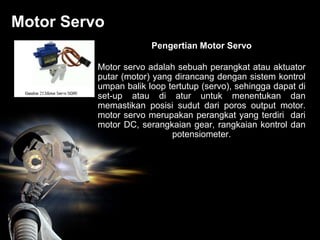
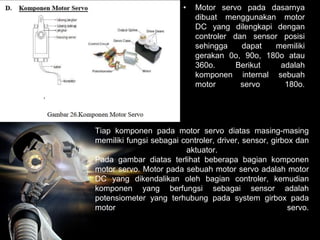
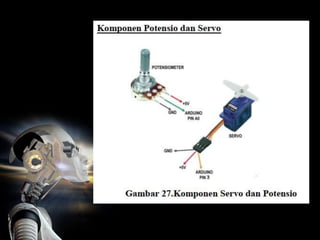
Motor servo adalah aktuator putar yang menggunakan sistem kontrol umpan balik untuk mengatur posisi output. Terdapat berbagai jenis motor servo, termasuk servo AC dan DC, yang digunakan untuk aplikasi berbeda, sementara komponen internal termasuk motor DC, kontroler, dan sensor. Motor servo dikendalikan menggunakan sinyal PWM untuk menentukan posisi sudut dan memiliki kelebihan dalam hal akurasi dan daya, tetapi memerlukan pengaturan yang tepat untuk stabilitas.