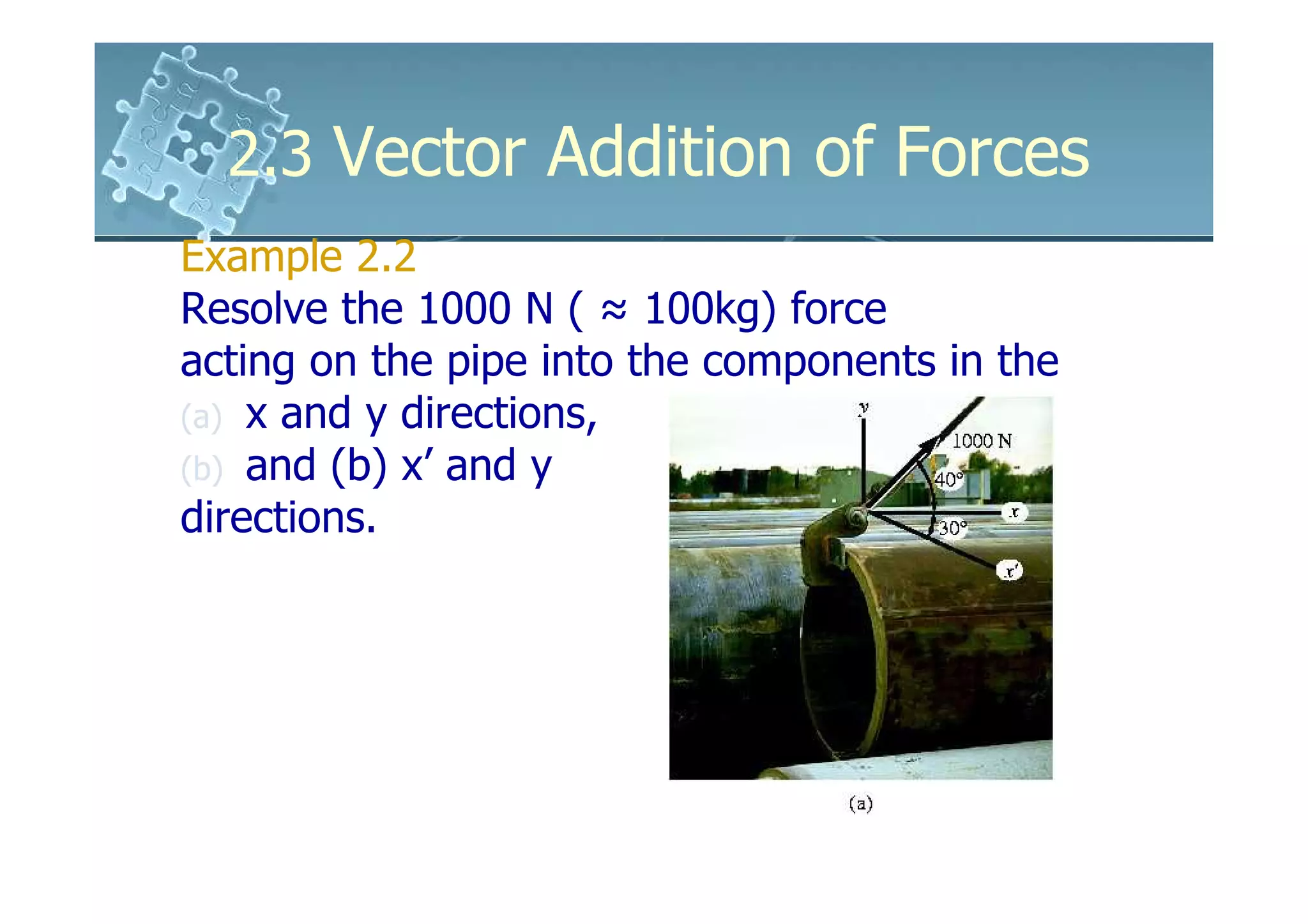
1) The document discusses vector addition of forces using the parallelogram law and trigonometry.
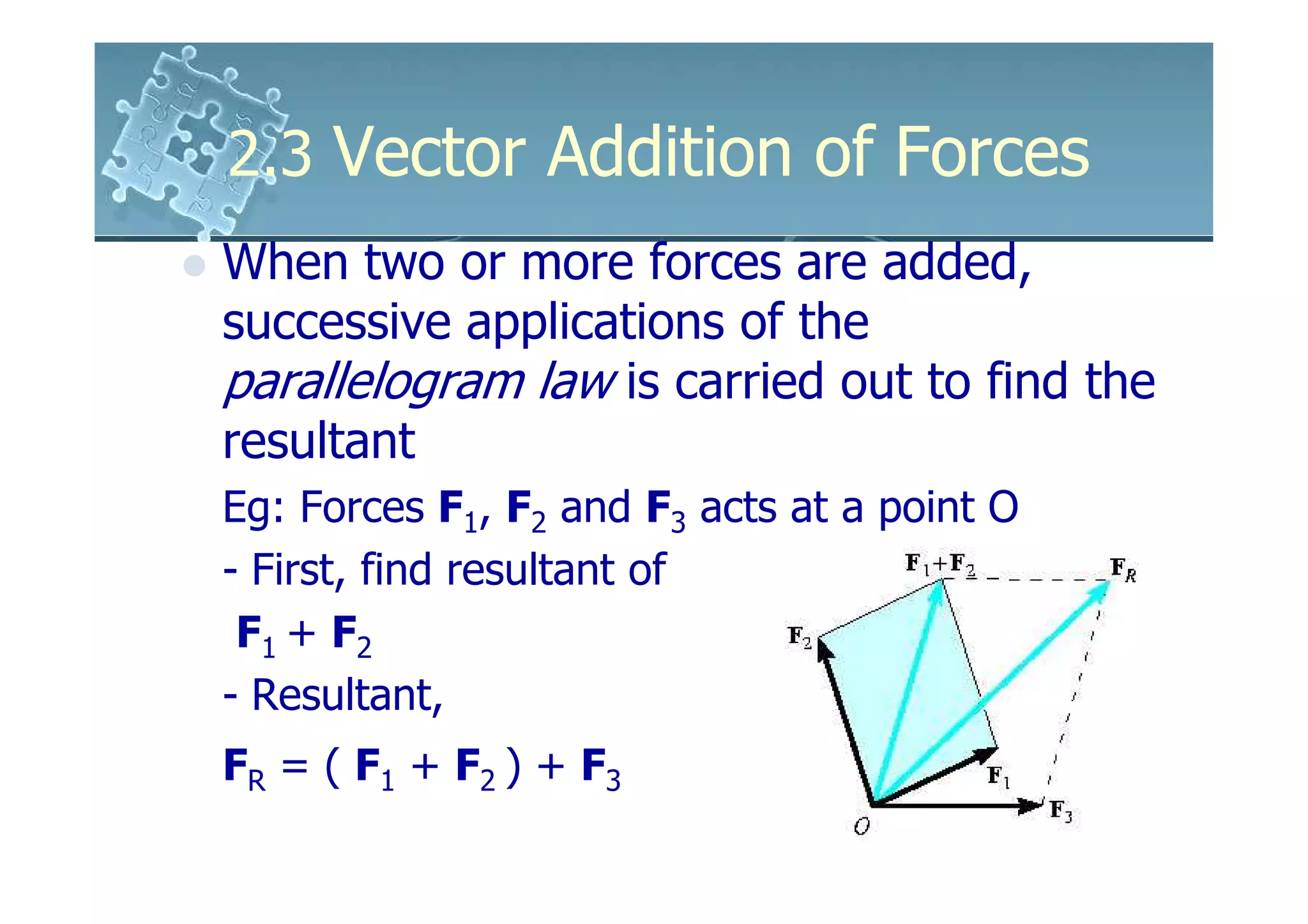
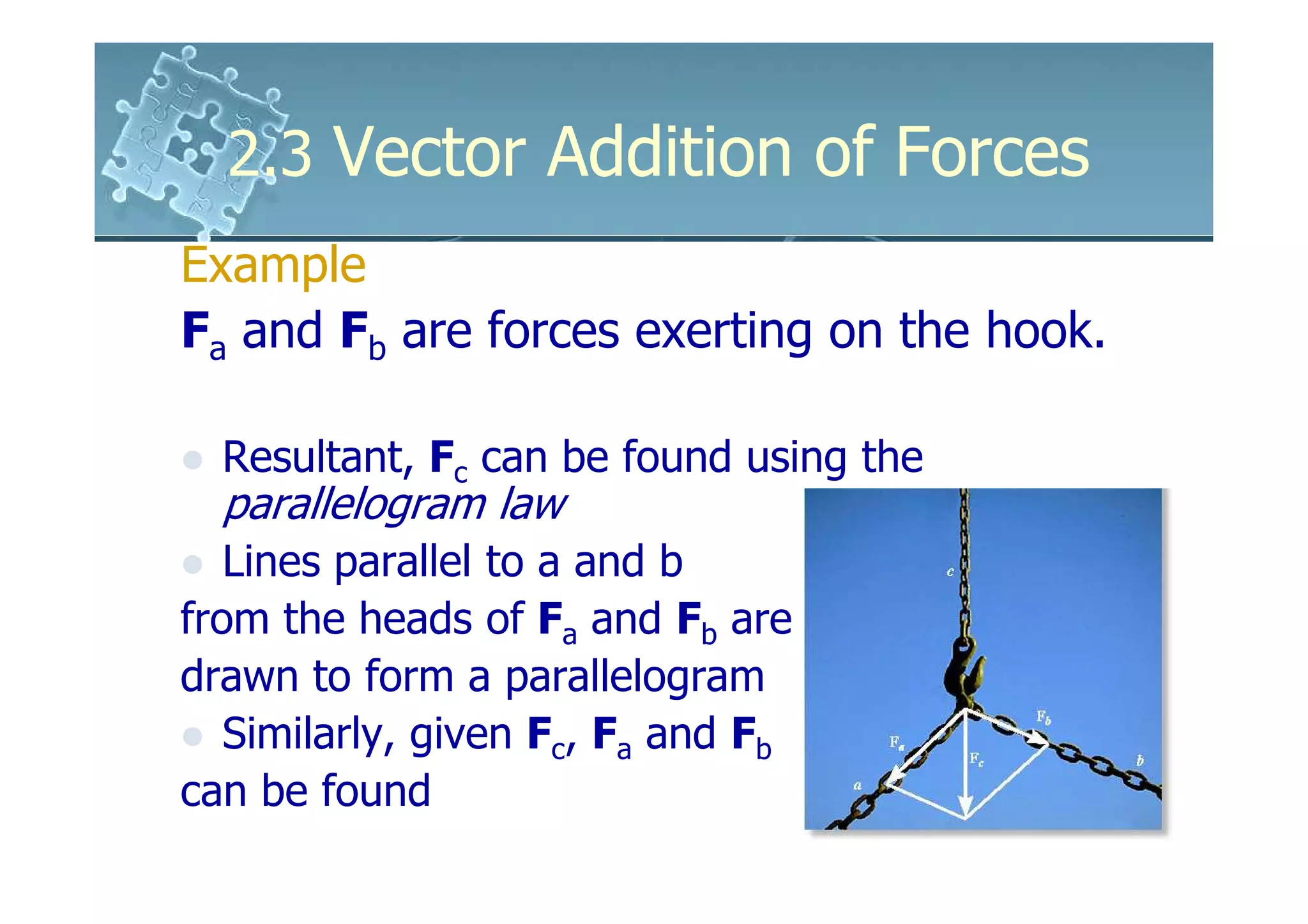
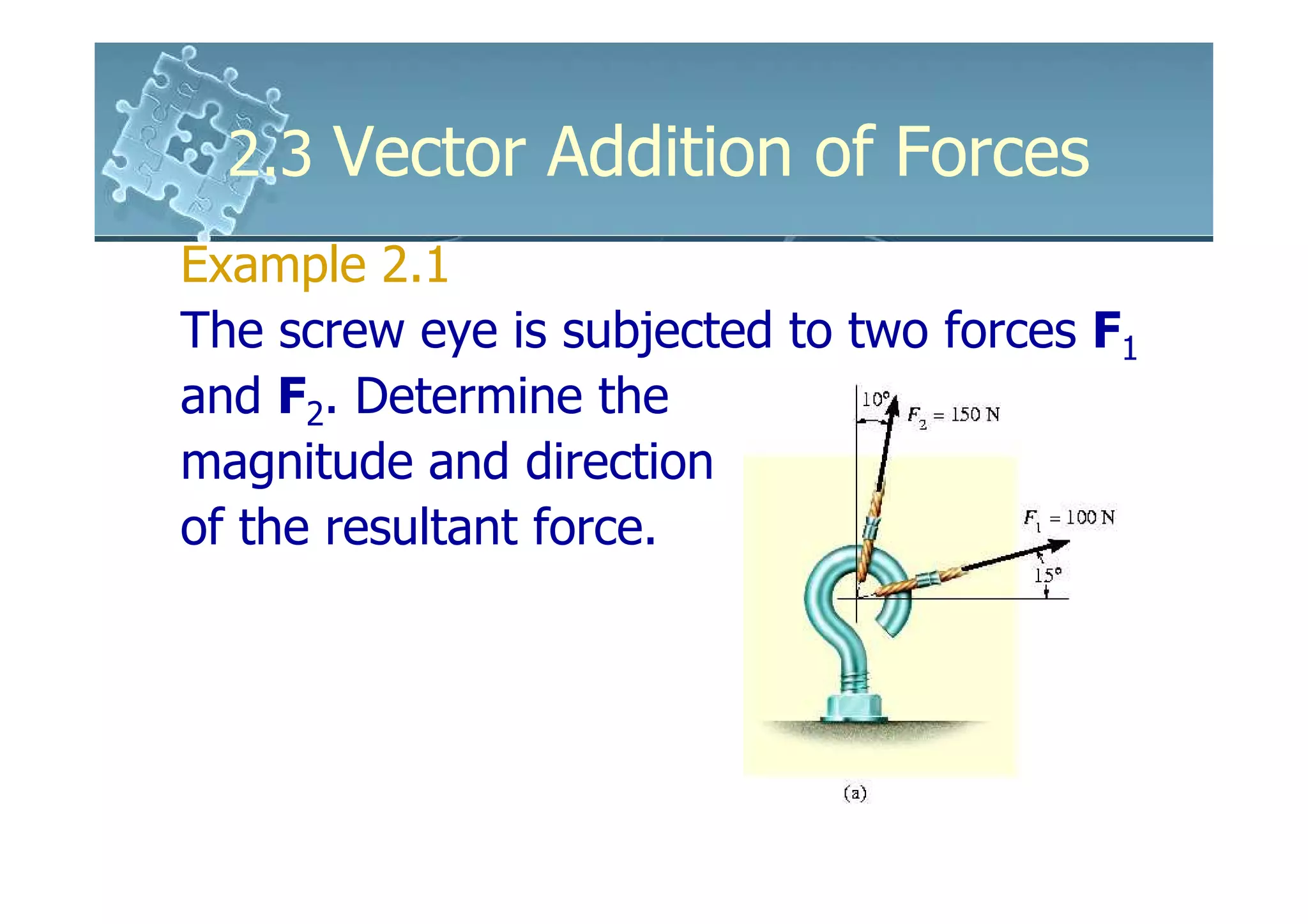
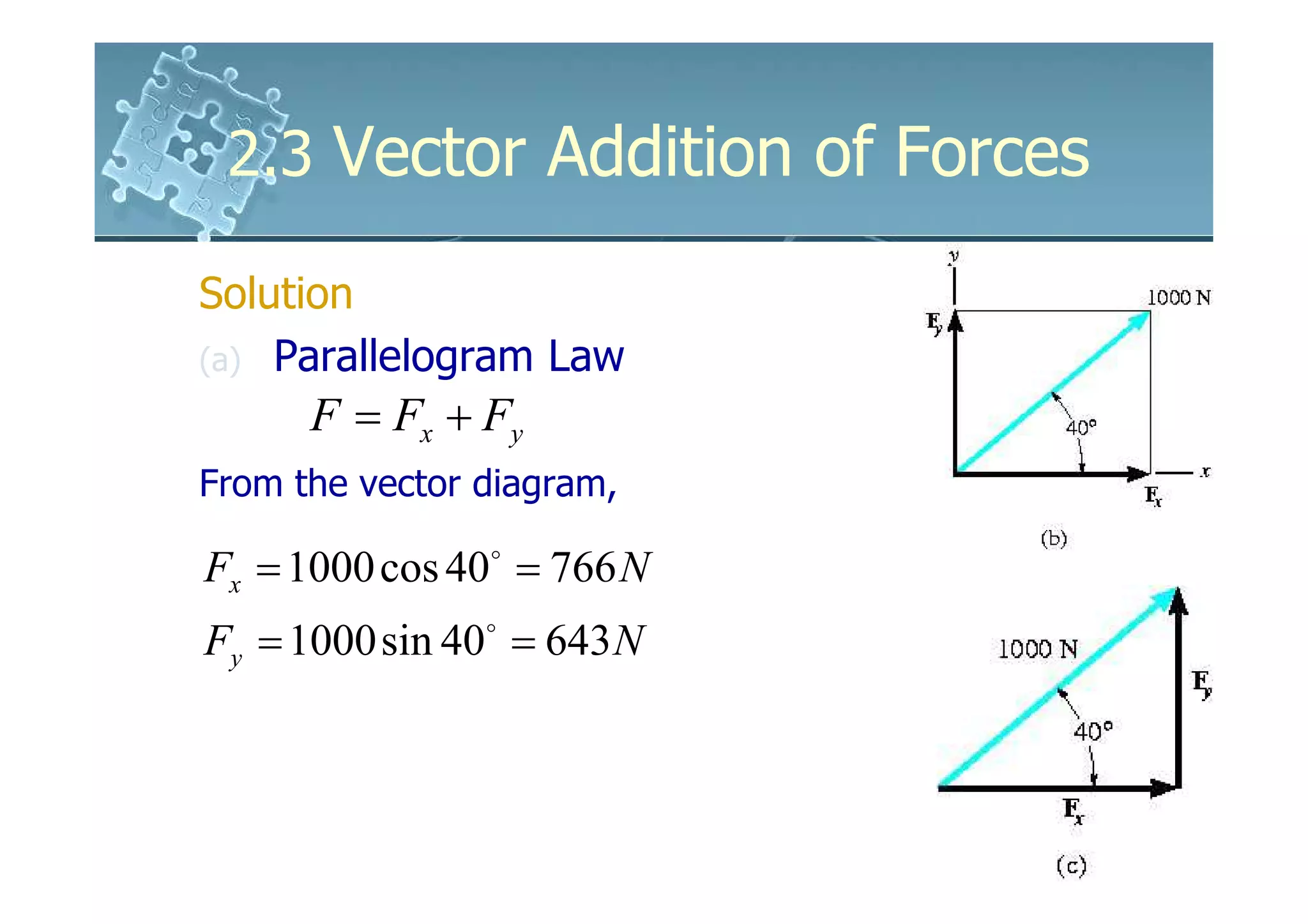
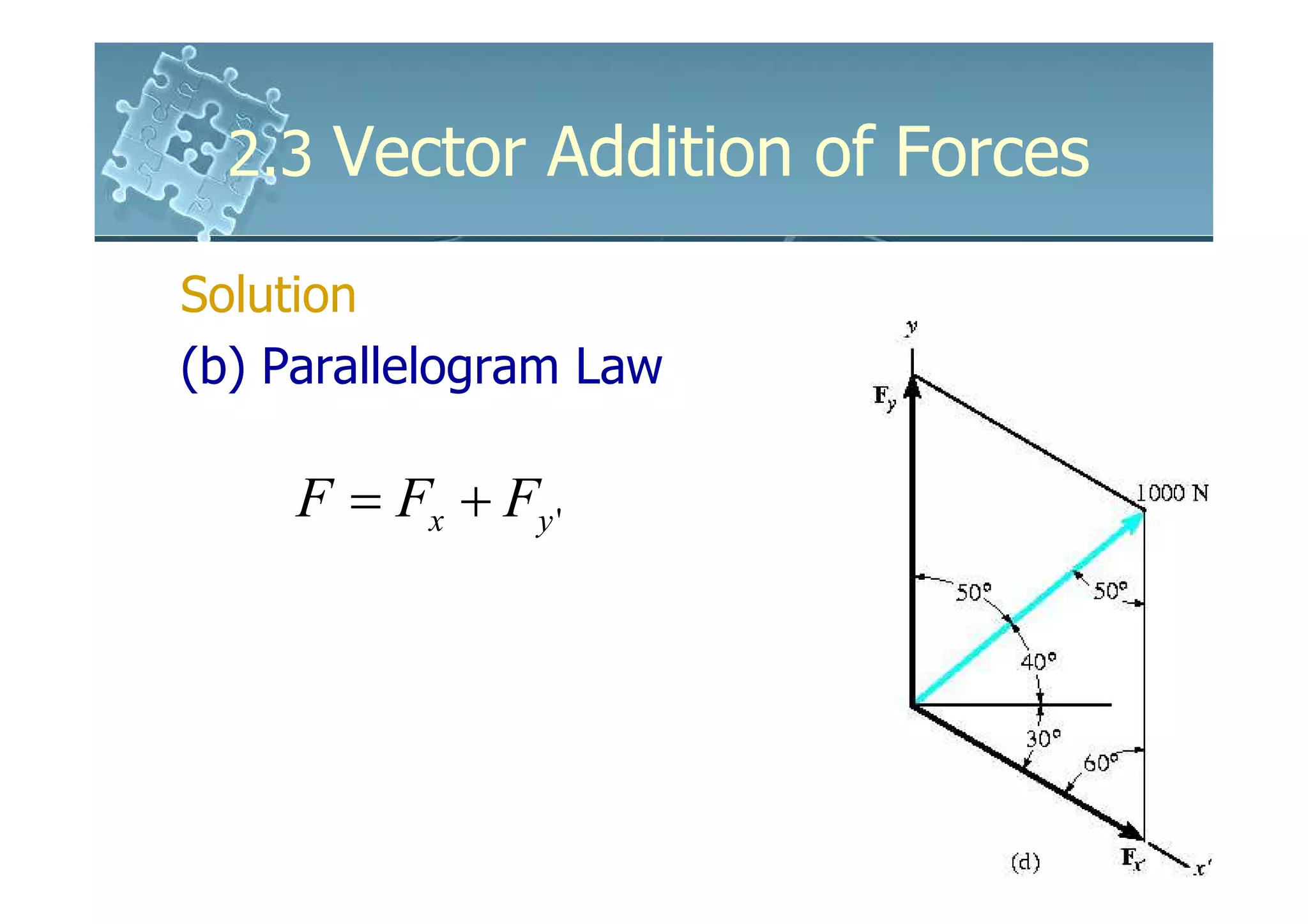
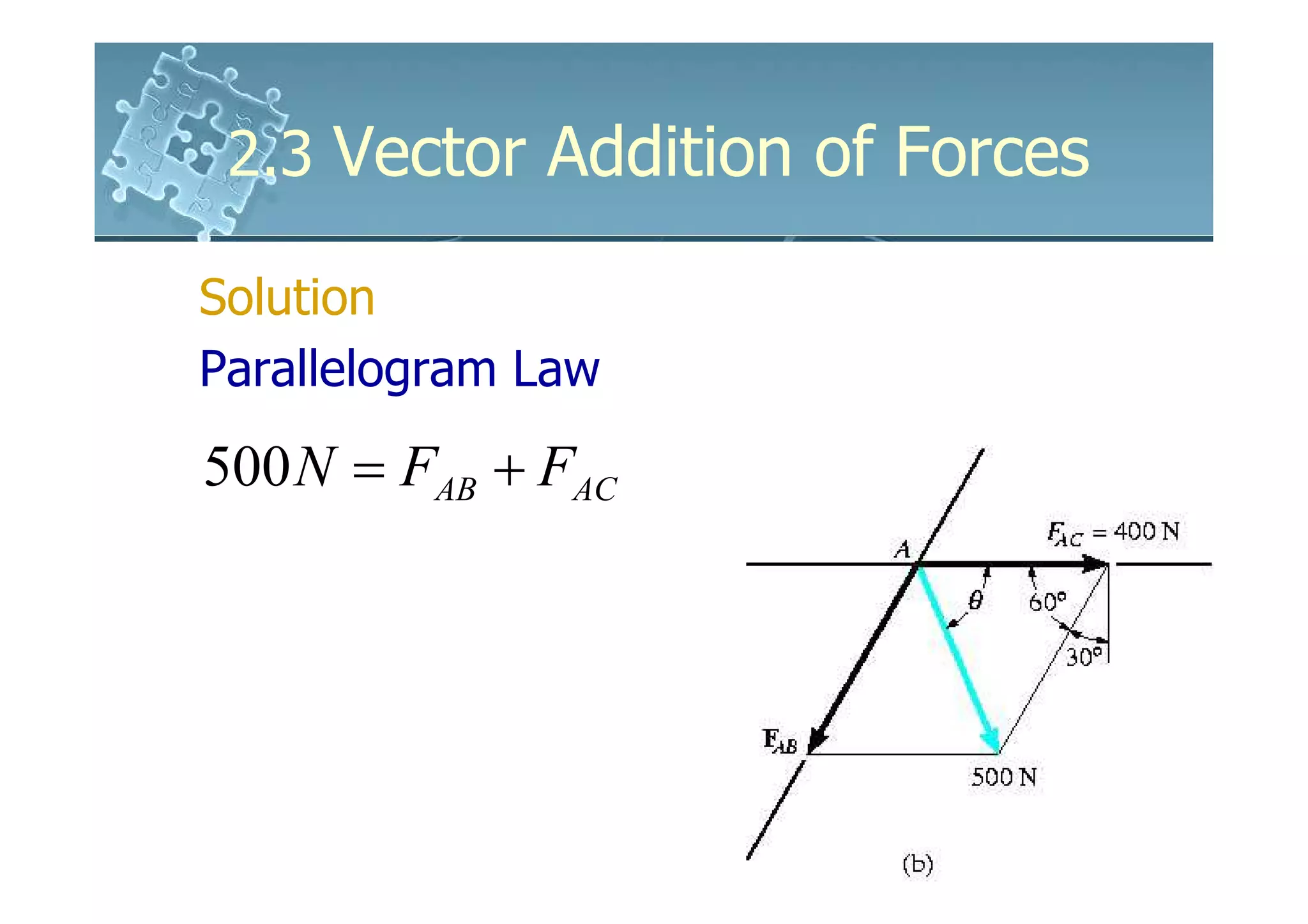
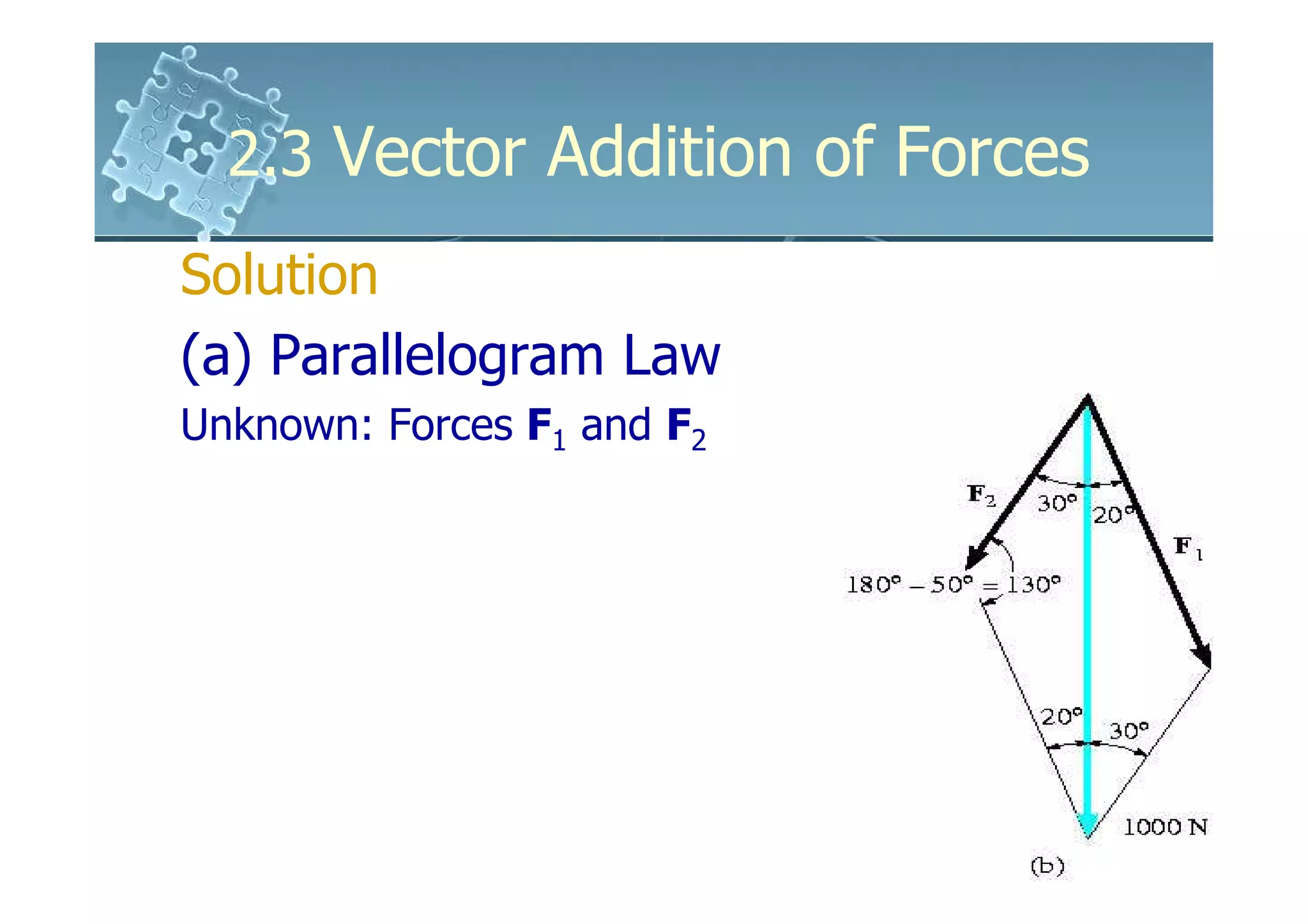
2) Forces can be added by constructing a parallelogram with the force vectors as sides and the resultant vector as the diagonal.
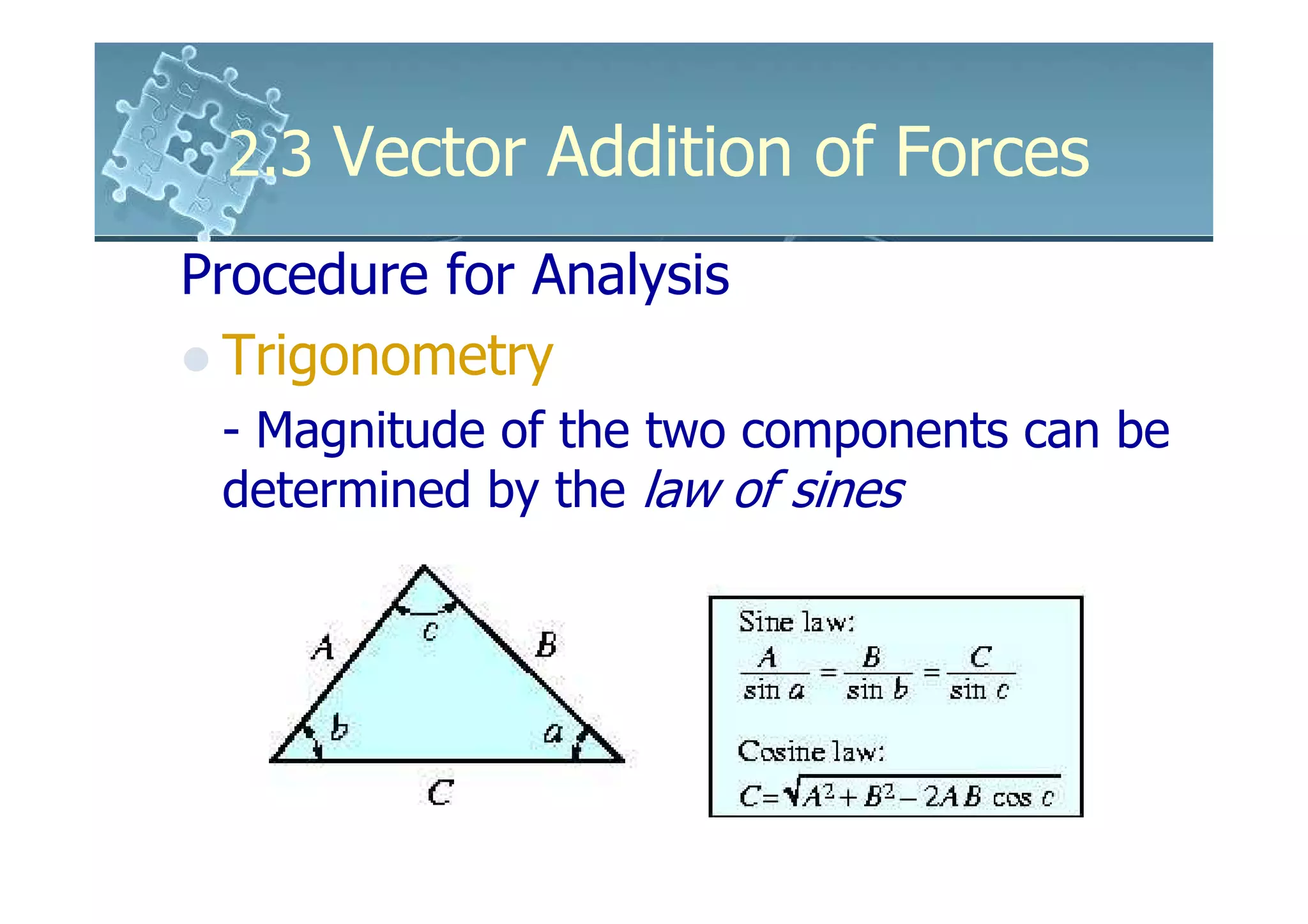
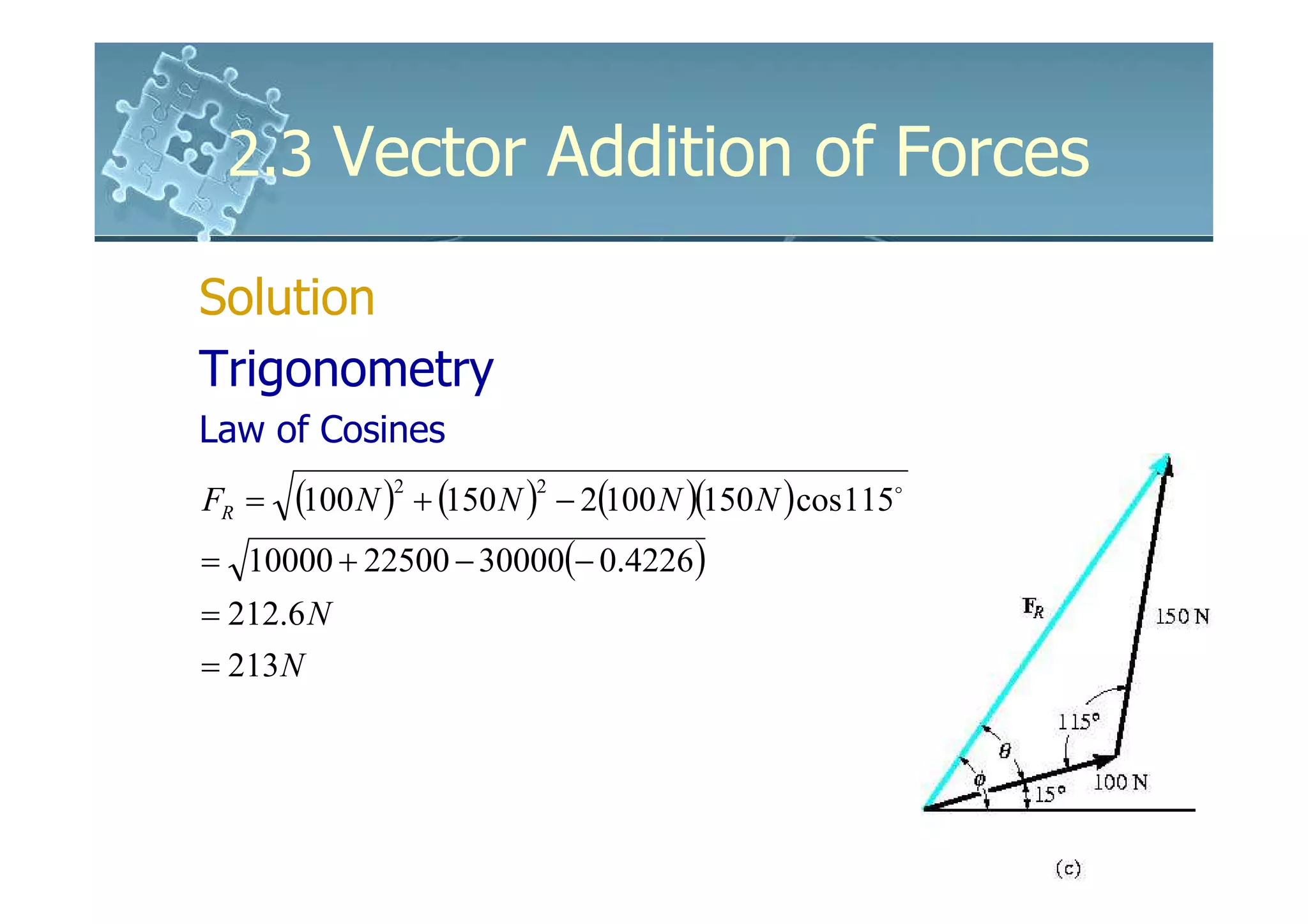
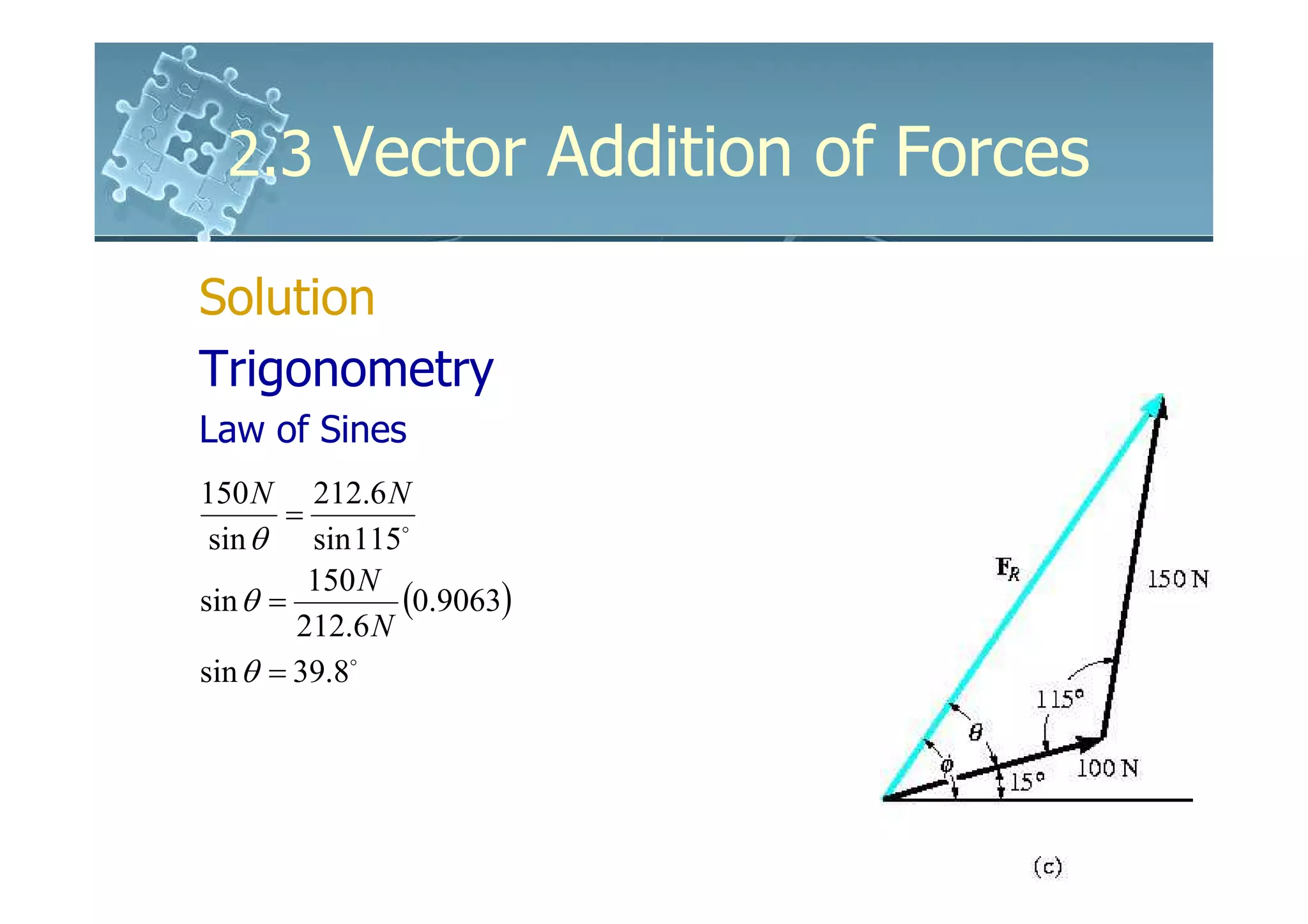
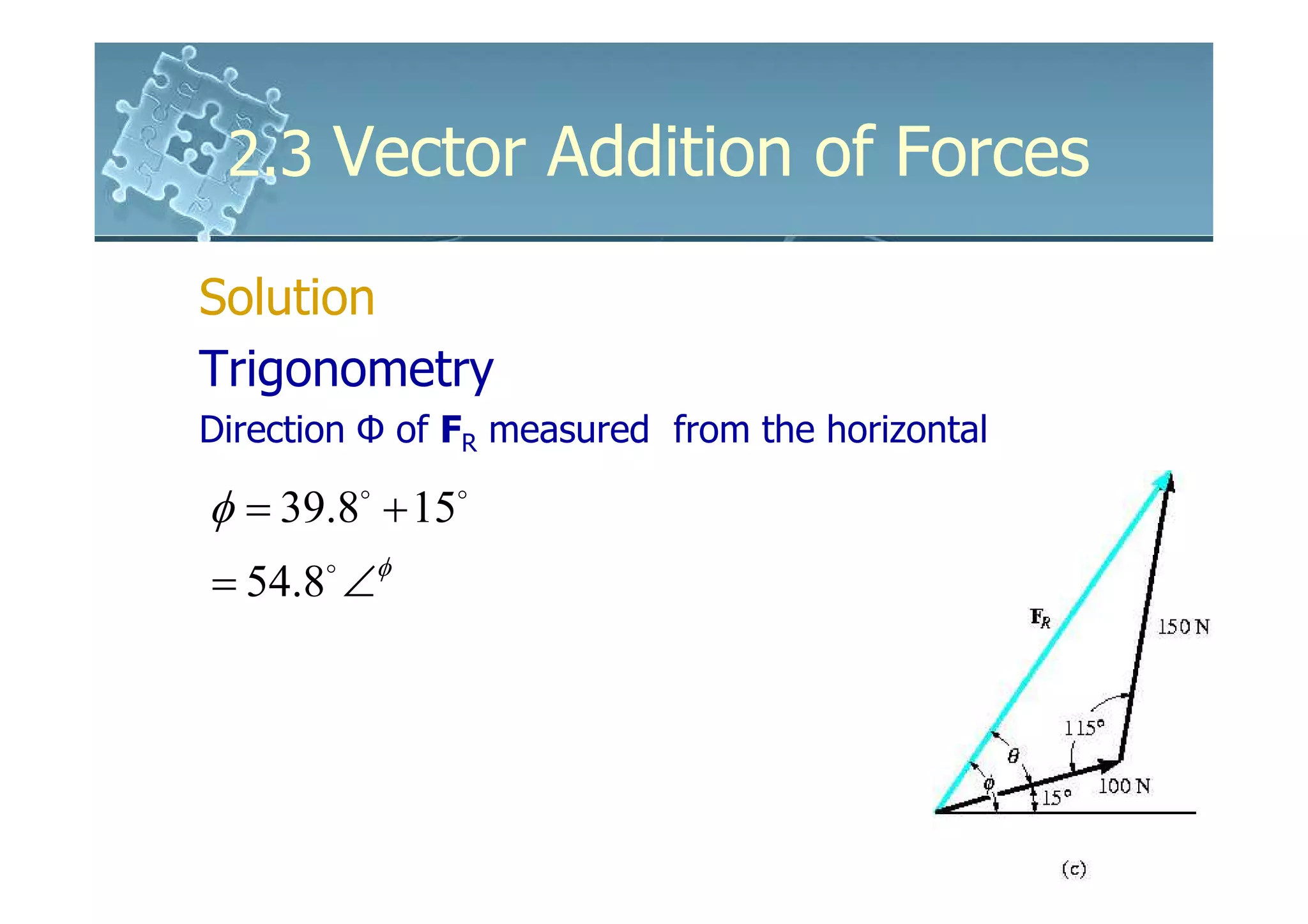
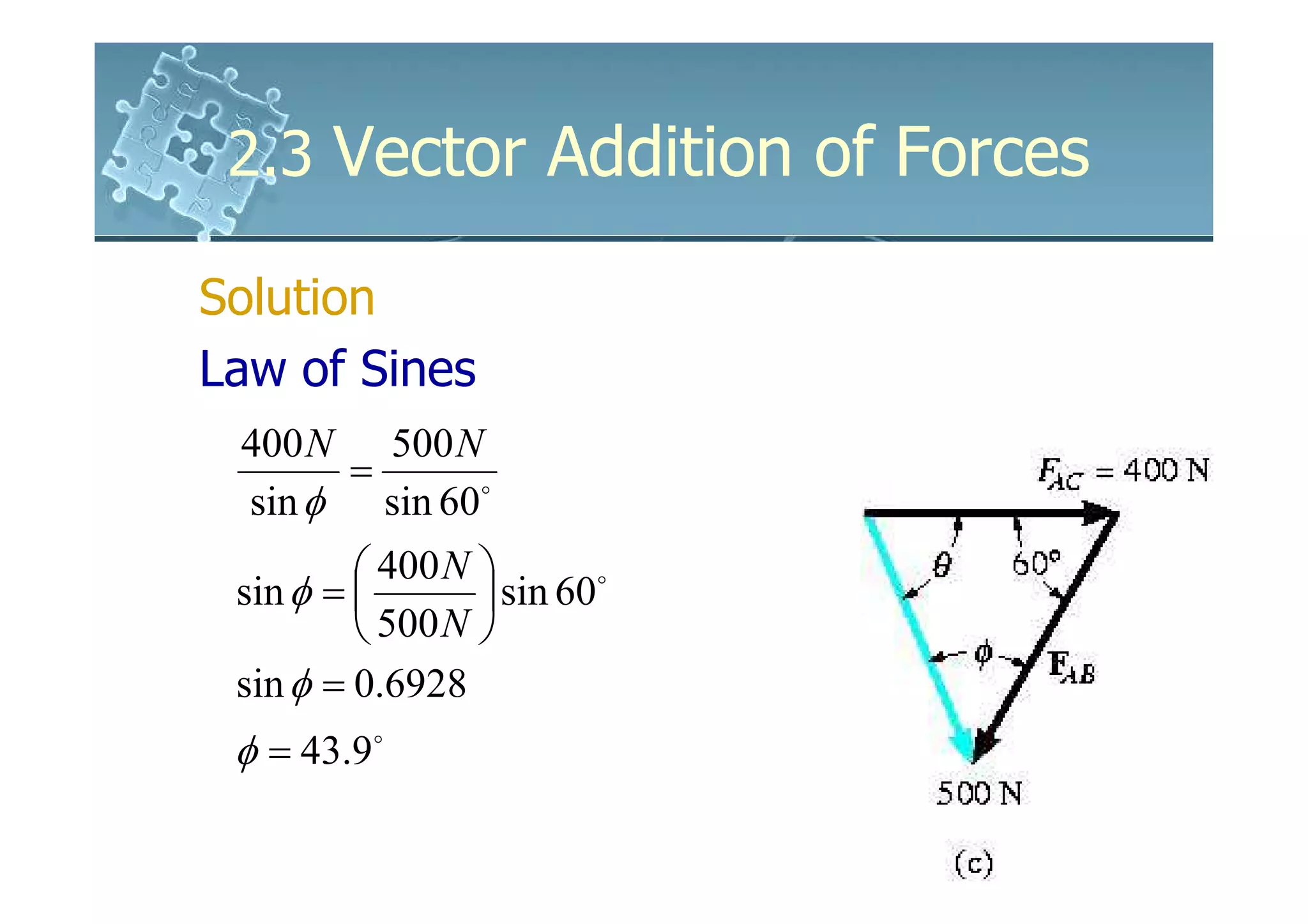
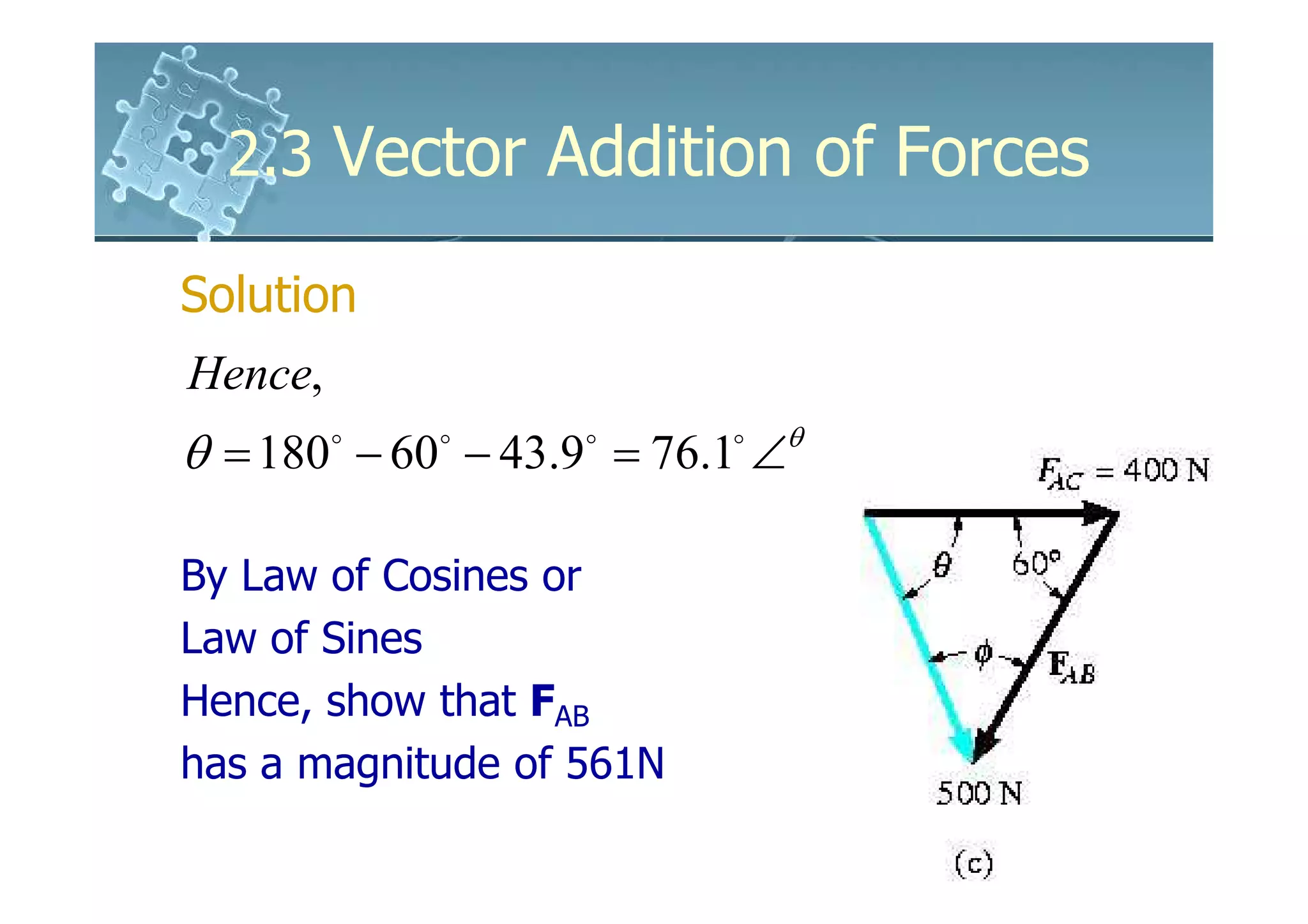
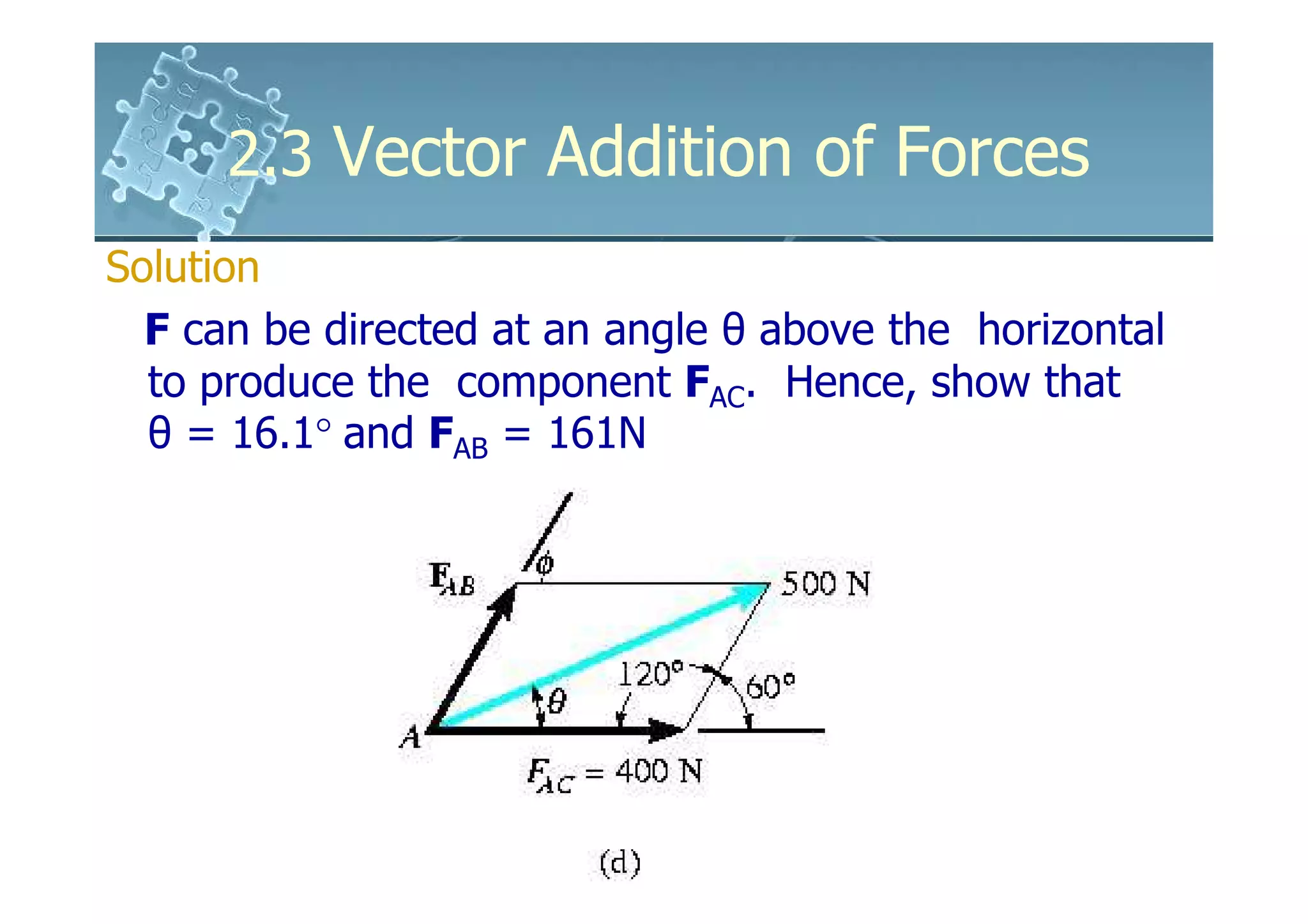
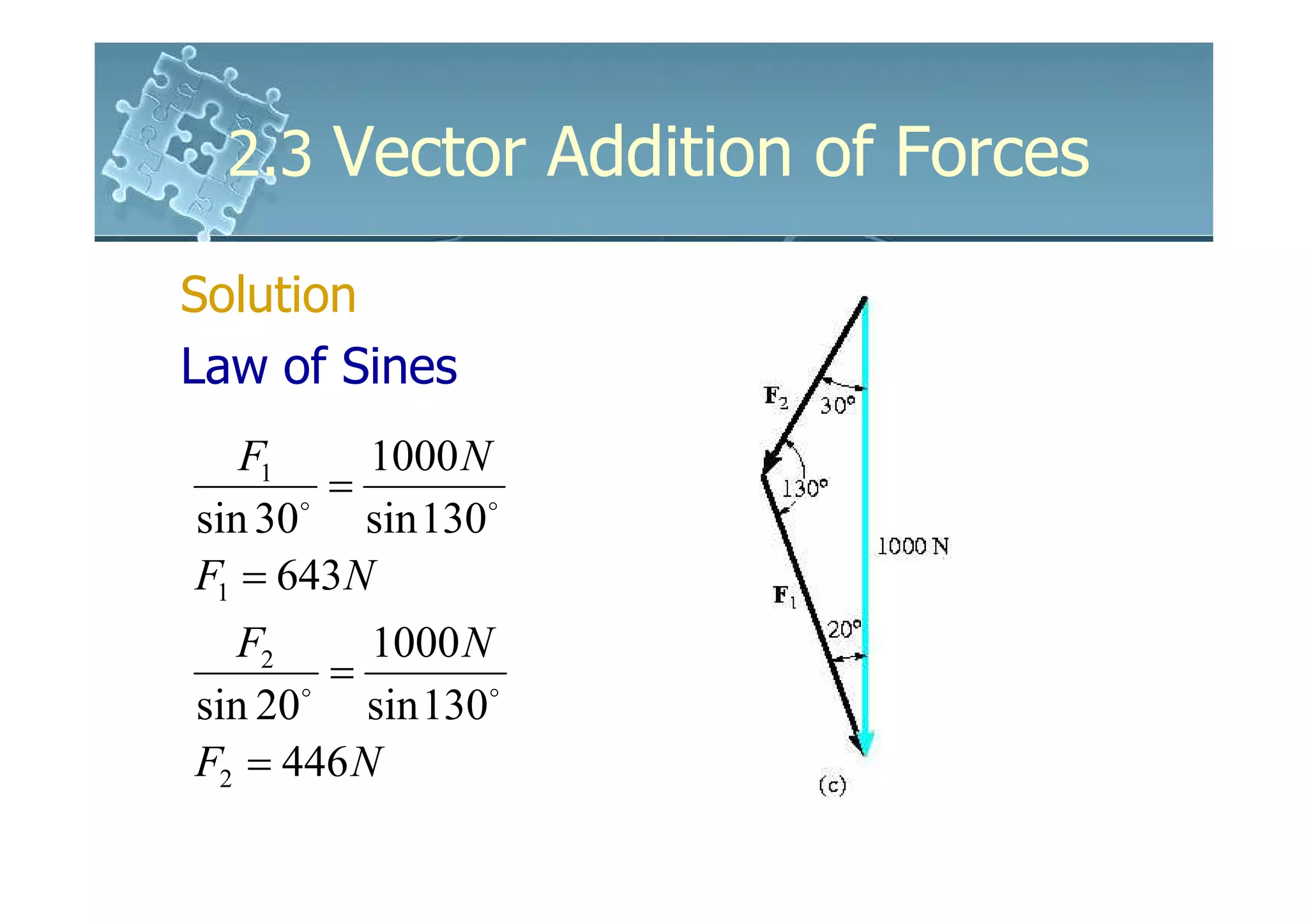
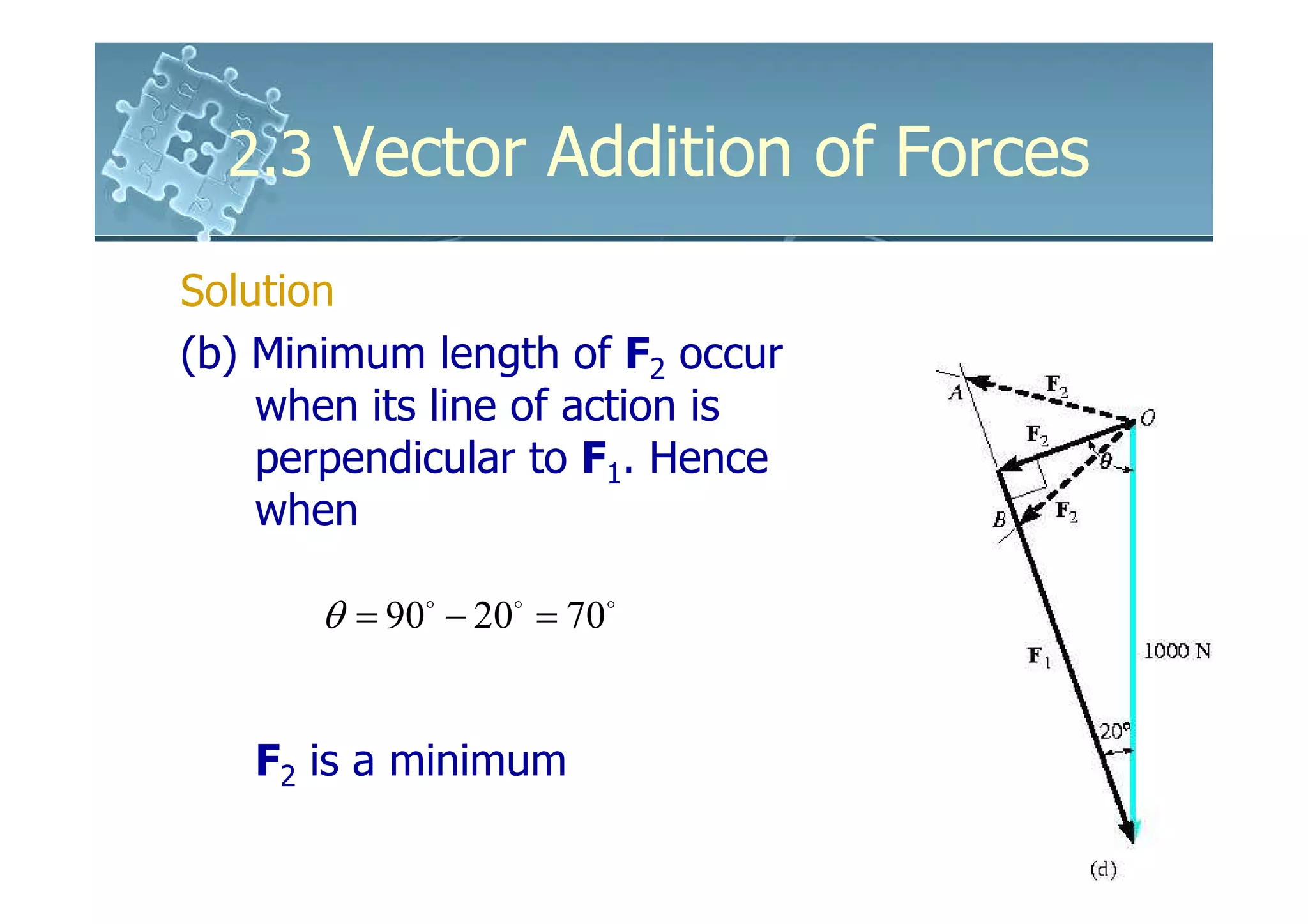
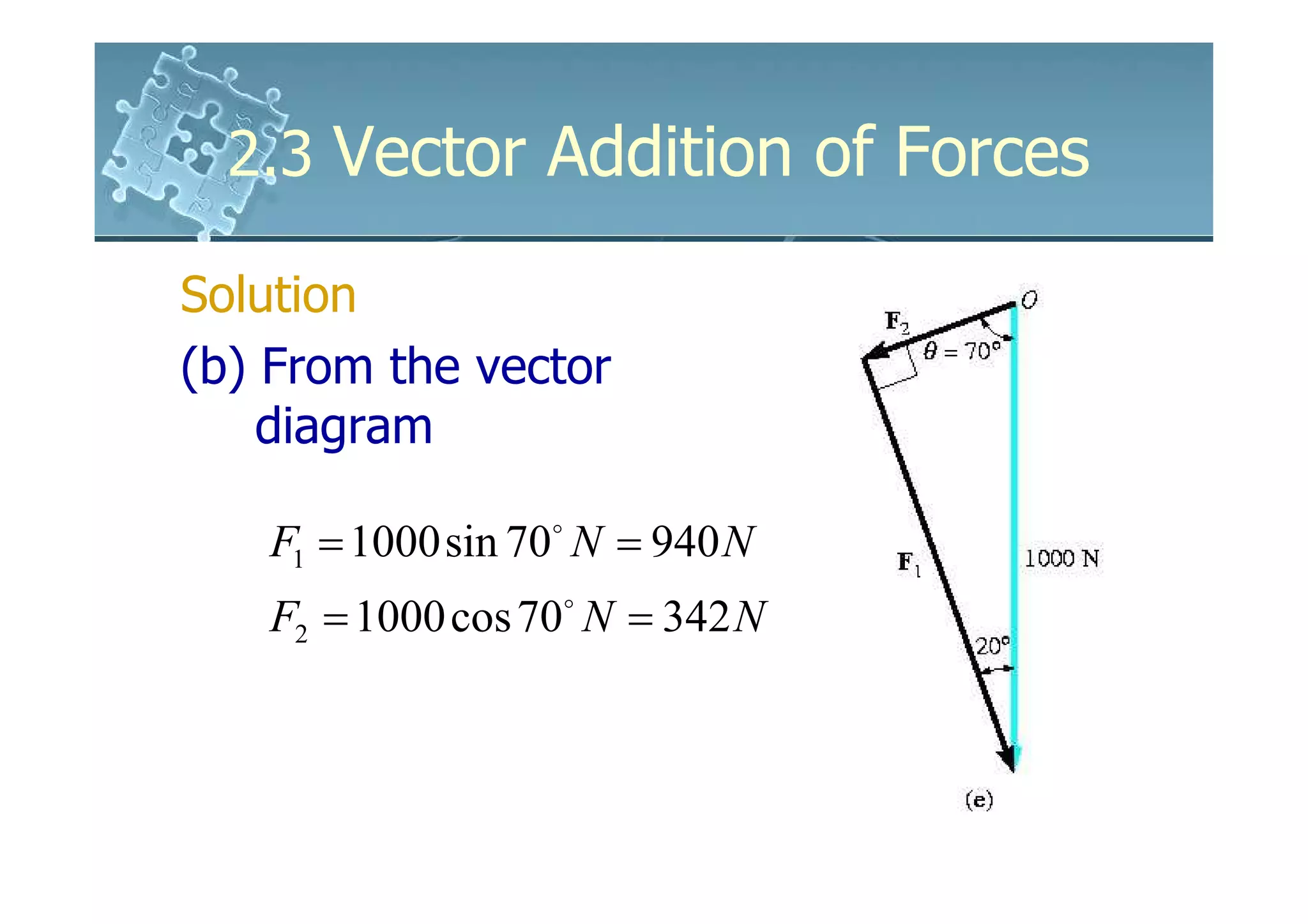
3) Trigonometric relationships like the law of sines and cosines allow determining the magnitudes and directions of resultant and component forces.

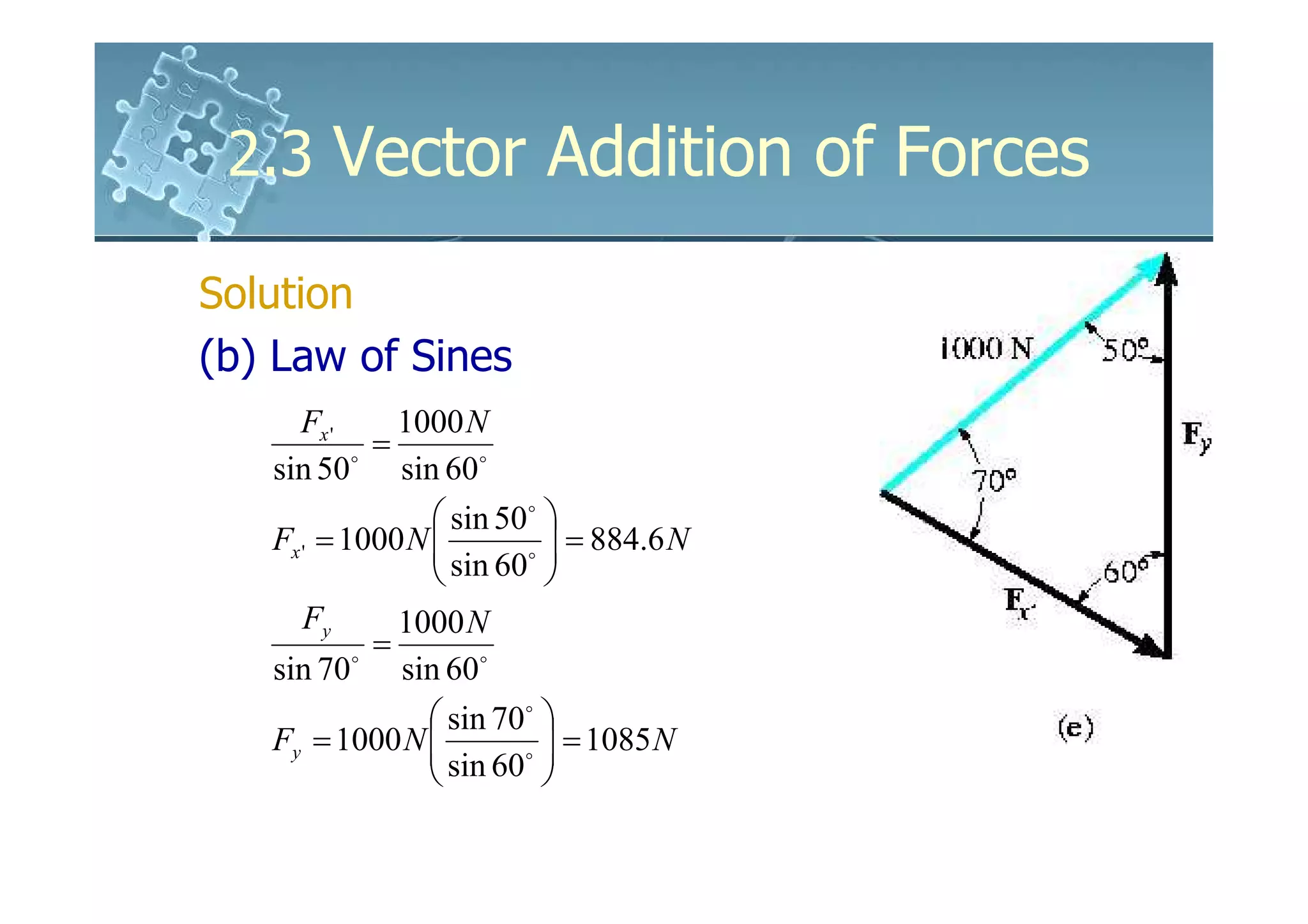





























![]Trial kedah spm 2012 physics [70 c85257]](https://cdn.slidesharecdn.com/ss_thumbnails/trialkedahspm2012physics70c85257-130919203954-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





















































![Vibe Coding vs. Spec-Driven Development [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/vibecodingvsspecdrivendevelopment-251209105622-43f455e7-thumbnail.jpg?width=640&height=640&fit=bounds)












