まとめ
線形代数と信号処理の関連について確認
スパース表現の信号復元における有用性を概説
畳み込みネットワークを利用したモデリングを紹介
参考文献
1. 村松正吾,「MATLABによる画像&映像信号処理」,CQ出版 (2007/5)
2. 鈴木大慈,「確率的最適化」,講談社 (2015/8)
3. 冨岡亮太, 「スパース性に基づく機械学習」,講談社 (2015/12)
4. 金森敬文,鈴木大慈,竹内一郎,佐藤一誠, 「機械学習のための連続最適化」 ,講談社 (2016/12)
5. 永原正章,「スパースモデリング~基礎から動的システムへの応用~」 ,コロナ社 (2017/10)
6. Michael Elad(著),玉木徹(訳),「スパースモデリング:ℓ1/ℓ0ノルム最小化の基礎理論と画像処理への応用」,共立出版 (2016/4)
7. 小野峻佑,”コンピュータビジョンにおける凸最適化”,米谷竜,斎藤英雄(編),「コンピュータビジョンー広がる要素技術と応用ー」, pp.121-140, 共立出版 (2018/6)
8. K. Gregor and Y. LeCun, “Learning fast approximations of sparse coding,” in Proc. 27th Int. Conf. Machine Learning, pp. 399–406 (2010/6).
9. L. Condat, "A Primal-Dual Splitting Method for Convex Optimization Involving Lipschitzian, Proximable and Linear Composite Terms", in Journal of Optimization
Theory and Applications, vol. 158, no.2, pp.460-479 (2013/8).
10. S. Muramatsu, "Structured dictionary learning with 2-D non-separable oversampled lapped transform," 2014 IEEE International Conference on Acoustics,
Speech and Signal Processing (ICASSP), pp. 2624-2628 (2014/5).
11. N. Komodakis and J. Pesquet, "Playing with Duality: An overview of recent primal-dual approaches for solving large-scale optimization problems," in IEEE
Signal Processing Magazine, vol. 32, no. 6, pp. 31-54 (2015/11).
12. S. Muramatsu, M. Ishii and Z. Chen, "Efficient parameter optimization for example-based design of nonseparable oversampled lapped transform," 2016 IEEE
International Conference on Image Processing (ICIP), pp. 3618-3622 (2016/9).
13. S. Muramatsu, K. Furuya and N. Yuki, “Multidimensional nonseparable oversampled lapped transforms: theory and design,” in IEEE Transactions on Signal
Processing, vol. 65, no. 5, pp. 1251-1264 (2017/3).
14. K. H. Jin, M. T. McCann, E. Froustey and M. Unser, "Deep Convolutional Neural Network for Inverse Problems in Imaging," in IEEE Transactions on Image
Processing, vol. 26, no. 9, pp. 4509-4522 (2017/9).
15. M. T. McCann, K. H. Jin and M. Unser, "Convolutional Neural Networks for Inverse Problems in Imaging: A Review," in IEEE Signal Processing Magazine, vol.
34, no. 6, pp. 85-95 (2017/11).
16. A. Lucas, M. Iliadis, R. Molina and A. K. Katsaggelos, "Using Deep Neural Networks for Inverse Problems in Imaging: Beyond Analytical Methods," in IEEE
Signal Processing Magazine, vol. 35, no. 1, pp. 20-36 (2018/1).
17. J. Sulam, V. Papyan, Y. Romano and M. Elad, "Multilayer Convolutional Sparse Modeling: Pursuit and Dictionary Learning," in IEEE Transactions on Signal
Processing, vol. 66, no. 15, pp. 4090-4104, 1 (2018/8).
2019/1/17 秋田県立大学 画像信号処理 72


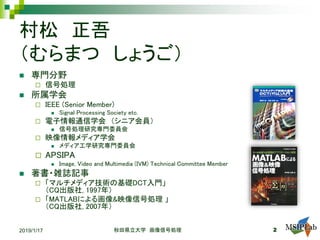




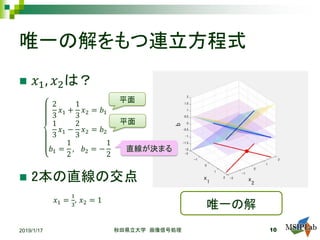




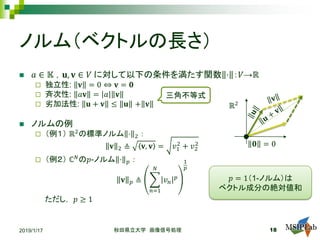


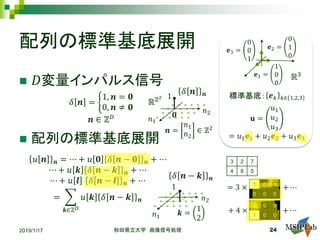







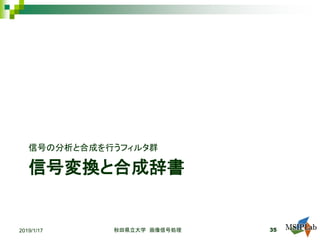
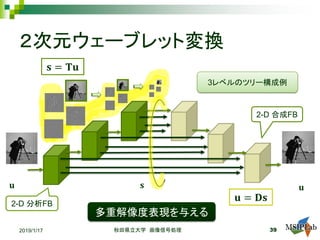
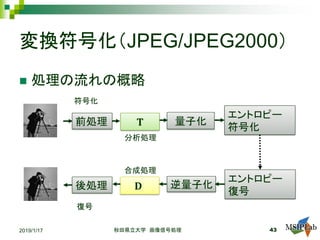


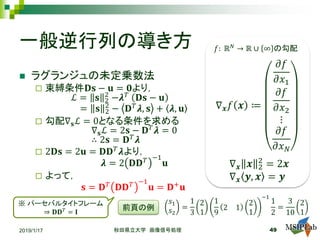
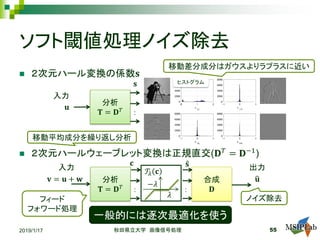
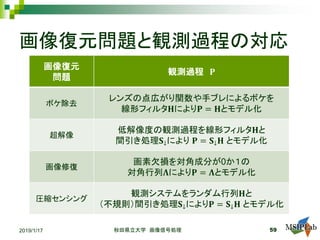
![1-ノルム最小化の意義
0-擬ノルム最小化問題
2019/1/17 秋田県立大学 画像信号処理 50
�𝐬𝐬 = arg min𝐬𝐬∈ℝ𝐿𝐿 𝐬𝐬 0 s. t 𝐮𝐮 = 𝐃𝐃𝐬𝐬
𝐯𝐯 0 ≔ lim
𝑝𝑝→+0
�
𝑛𝑛=1
𝑁𝑁
𝑣𝑣𝑛𝑛
𝑝𝑝
= 𝑛𝑛 𝑣𝑣𝑛𝑛 ≠ 0
= …+ +
𝐝𝐝𝑛𝑛1
𝐝𝐝𝑛𝑛 𝐾𝐾
・ ・
𝑠𝑠𝑛𝑛1
𝑠𝑠𝑛𝑛 𝐾𝐾
非零係数の数
1-ノルムは0-擬ノルムの凸緩和
… 凸関数𝑓𝑓: 𝑉𝑉 → (−∞, ]∞
𝑓𝑓 𝛼𝛼𝒙𝒙 + 1 − 𝛼𝛼 𝒚𝒚
≤ 𝛼𝛼𝑓𝑓 𝒙𝒙 + 1 − 𝛼𝛼 𝑓𝑓 𝒚𝒚
ただし, 0 ≤ 𝛼𝛼 ≤ 1
最小化→凸最適化問題
少ない要素画像で
スパースに表現
組み合わせ最適化問題
零係数の
要素画像
使わない
NP
困難
非凸関数
軸上](https://image.slidesharecdn.com/multidimensionalsignalandimagerestorationwithsparsemodeling-190118091303/85/slide-50-320.jpg)
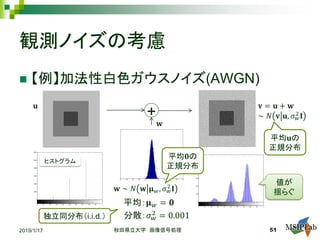

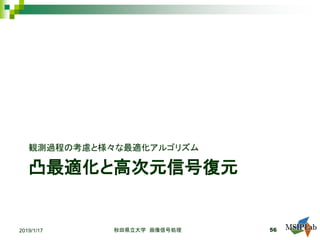
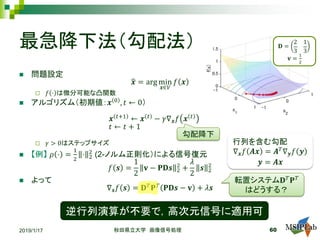


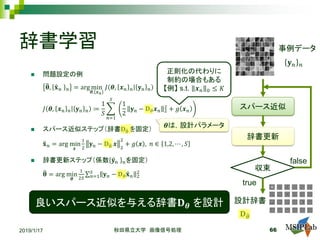

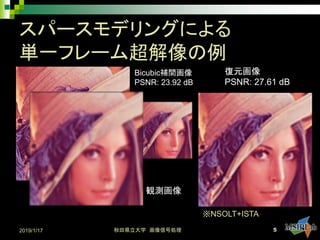
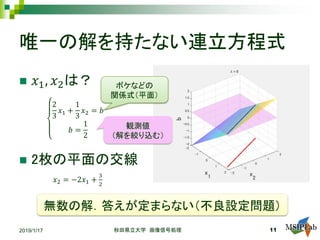
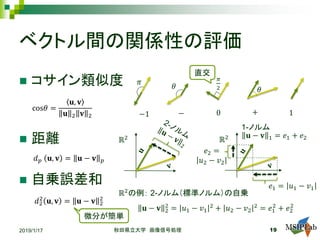
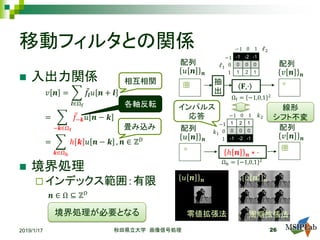
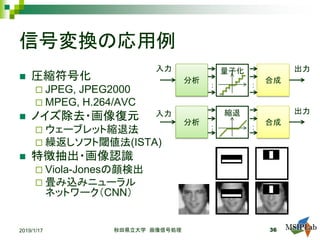
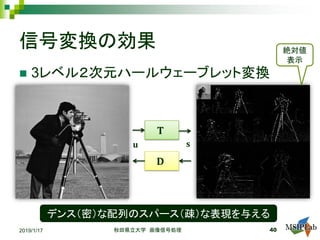
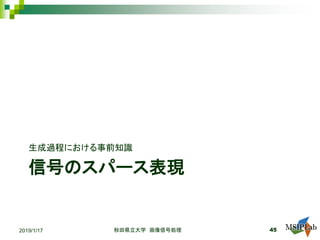
![二次元畳み込み辞書の学習例
Lenaによる学習辞書(合成フィルタバンク)
二次元非分離冗長重複変換(2D-NSOLT)
[Muramatsu+,ICASSP2014]
2019/1/17 秋田県立大学 画像信号処理 68
事例 学習辞書(パーセバルタイトフレーム)](https://image.slidesharecdn.com/multidimensionalsignalandimagerestorationwithsparsemodeling-190118091303/85/slide-68-320.jpg)
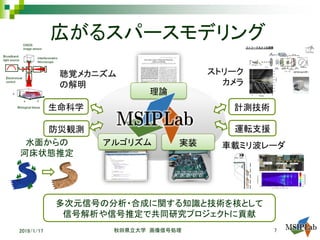
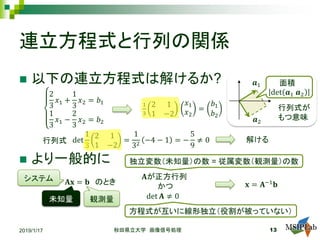
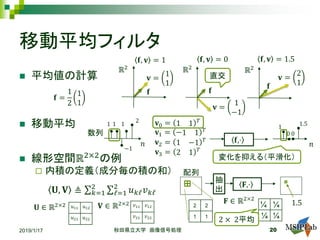
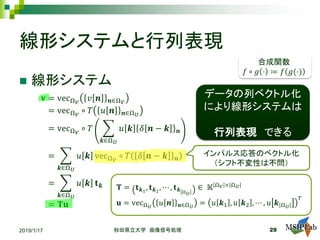
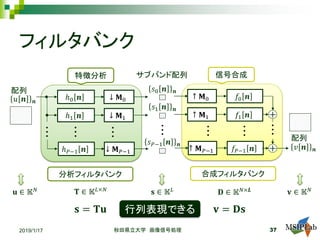
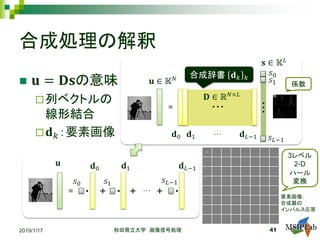
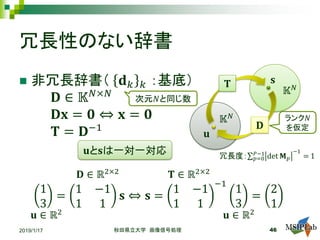
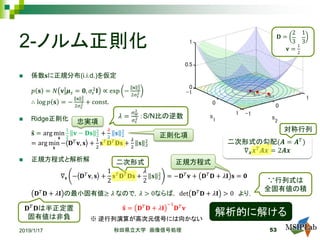
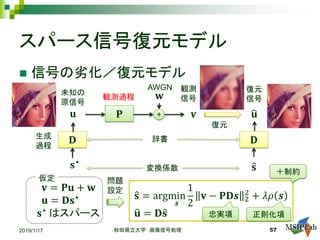
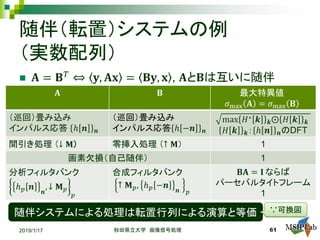
![三次元畳み込み辞書の学習例
MRbrainによる学習辞書(合成フィルタバンク)
三次元非分離冗長重複変換(3D-NSOLT)
[Muramatsu+,ICIP2016]
2019/1/17 秋田県立大学 画像信号処理
事例 学習辞書(パーセバルタイトフレーム)](https://image.slidesharecdn.com/multidimensionalsignalandimagerestorationwithsparsemodeling-190118091303/85/slide-69-320.jpg)
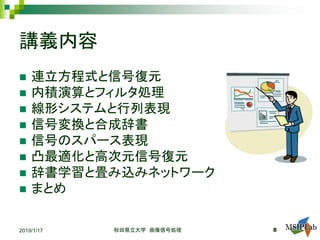
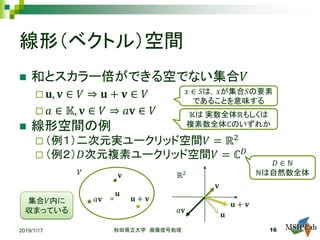
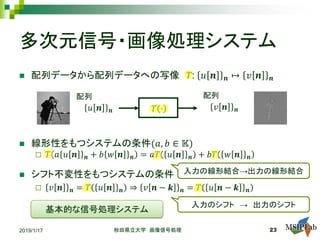
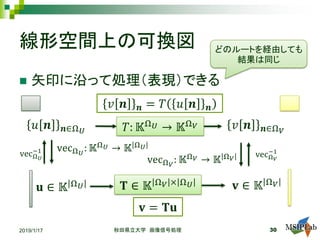
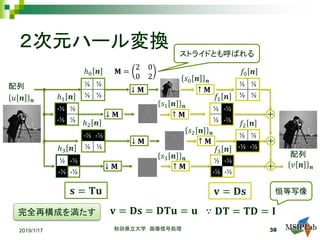
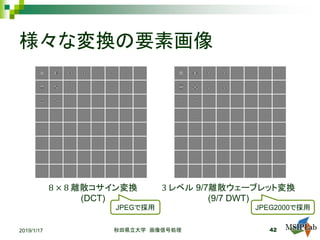
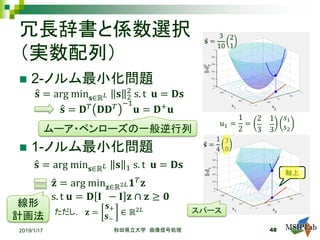
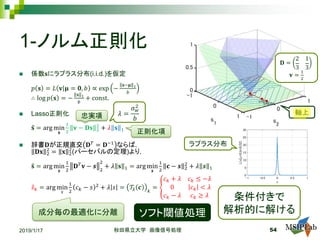
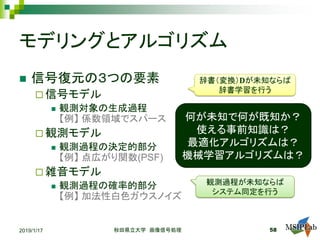
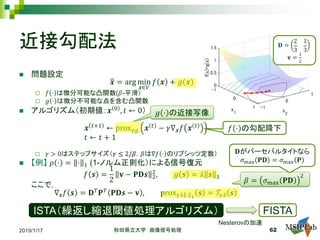
![ 学習ISTA(LISTA)[Gregor+,ICML2010]
多層畳み込みスパース符号化(ML-CSC)[Sulam+, TSP2018]
𝐽𝐽 𝑫𝑫ℓ ℓ, 𝒙𝒙𝑛𝑛 𝑛𝑛 𝐲𝐲𝑛𝑛 𝑛𝑛 ≔
1
𝑆𝑆
�
𝑛𝑛=1
𝑆𝑆
1
2
𝐲𝐲𝑛𝑛 − 𝑫𝑫1 𝑫𝑫2 ⋯ 𝑫𝑫𝐼𝐼 𝒙𝒙𝑛𝑛 2
2
+ 𝑔𝑔 𝒙𝒙𝑛𝑛 + �
ℓ=1
𝐼𝐼
ℎ 𝑫𝑫ℓ
※𝑾𝑾 = 𝐈𝐈 − 𝛾𝛾𝐃𝐃𝑇𝑇
𝐃𝐃 ⇒ISTA𝒯𝒯𝛾𝛾𝛾𝛾(⋅)
フィードフォワード展開
2019/1/17 秋田県立大学 画像信号処理 70
𝑻𝑻
𝑾𝑾 + ++
𝐲𝐲
𝑾𝑾 𝑾𝑾
𝐱𝐱 0
𝐱𝐱 1
𝐱𝐱 T−1 順伝播
※𝑻𝑻 = 𝛾𝛾𝐃𝐃𝑇𝑇
⇒ISTA
𝛿𝛿𝐱𝐱 T = 𝐱𝐱⋆ − �𝐱𝐱
順伝播順伝播
逆伝播逆伝播逆伝播𝛿𝛿𝑾𝑾, 𝛿𝛿𝑻𝑻, 𝛿𝛿𝛿𝛿 𝛿𝛿𝐱𝐱 T−1𝛿𝛿𝐱𝐱 1𝛿𝛿𝐱𝐱 0
スパース近似
パラメータ更新
�𝐱𝐱 = 𝐱𝐱 T
畳み込み辞書の縦続接続
係数正則化
辞書正則化
スパース係数
データ](https://image.slidesharecdn.com/multidimensionalsignalandimagerestorationwithsparsemodeling-190118091303/85/slide-70-320.jpg)
![非線形辞書への一般化
第𝑛𝑛番目事例の誤差エネルギー:𝐸𝐸𝑛𝑛 𝜽𝜽 =
1
2
𝐲𝐲𝑛𝑛 − 𝒈𝒈𝜽𝜽(�𝐱𝐱 𝑛𝑛) 2
2
=
1
2
𝒓𝒓𝑛𝑛 𝜽𝜽 2
2
∇𝜽𝜽 𝐸𝐸𝑛𝑛 𝜽𝜽 𝑞𝑞 =
𝜕𝜕
𝜕𝜕𝜃𝜃𝑞𝑞
𝐸𝐸𝑛𝑛 𝜽𝜽 = − 𝒓𝒓𝑛𝑛 𝜽𝜽 ,
𝜕𝜕
𝜕𝜕𝜃𝜃𝑞𝑞
𝒈𝒈𝜽𝜽(�𝐱𝐱𝑛𝑛)
もし, 𝒈𝒈𝜽𝜽(⋅) = 𝒇𝒇𝐼𝐼 ∘ 𝒇𝒇𝐼𝐼−1 ∘ ⋯ ∘ 𝒇𝒇1 ⋅ (かつ、微分可能)
⇒ ∇𝜽𝜽 𝐸𝐸𝑛𝑛 𝜽𝜽 𝑞𝑞𝑖𝑖, 𝑘𝑘
= −
𝜕𝜕𝒇𝒇𝑖𝑖+1
𝜕𝜕𝒇𝒇𝑖𝑖
𝑇𝑇
⋯
𝜕𝜕𝒇𝒇𝐼𝐼−1
𝜕𝜕𝒇𝒇𝐼𝐼−2
𝑇𝑇
𝜕𝜕𝒇𝒇𝐼𝐼
𝜕𝜕𝒇𝒇𝐼𝐼−1
𝑇𝑇
𝒓𝒓𝑛𝑛 𝜽𝜽 ,
𝜕𝜕
𝜕𝜕𝜃𝜃𝑞𝑞𝑖𝑖, 𝑘𝑘
𝒇𝒇𝑖𝑖 ∘ 𝒇𝒇𝑖𝑖−1 ∘ ⋯ ∘ 𝒇𝒇1 �𝐱𝐱𝑛𝑛
【例】 𝒇𝒇𝜽𝜽𝑖𝑖
𝒙𝒙 = 𝜙𝜙𝑖𝑖 𝑭𝑭𝑖𝑖 𝒙𝒙 (𝑭𝑭𝑖𝑖:合成フィルタバンク, 𝜙𝜙𝑖𝑖:要素毎の非線形関数)
畳み込みニューラルネット(CNN)
非可微分関数(ReLU),順序統計処理(Max pooling)も利用
信号復元応用では観測過程と生成過程を混在させて学習
【例】 残差学習U-net [Jin+,TIP2017]
2019/1/17 秋田県立大学 画像信号処理 71
非線形辞書
𝒈𝒈𝜽𝜽: ℝ𝐿𝐿
→ ℝ𝑁𝑁
𝜕𝜕𝒇𝒇
𝜕𝜕𝒙𝒙
≔
𝜕𝜕𝑓𝑓1
𝜕𝜕𝑥𝑥1
⋯
𝜕𝜕𝑓𝑓1
𝜕𝜕𝑥𝑥𝑁𝑁
⋮ ⋱ ⋮
𝜕𝜕𝑓𝑓𝑀𝑀
𝜕𝜕𝑥𝑥1
⋯
𝜕𝜕𝑓𝑓𝑀𝑀
𝜕𝜕𝑥𝑥𝑁𝑁
𝜕𝜕
𝜕𝜕𝒙𝒙
𝑨𝑨𝑨𝑨 = 𝑨𝑨
𝜕𝜕𝒇𝒇 ∘ 𝒈𝒈
𝜕𝜕𝒙𝒙
=
𝜕𝜕𝒇𝒇
𝜕𝜕𝒈𝒈
𝜕𝜕𝒈𝒈
𝜕𝜕𝒙𝒙
誤差逆伝播
+
skip connection
U-net
大量のデータと(試行錯誤的な)
アーキテクチャ,アルゴリズムの工夫により
パラメータを最適化
𝐯𝐯 �𝐮𝐮
𝜃𝜃𝑞𝑞𝑖𝑖, 𝑘𝑘
は𝒇𝒇𝑖𝑖(⋅)のパラメータ](https://image.slidesharecdn.com/multidimensionalsignalandimagerestorationwithsparsemodeling-190118091303/85/slide-71-320.jpg)






![SSII2022 [SS2] 少ないデータやラベルを効率的に活用する機械学習技術 〜 足りない情報をどのように補うか?〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss2ssii2022-220607054716-2760bd30-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)





![[DL輪読会]Neural Ordinary Differential Equations](https://cdn.slidesharecdn.com/ss_thumbnails/nnasode1-190111001755-thumbnail.jpg?width=640&height=640&fit=bounds)

































