Download as PDF, PPTX
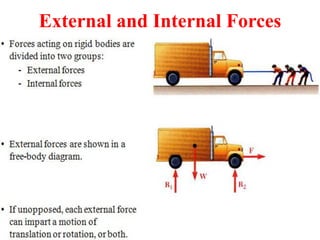
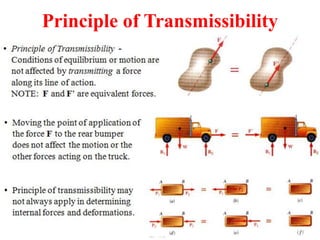
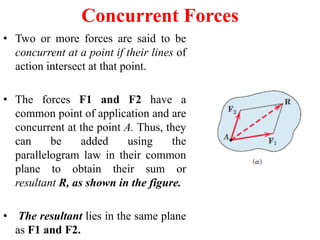
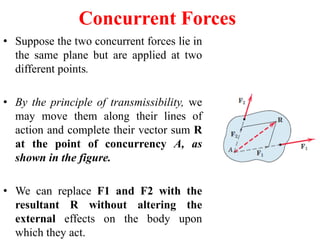
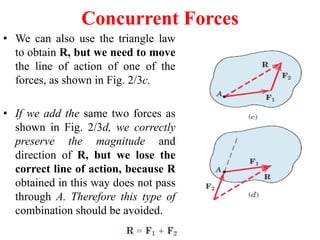
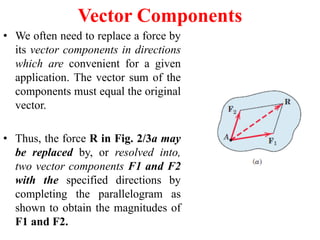
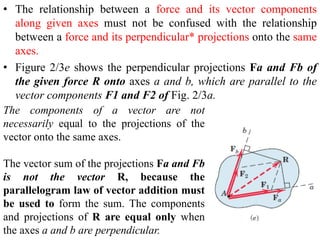
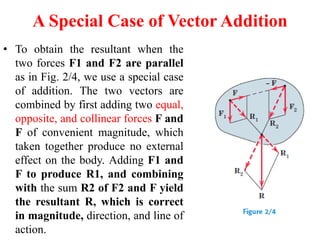
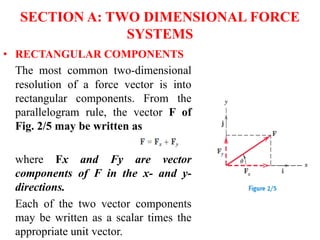
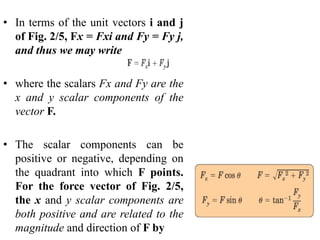
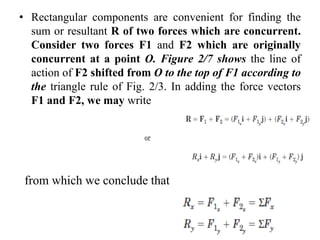
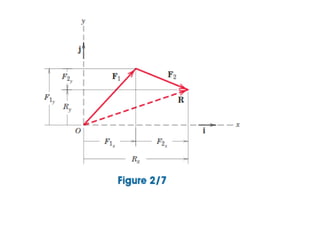
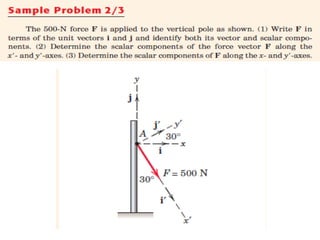
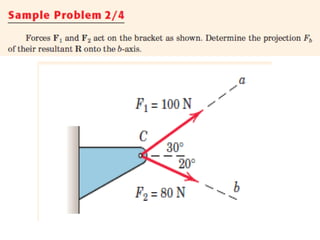


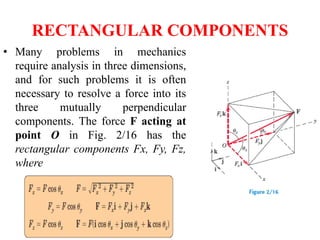





This document provides an overview of forces and force systems in engineering. It introduces the concept of a force vector and its components. Key points covered include: - A force vector depends on both magnitude and direction. Most bodies are treated as rigid. - Any system of forces on a rigid body can be replaced by a single force and couple. The principle of transmissibility allows treating forces as "sliding vectors". - Forces are classified as contact or body forces, and as concentrated or distributed. Weight is treated as a concentrated force through the center of gravity. - Methods for adding concurrent forces include the parallelogram and triangle laws. Forces can be resolved into rectangular components.



































![Ctm 154[1]](https://cdn.slidesharecdn.com/ss_thumbnails/ctm1541-190506153756-thumbnail.jpg?width=640&height=640&fit=bounds)












![CONSTRUCTION [soil treatment, foundation backfill, Damp Proof Membrane[DPM] a...](https://cdn.slidesharecdn.com/ss_thumbnails/kahimba-181220112907-thumbnail.jpg?width=640&height=640&fit=bounds)