Download as PDF, PPTX

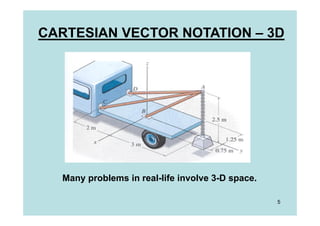
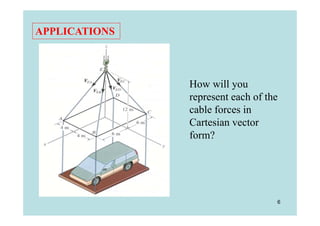
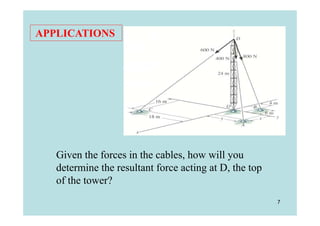
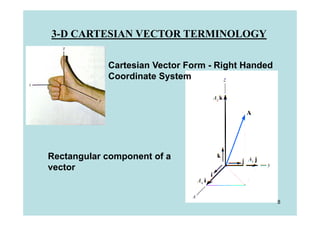
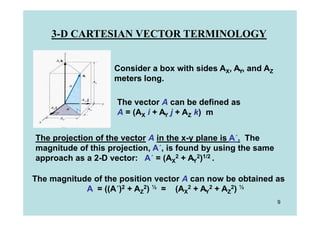
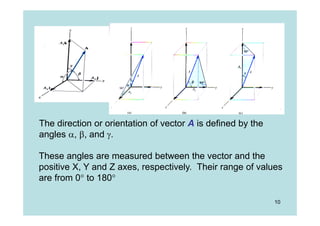
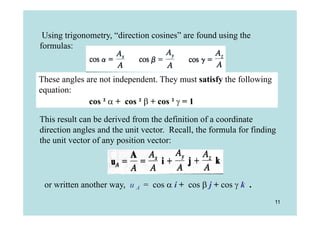
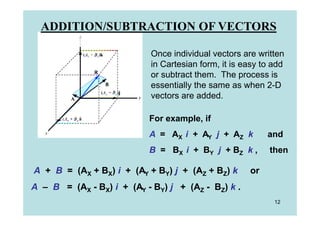
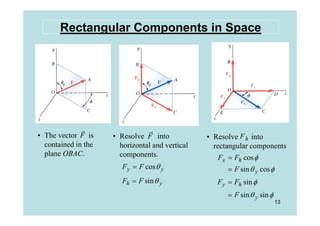
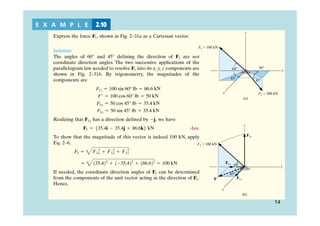
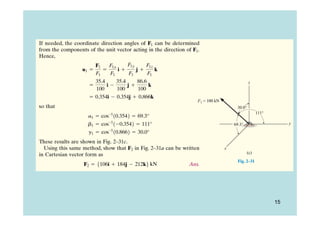
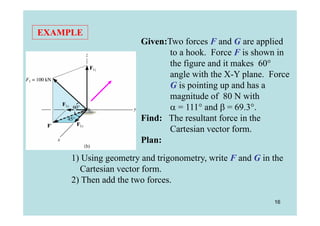
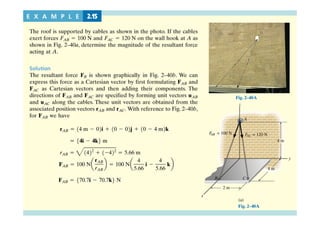
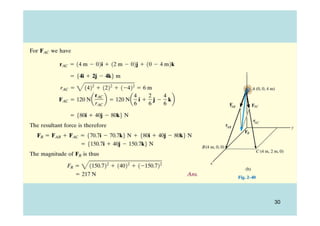

This document discusses representing and calculating vectors in 3 dimensions using Cartesian coordinates. It begins by reviewing 2D vector concepts like resolving vectors into components and adding vectors. It then introduces 3D vector notation and terminology for defining a vector's magnitude, direction angles, and direction cosines in a Cartesian coordinate system. Examples are provided for writing vectors in Cartesian form, adding vectors, and determining the magnitude and direction of a resultant vector. The document also discusses representing position vectors and force vectors directed along a line in 3D space using Cartesian coordinates.






![Sumi e.book.[gvchsn]](https://cdn.slidesharecdn.com/ss_thumbnails/sumi-e-book-gvchsn-130614033853-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)





























