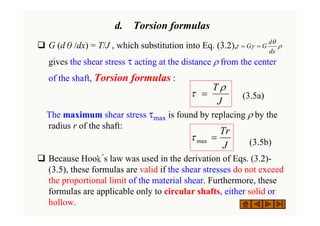
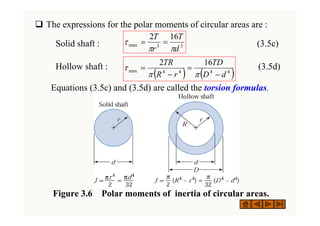
This document discusses torsion and torsion of circular shafts. It introduces torsion, defines the assumptions made in analyzing torsion of circular shafts, and derives the equations for shear strain, stress, angle of twist, and torque-twist relationship. It provides the torsion formulas for solid and hollow circular shafts. Sample problems are included to demonstrate calculating shear stress, torque, and angle of twist in statically indeterminate torsion problems.

![Notes on the Computation of angle of Twist
٠ 1.In the U.S. Customary system, the consistent units are G [ psi ],
T [ lb.in ] , and L [ in.], and J [ in.4 ]; in the SI system, the
consistent units are G [ Pa ], T [ N.m ], L [ m ], and J [ m4 ].
٠ 2.The unit of θin Eqs. (3.4) is radians, regardless of which
system of unit is used in the computation.
٠ 3.Represent torques as vectors using the right-hand rule, as
illustrated in Fig. 3.5. The same sign convention applies to the
angle of twistθ.
Figure 3.5 Sign
Conventions
for Torque T
and angle of
twist Τ.](https://image.slidesharecdn.com/chap03-torsion-221106170504-39263e36/85/torsion-10-320.jpg)

6
4
10
12
32
/
2
12
4
12
600
12
3
12
400
12
5
12
500
×
×
×
+
×
×
−
×
×
=
π](https://image.slidesharecdn.com/chap03-torsion-221106170504-39263e36/85/torsion-22-320.jpg)













![01 01 chapgere[1]](https://cdn.slidesharecdn.com/ss_thumbnails/01-01chapgere1-130611230425-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















![MTORSION [EngineeringDuniya.co MTORSION [EngineeringDuniya.com].pptm].ppt](https://cdn.slidesharecdn.com/ss_thumbnails/mtorsionengineeringduniya-241112074730-b7e902c3-thumbnail.jpg?width=640&height=640&fit=bounds)






![3_torsion [Read-Only] [Compatibility Mode].pdf](https://cdn.slidesharecdn.com/ss_thumbnails/3torsionread-onlycompatibilitymode-240505061844-ecf49736-thumbnail.jpg?width=640&height=640&fit=bounds)


























