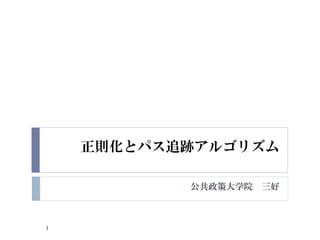
パス追跡アルゴリズム in R1
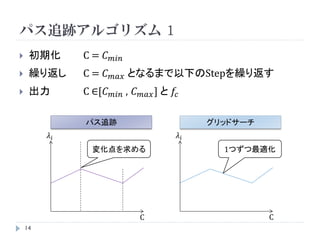
α の推定値
fit <- svmpath(x, y, kernel.function=radial.kernel, param.kernel=sigma)
x …200×2 の2次元 y …200個のラベル(-1,1)
Svmpath
⇒ fit $ lambda : the value of the regularization parameter …C , 0~45の500弱個
⇒ fit $ alpha : αの値 …200×500弱
計算の高速化
system.time(fit <- svmpath(x,y,kernel.function=radial.kernel,param.kernel=sigma))
system.time(for (i in 1:length(C.list))
ksvm(x,y,kernel="rbfdot",kpar=list(sigma=sigma),C=C.list[i]))
僕のPCだと
Cの数…414個 svmpath → 0.11秒 ksvm → 30.01秒でした
18


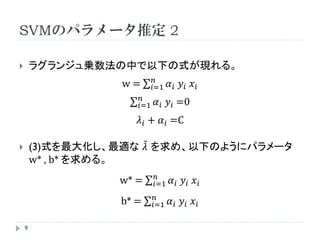
![パス追跡アルゴリズム 1
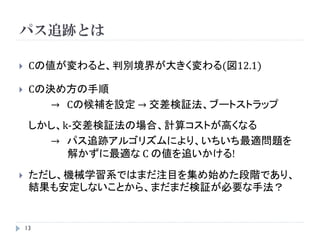
初期化 C = 𝐶 𝑚𝑖𝑛
繰り返し C = 𝐶 𝑚𝑎𝑥 となるまで以下のStepを繰り返す
出力 C ∈[𝐶 𝑚𝑖𝑛 , 𝐶 𝑚𝑎𝑥 ] と 𝑓𝑐
パス追跡 グリッドサーチ
𝜆𝑖 𝜆𝑖
変化点を求める 1つずつ最適化
C C
15](https://image.slidesharecdn.com/12-130304000339-phpapp01/85/12-15-320.jpg)
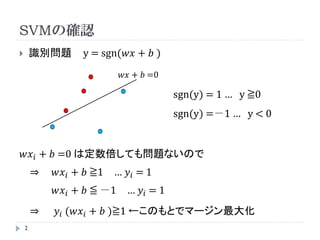
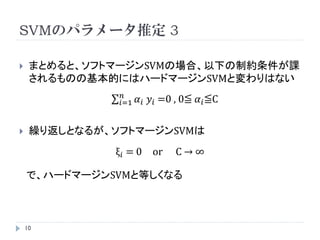
![パス追跡アルゴリズム in R 1
α の推定値
fit <- svmpath(x, y, kernel.function=radial.kernel, param.kernel=sigma)
x …200×2 の2次元 y …200個のラベル(-1,1)
Svmpath
⇒ fit $ lambda : the value of the regularization parameter …C , 0~45の500弱個
⇒ fit $ alpha : αの値 …200×500弱
計算の高速化
system.time(fit <- svmpath(x,y,kernel.function=radial.kernel,param.kernel=sigma))
system.time(for (i in 1:length(C.list))
ksvm(x,y,kernel="rbfdot",kpar=list(sigma=sigma),C=C.list[i]))
僕のPCだと
Cの数…414個 svmpath → 0.11秒 ksvm → 30.01秒でした
18](https://image.slidesharecdn.com/12-130304000339-phpapp01/85/12-18-320.jpg)
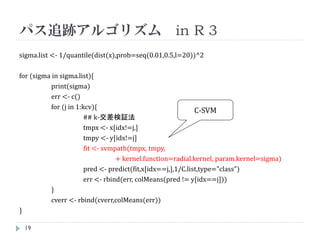
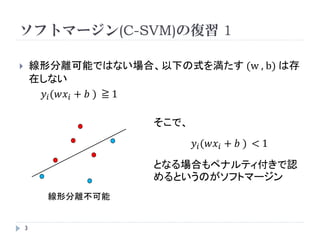
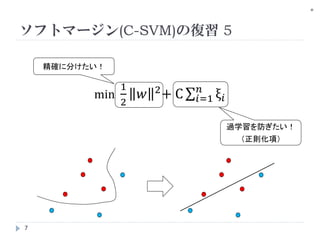
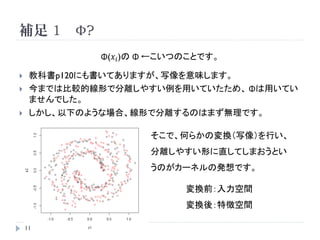
![パス追跡アルゴリズム in R 3
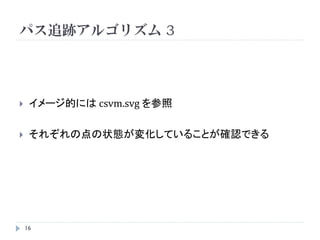
sigma.list <- 1/quantile(dist(x),prob=seq(0.01,0.5,l=20))^2
for (sigma in sigma.list){
print(sigma)
err <- c()
for (j in 1:kcv){
C-SVM
## k-交差検証法
tmpx <- x[idx!=j,]
tmpy <- y[idx!=j]
fit <- svmpath(tmpx, tmpy,
+ kernel.function=radial.kernel, param.kernel=sigma)
pred <- predict(fit,x[idx==j,],1/C.list,type="class")
err <- rbind(err, colMeans(pred != y[idx==j]))
}
cverr <- rbind(cverr,colMeans(err))
}
20](https://image.slidesharecdn.com/12-130304000339-phpapp01/85/12-20-320.jpg)



![[DL輪読会]Control as Inferenceと発展](https://cdn.slidesharecdn.com/ss_thumbnails/20191004-191204055019-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]1次近似系MAMLとその理論的背景](https://cdn.slidesharecdn.com/ss_thumbnails/20190412kondo-190412002418-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]深層強化学習はなぜ難しいのか?Why Deep RL fails? A brief survey of recent works.](https://cdn.slidesharecdn.com/ss_thumbnails/20210115dlohta-210115054939-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Energy-based generative adversarial networks](https://cdn.slidesharecdn.com/ss_thumbnails/energy-basedgenerativeadversarialnetworks-171030102253-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Progressive Growing of GANs for Improved Quality, Stability, and Varia...](https://cdn.slidesharecdn.com/ss_thumbnails/kuboshizuma20180316-180525003941-thumbnail.jpg?width=640&height=640&fit=bounds)







![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)





































![Infinite SVM [改] - ICML 2011 読み会](https://cdn.slidesharecdn.com/ss_thumbnails/isvm-icml11a-110719050617-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





