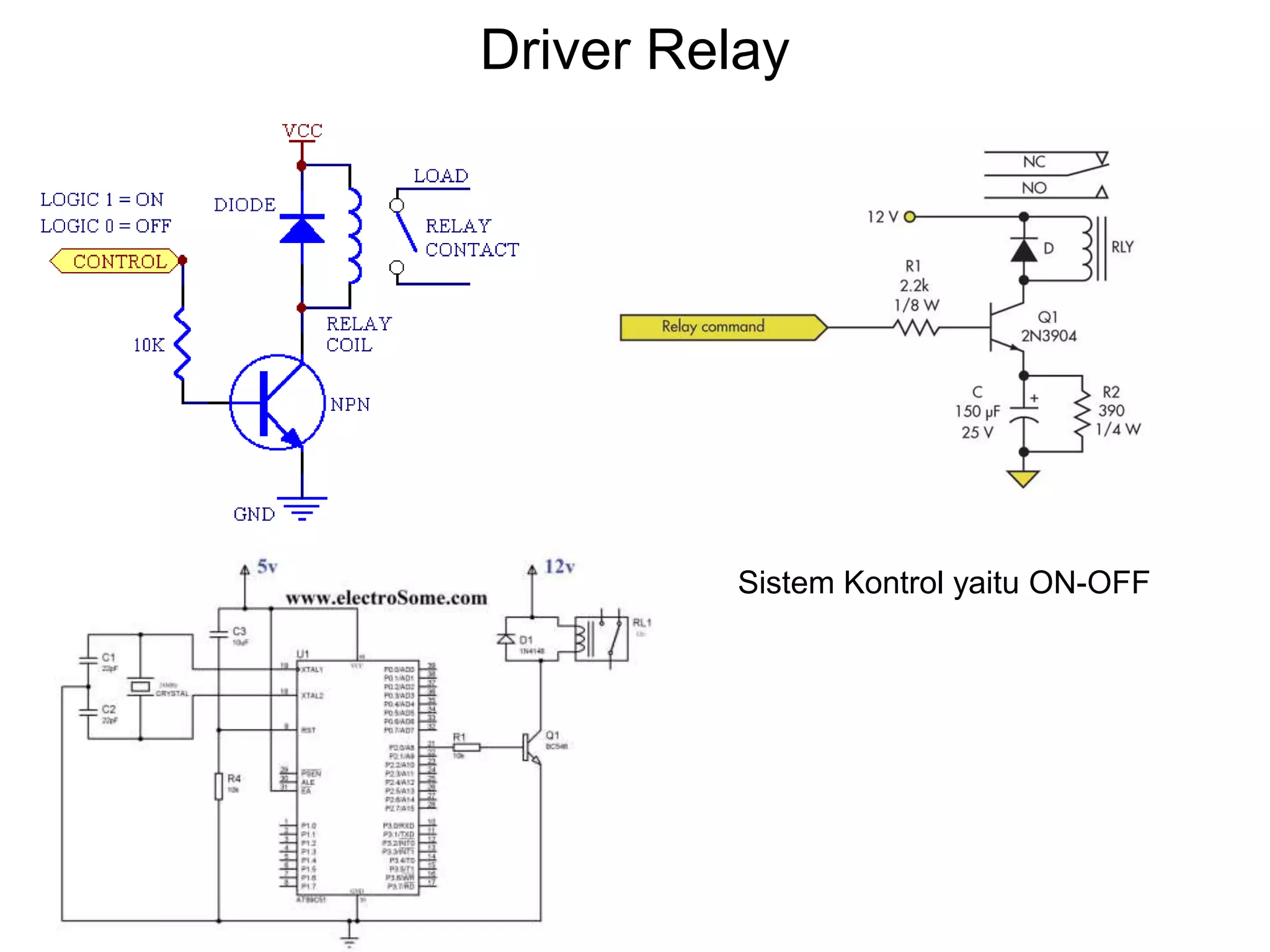
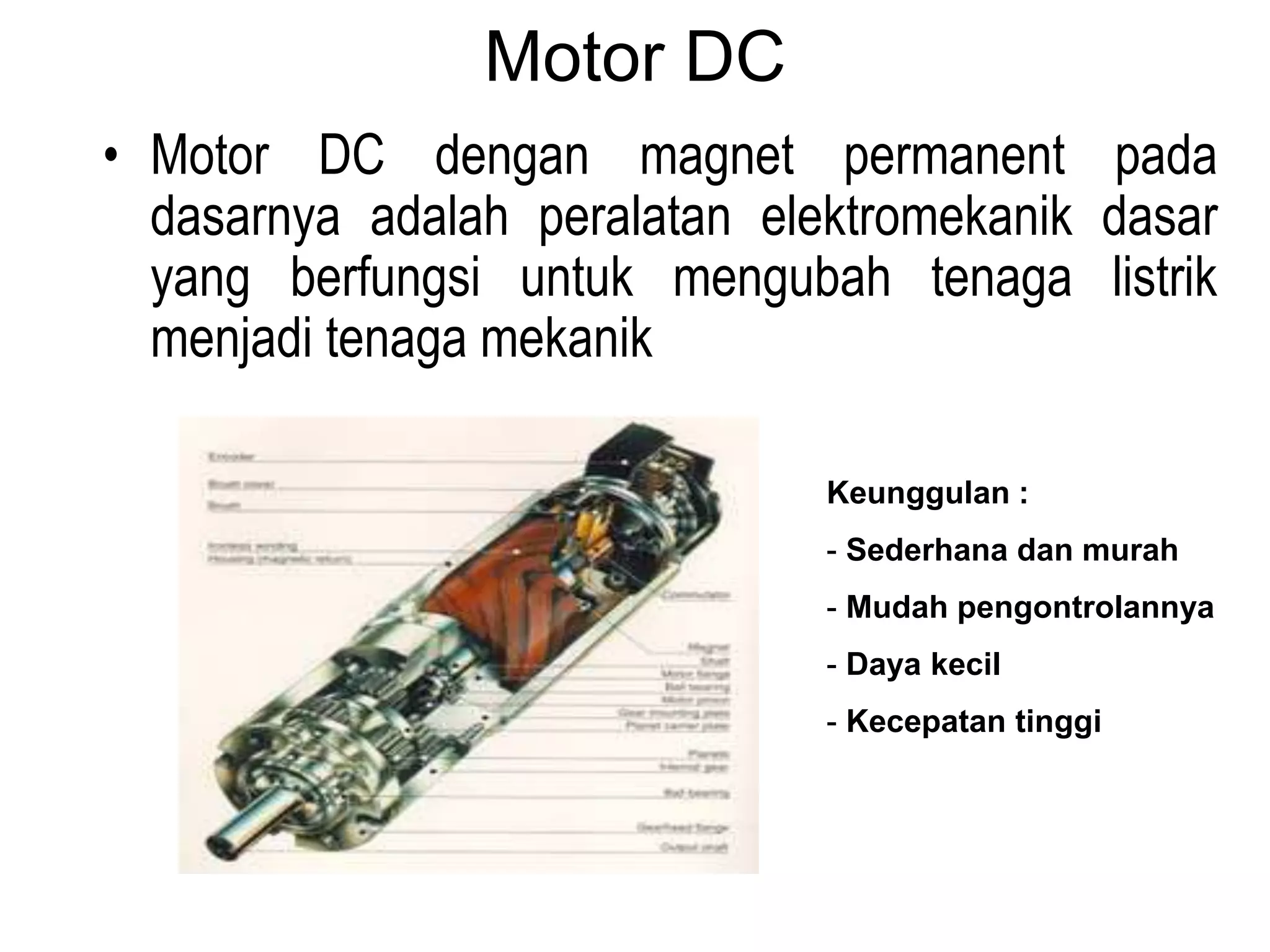

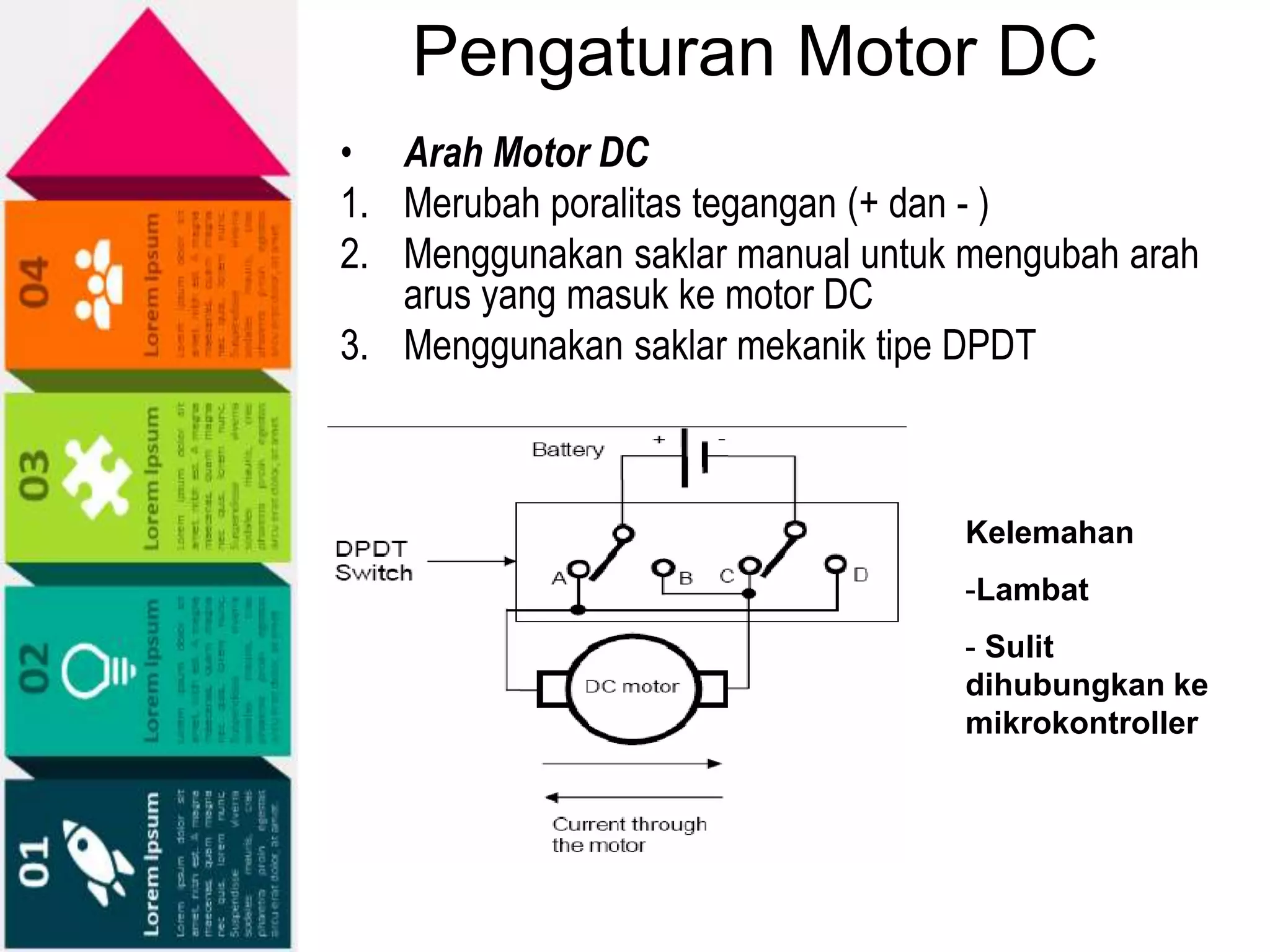
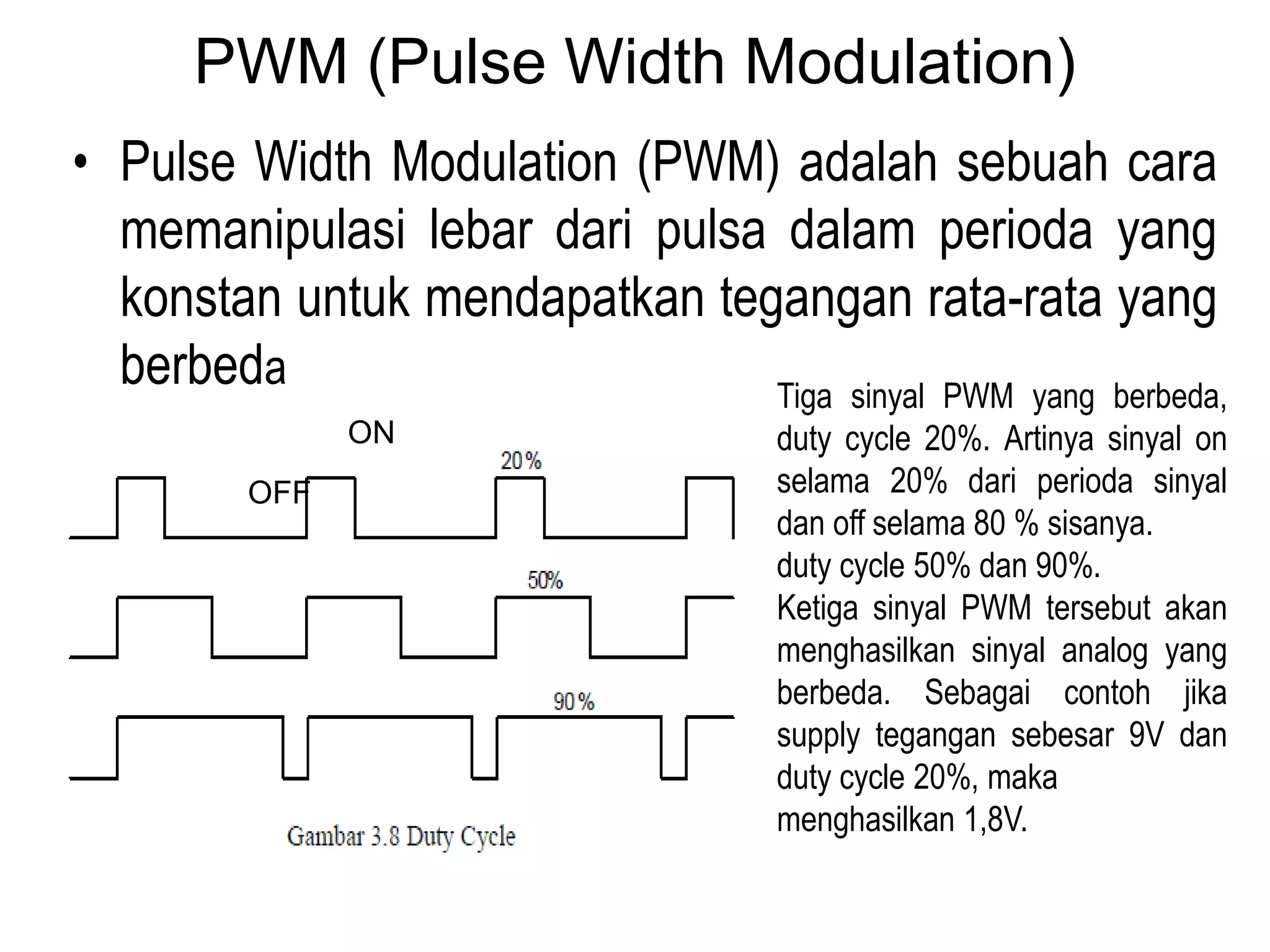


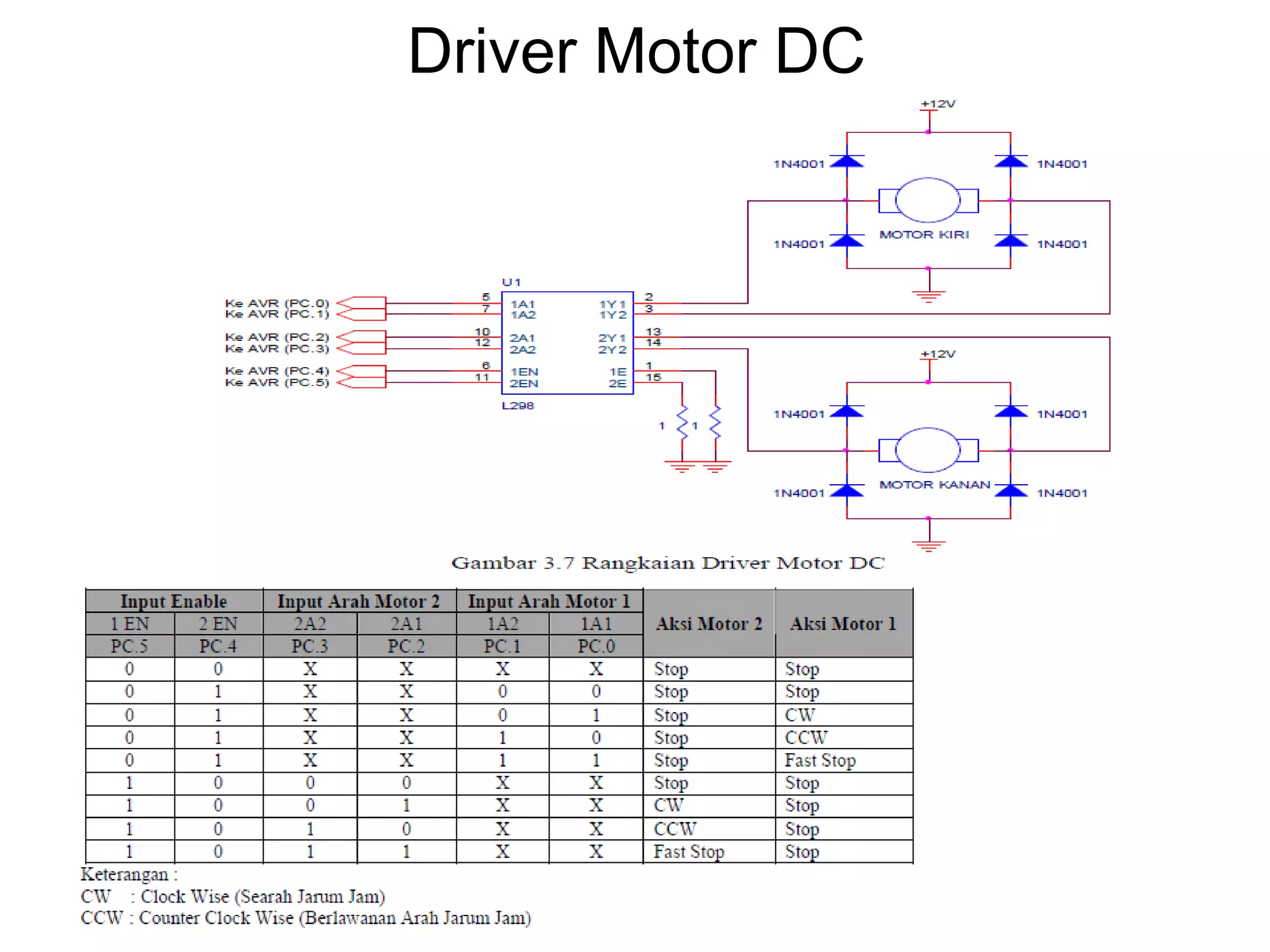
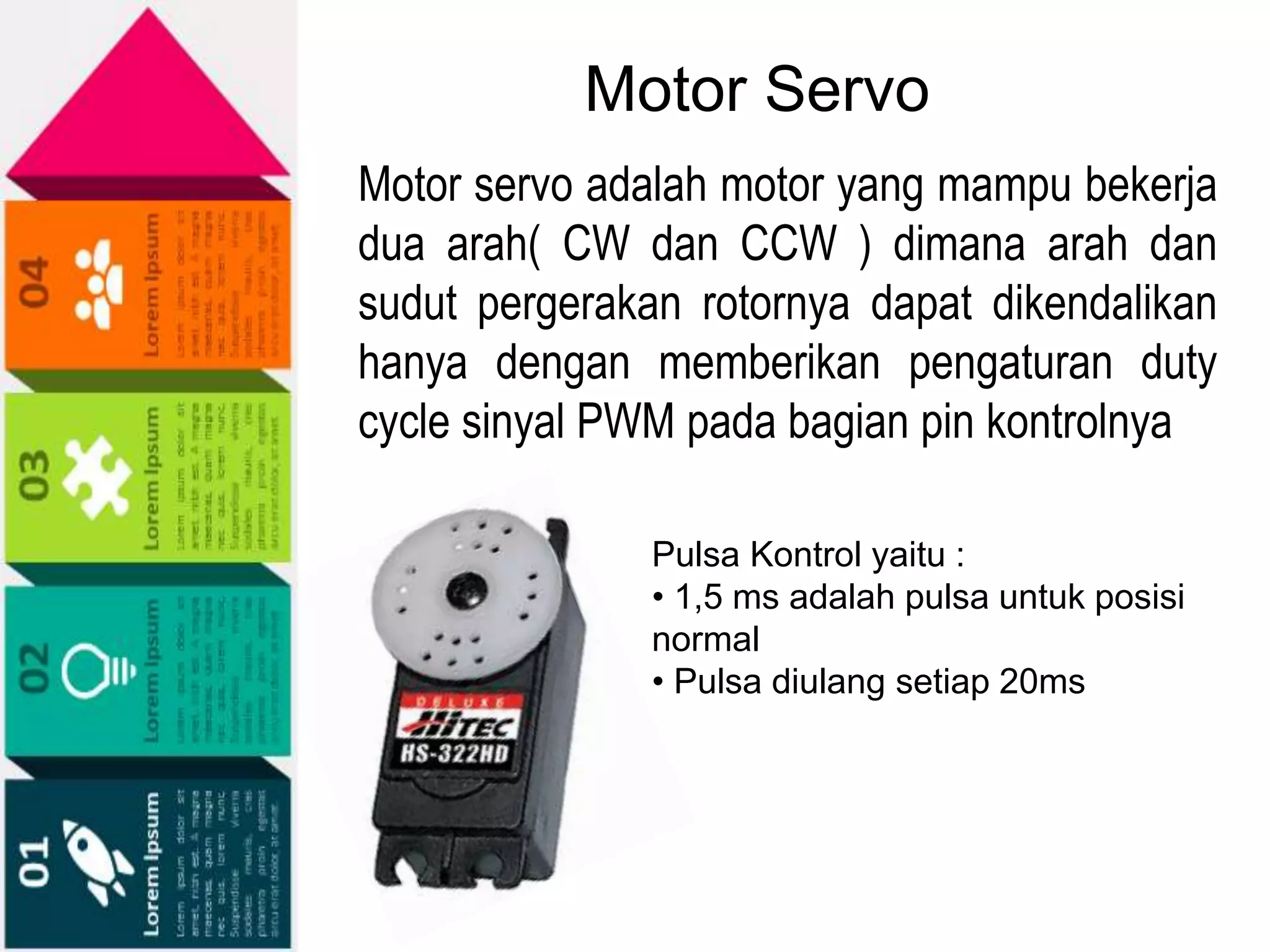
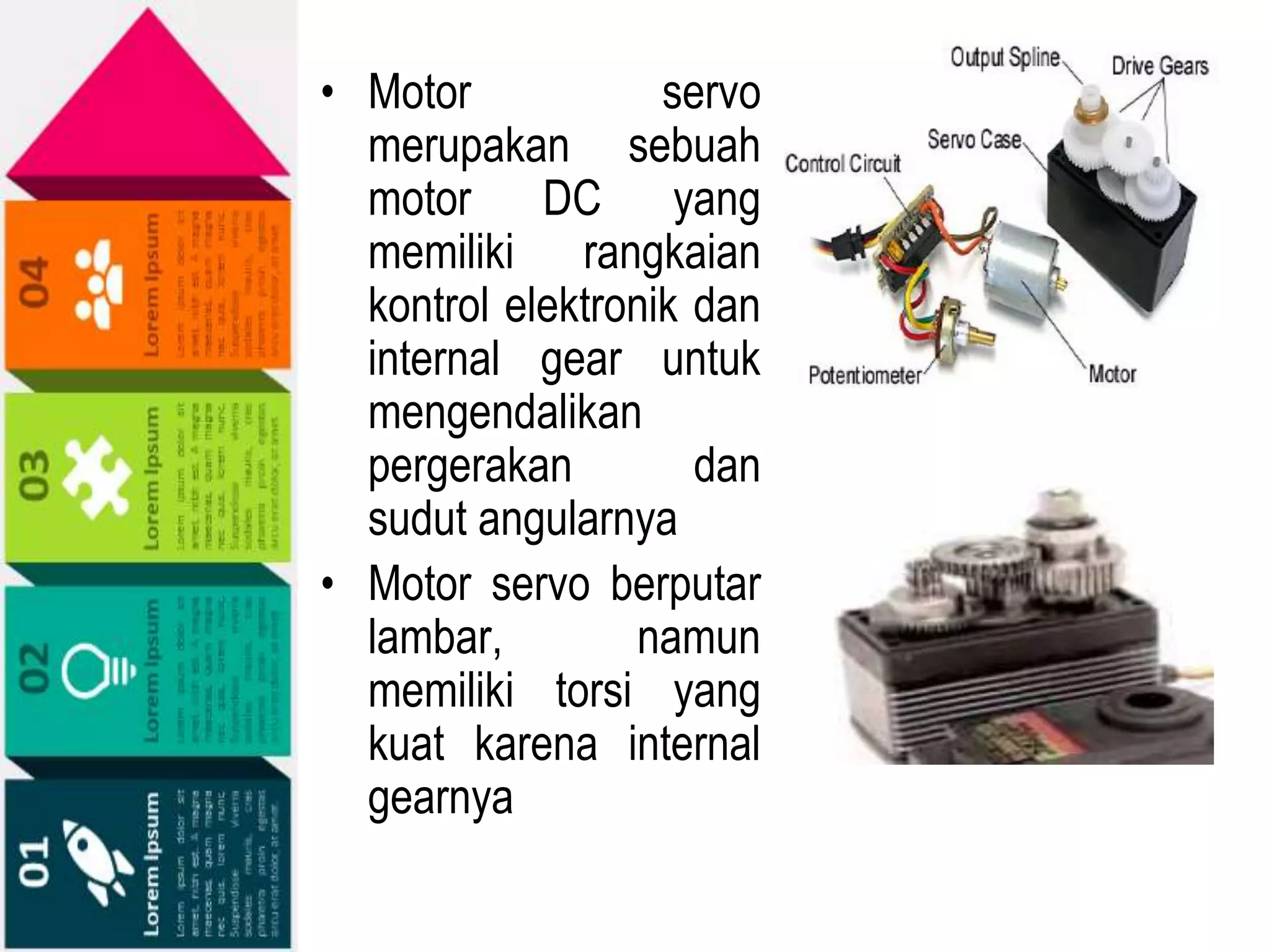












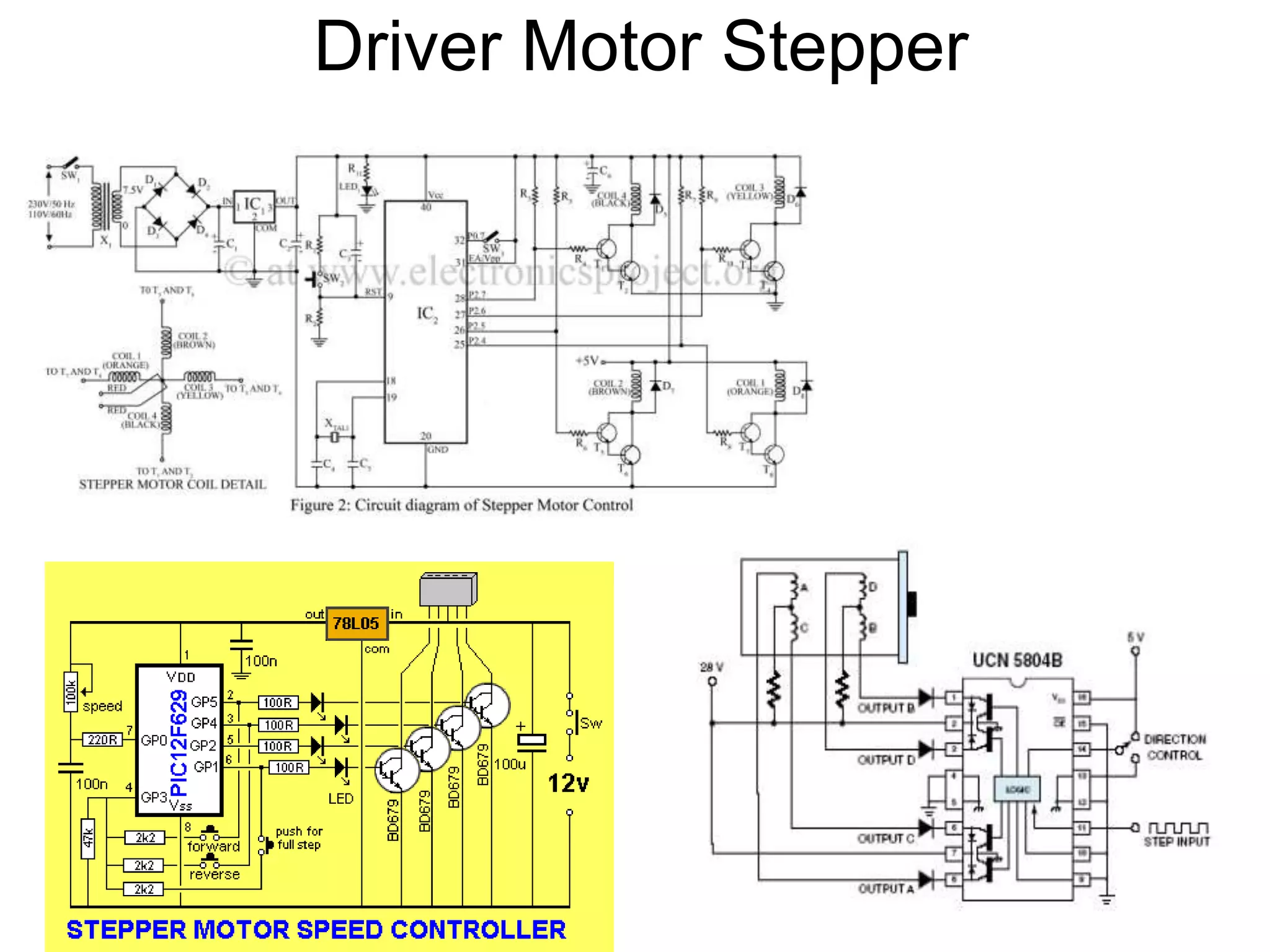

Dokumen tersebut membahas berbagai jenis aktuator listrik yang digunakan dalam sistem kontrol, termasuk selenoid, relay, motor stepper, motor DC, dan motor servo. Aktuator listrik mampu mengubah sinyal listrik menjadi gerakan mekanik dan digunakan untuk berbagai aplikasi seperti robotika.























































































