長岡技術科学大学
2015年度先端GPGPUシミュレーション工学特論(全15回,大学院生対象講義)
第7回総和計算(Atomic演算)
2015年度先端GPGPUシミュレーション工学特論
・第1回 先端シミュレーションおよび産業界におけるGPUの役割
http://www.slideshare.net/ssuserf87701/2015gpgpu1-59180313
・第1回補足 GROUSEの利用方法
http://www.slideshare.net/ssuserf87701/2015gpgpu1-59180326
・第2回 GPUによる並列計算の概念とメモリアクセス
http://www.slideshare.net/ssuserf87701/2015gpgpu2-59180382
・第3回 GPUプログラム構造の詳細(threadとwarp)
http://www.slideshare.net/ssuserf87701/2015gpgpu3-59180483
・第4回 GPUのメモリ階層の詳細(共有メモリ)
http://www.slideshare.net/ssuserf87701/2015gpgpu4-59180572
・第5回 GPUのメモリ階層の詳細(様々なメモリの利用)
http://www.slideshare.net/ssuserf87701/2015gpgpu5-59180652
・第6回 プログラムの性能評価指針(Flop/Byte,計算律速,メモリ律速)
http://www.slideshare.net/ssuserf87701/2015gpgpu6-59180736
・第7回 総和計算(Atomic演算)
http://www.slideshare.net/ssuserf87701/2015gpgpu7-59180844
・第8回 偏微分方程式の差分計算(拡散方程式)
http://www.slideshare.net/ssuserf87701/2015gpgpu8-59180918
・第9回 偏微分方程式の差分計算(移流方程式)
http://www.slideshare.net/ssuserf87701/2015gpgpu9-59180982
・第10回 Poisson方程式の求解(線形連立一次方程式)
http://www.slideshare.net/ssuserf87701/2015gpgpu10-59181031
・第11回 数値流体力学への応用(支配方程式,CPUプログラム)
http://www.slideshare.net/ssuserf87701/2015gpgpu11-59181134
・第12回 数値流体力学への応用(GPUへの移植)
http://www.slideshare.net/ssuserf87701/2015gpgpu12-59181230
・第13回 数値流体力学への応用(高度な最適化)
http://www.slideshare.net/ssuserf87701/2015gpgpu13-59181316
・第14回 複数GPUの利用
http://www.slideshare.net/ssuserf87701/2015gpgpu14-59181367
・第15回 CPUとGPUの協調
http://www.slideshare.net/ssuserf87701/2015gpgpu15-59181450
2015年度GPGPU実践基礎工学
・第1回 学際的分野における先端シミュレーション技術の歴史
http://www.slideshare.net/ssuserf87701/2015gpgpu1
2015年度GPGPU実践プログラミング
・第1回 GPGPUの歴史と応用例
http://www.slideshare.net/ssuserf87701/2015gpgpu1-59179080
講義には長岡技術科学大学のGPGPUシステム(GROUSE)を利用しています。
開発環境
CPU Intel Xeon X5670 × 32
GPU NVIDIA Tesla M2050(Fermi世代) × 64
CUDA 4.0(諸般の事情によりバージョンアップされていません)
PGI Fortran 11.3

![リダクション(Reduction,換算)
2015/05/28先端GPGPUシミュレーション工学特論3
配列の全要素から一つの値を抽出
総和,総積,最大値,最小値など
ベクトル和や移動平均,差分法とは処理が異なる
リダクションの特徴
データ参照が大域的
計算順序は交換可能
出力が一つ
出力は並列に計算できない
並列化に工夫が必要 sum
a[i]
+ + + + + +](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-3-320.jpg)
![リダクション(Reduction,換算)
2015/05/28先端GPGPUシミュレーション工学特論4
リダクションの特徴
データ参照が大域的
計算順序は交換可能
出力が一つ
出力は並列に計算できない
並列化に工夫が必要
ベクトル和の特徴
データ参照が局所的
計算が独立
多出力
出力は並列に計算できる
単純に並列化可能
c[i]
a[i]
b[i]
+ + + + + +
sum
a[i]
+ + + + + +](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-4-320.jpg)
![#include<stdio.h>
#include<stdlib.h>
#define N (256)
#define Nbytes (N*sizeof(int))
int reduction(int *idata){
int sum,i;
sum = 0;
for(i=0;i<N;i++){
sum += idata[i];
}
return sum;
}
void init(int *idata){
int i;
for(i=0;i<N;i++){
idata[i] = 1;
}
}
int main(){
int *idata,sum;
idata = (int *)malloc(Nbytes);
init(idata);
sum = reduction(idata);
printf("sum = %d¥n", sum);
free(idata);
return 0;
}
総和計算のCPUプログラム
2015/05/28先端GPGPUシミュレーション工学特論5
reduction.c](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-5-320.jpg)
![ベクトル和の並列化
2015/05/28先端GPGPUシミュレーション工学特論6
forループをスレッドの数だけ分割
1スレッドが一つの配列添字を計算
for(i=0;i<N;i++){
c[i]=a[i]+b[i];
}
i=blockIdx.x*blockDim.x+threadIdx.x;
c[i]=a[i]+b[i];
c[i]
a[i]
b[i]
+ + + +
スレッド
0
スレッド
2
スレッド
1
スレッド
3](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-6-320.jpg)
![sum
+ + + +
総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論7
GPUでは並列計算が必須
ベクトル和のようにforループを分割
for(i=0;i<N;i++){
sum += idata[i];
}
i=blockIdx.x*blockDim.x+threadIdx.x;
sum += idata[i];
?
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i]](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-7-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論8
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 0
a[i] 1 2 3 4
sumの値(0)を参照
スレッド
0
スレッド
2
スレッド
1
スレッド
3](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-8-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論9
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 0
0+1を書込み
1
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-9-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論10
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 0
0+2を書込み
2
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-10-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論11
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 2
sumの値(2)を参照
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-11-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論12
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 2
2+4を書込み
6
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-12-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論13
単純な並列化は不可能
データ競合(データレース)が発生
1.各スレッドが配列a[i]の値を読込み,
レジスタに格納
2.各スレッドが変数sumの値を読込み,
レジスタに格納したa[i]と加算
3.各スレッドがレジスタの値でsumを更新
スレッドがメモリにアクセスした順
番によって結果が変化
プログラム実行毎に変化 sum = 2
2+3を書込み
5
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-13-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論14
単純な並列化は不可能
単一スレッドの処理が正しく(逐次実行の
通りに)実行されない
値の読み込み→加算→結果の書き込み
Read‐Modify‐Write
他のスレッドに割り込まれずにRead‐
Modify-Writeを実行する仕組み
が必要
Atomic演算
他のスレッドに任せられない最小単位の
処理
sum = 1
スレッド
0
スレッド
2
スレッド
1
スレッド
3
a[i] 1 2 3 4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-14-320.jpg)

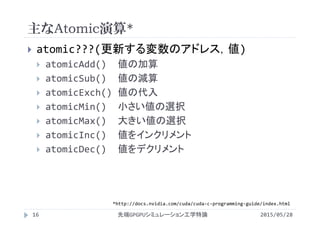
![atomicAdd
2015/05/28先端GPGPUシミュレーション工学特論17
atomicAdd
値の加算
signed int, unsigned int, unsigned long long
int, float(Fermi世代以降)をサポート
__global__ void reduction(int *input, int *sum){
int i=blockIdx.x*blockDim.x + threadIdx.x;
atomicAdd(sum, input[i]);
}
アドレス 値
マルチスレッドで処理しているように見えるが,
本質的に逐次実行と同じ](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-17-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論18
リダクションの並列性
並列性なし
i=0の処理が終了しないとi=1の処理ができない
リダクションの並列化
リダクションの特徴に適した並列化が必要
Parallel Reduction
for(i=0;i<N;i++){
sum += idata[i];
}](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-18-320.jpg)
![総和計算の並列化
2015/05/28先端GPGPUシミュレーション工学特論19
リダクションの並列化
演算順序の変更による並列性の確保
カスケード計算(associative fan‐in algorithm)
カスケード計算
加算の結合法則を利用
乗算や比較でも利用可能
配列要素数が2の冪乗以外では適用
に工夫が必要
変数に浮動小数を用いる場合は値が
一致しないことがある
sum
a[i]
+ + + +
+ +
+](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-19-320.jpg)

![#include<stdio.h>
#include<stdlib.h>
#define N (512)
#define Nbytes (N*sizeof(int))
#define NT (1)
#define NB (1)
__global__ void reduction0(int *idata,int *odata){
int i;
odata[0] = 0;
for(i=0;i<N;i++){
odata[0] += idata[i];
}
}
void init(int *idata){
int i;
for(i=0;i<N;i++){
idata[i] = 1;
}
}
GPUプログラム(1スレッド実装)
2015/05/28先端GPGPUシミュレーション工学特論21
reduction0.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-21-320.jpg)

![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
0 54.6 0.035 121 0.032
23](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-23-320.jpg)

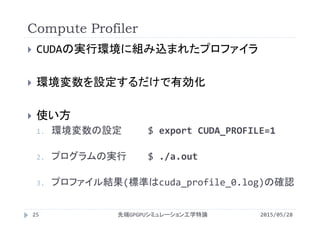


![プロファイル結果の確認
2015/05/28先端GPGPUシミュレーション工学特論28
標準で出力される値
method カーネルや関数(API)の名称
gputime GPU上で処理に要した時間(s単位)
cputime CPUで処理(=カーネル起動)に要した時間
実際の実行時間=cputime+gputime
occupancy 同時実行されているWarp数と実行可能な最大
Warp数の比(一般的には1に近いほどよい)
$ cat cuda_profile_0.log
# CUDA_PROFILE_LOG_VERSION 2.0
# CUDA_DEVICE 0 Tesla M2050
# TIMESTAMPFACTOR fffff6139ae53e88
method,gputime,cputime,occupancy
method=[ memcpyHtoD ] gputime=[ 2.208 ] cputime=[ 42.000 ]
method=[ _Z10reduction0PiS_ ] gputime=[ 120.704 ] cputime=[ 15.000 ] occupancy=[ 0.021 ]
method=[ memcpyDtoH ] gputime=[ 2.592 ] cputime=[ 164.000 ]](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-28-320.jpg)

![#include<stdio.h>
#include<stdlib.h>
#define N (512)
#define Nbytes (N*sizeof(int))
#define NT (256)
#define NB (N/NT)
__global__ void reduction0(int *idata, int *sum){
int i = blockIdx.x*blockDim.x + threadIdx.x;
atomicAdd(sum,idata[i]);
}
void init(int *idata){
//初期化の内容は同じなので省略
}
GPUプログラム(atomic演算)
2015/05/28先端GPGPUシミュレーション工学特論30
reduction0atomic.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-30-320.jpg)

![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
0 54.6 0.035 121 0.032
atomic 11.8 0.162 19.7 0.194
32](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-32-320.jpg)
![総和の並列実行(Ver.1)
2015/05/28先端GPGPUシミュレーション工学特論33
1ブロック内の複数のスレッドが並列に加算を実行
1スレッドは「自身が読み込む配列要素iの値」と「隣の配列
要素の値」を加算
idata[i]
+ + + +
+ +
+
idata[i]
idata[i]
idata[i] odata[0]](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-33-320.jpg)




![__global__ void reduction1(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int step; //Reductionの段数をカウントする変数
int stride; //隣の配列要素までの距離
stride = 1;
for(step=1;step<=STEP;step++){
if(tx%(2*stride)==0){
idata[i] = idata[i]+idata[i+stride];
}
__syncthreads();
stride = stride*2;
}
if(tx==0) odata[0] = idata[0];
}
GPUプログラム(Ver.1)
2015/05/28先端GPGPUシミュレーション工学特論38
reduction1.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-38-320.jpg)
![odata[0]
各Stepでの総和計算(Step 1)
2015/05/28先端GPGPUシミュレーション工学特論39
ストライドを保持する変数strideを1に
初期化
カウンタ変数stepを1に初期化
処理を行うスレッドを選択
スレッド番号を2で割った剰余が0
除数はstride*2
スレッド番号が2の倍数と0スレッドが「自身が
読み込む配列要素iの値」と「隣の配列要素
の値」を加算
スレッド間の同期をとる
ストライドを2倍して次のstepに備える
+ + + +
+ +
+
Step 1
Step 2
Step 3
stride = 1;
for(step=1;step<=STEP;step++){
if(tx%(stride*2)==0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
stride = stride*2;
}
スレッド0 スレッド2 スレッド4 スレッド6](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-39-320.jpg)
![odata[0]
各Stepでの総和計算(Step 2)
2015/05/28先端GPGPUシミュレーション工学特論40
stepを2に進める
strideを2倍(stride=2)
処理を行うスレッドを選択
スレッド番号をstride*2で割った剰余が0
スレッド番号が4の倍数と0のスレッドが「自
身が読み込む配列要素iの値」と「隣
の配列要素の値」を加算
スレッド間の同期をとる
ストライドを2倍して次のstepに備える
+ + + +
+ +
+
Step 1
Step 2
Step 3
stride = 1;
for(step=1;step<=STEP;step++){
if(tx%(stride*2)==0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
stride = stride*2;
}
スレッド0 スレッド4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-40-320.jpg)
![odata[0]
各Stepでの総和計算(Step 3)
2015/05/28先端GPGPUシミュレーション工学特論41
stepを3に進める
strideを2倍(stride=4)
処理を行うスレッドを選択
スレッド番号をstride*2で割った剰余が0
スレッド番号が8の倍数と0のスレッドが「自
身が読み込む配列要素iの値」と「隣
の配列要素の値」を加算
スレッド間の同期をとる
ストライドを2倍して次のstepに備える
stepがlog2Nに達するまで繰り返す
+ + + +
+ +
+
Step 1
Step 2
Step 3
stride = 1;
for(step=1;step<=STEP;step++){
if(tx%(stride*2)==0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
stride = stride*2;
}
スレッド0](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-41-320.jpg)
![各Stepでの総和計算(結果の書き出し)
2015/05/28先端GPGPUシミュレーション工学特論42
スレッド0が総和を出力用変数odataに
書き込んで終了
+ + + +
+ +
+
Step 1
Step 2
Step 3
if(tx==0) odata[0] = idata[0];
odata[0]
スレッド0](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-42-320.jpg)
![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
0 54.6 0.035 121 0.032
atomic 11.8 0.162 19.7 0.194
1 9.73 0.196 12.8 0.297
43](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-43-320.jpg)

![__global__ void reduction1(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int step; //Reductionの段数をカウントする変数
int stride; //隣の配列要素までの距離
//ストライドを2倍
for(step=1,stride = 1;step<=STEP;step++, stride = stride*2;){
if(tx%(stride*2)==0){
idata[i] = idata[i]+idata[i+stride];
}
__syncthreads();
}
if(tx==0) odata[0] = idata[0];
}
GPUプログラム(Ver.1.1)
2015/05/28先端GPGPUシミュレーション工学特論46
reduction1shift.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-46-320.jpg)

![__global__ void reduction1(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int step; //Reductionの段数をカウントする変数
int stride; //隣の配列要素までの距離
//ストライドを左に一つビットシフト(値が2倍になる)
for(step=1,stride = 1;step<=STEP;step++, stride<<=1;){
if(tx%(stride*2)==0){
idata[i] = idata[i]+idata[i+stride];
}
__syncthreads();
}
if(tx==0) odata[0] = idata[0];
}
GPUプログラム(Ver.1.1)
2015/05/28先端GPGPUシミュレーション工学特論48
reduction1shift.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-48-320.jpg)
![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
1 9.73 0.196 12.8 0.297
1.1 9.70 0.197 12.8 0.298
49](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-49-320.jpg)

![__global__ void reduction1(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int step; //Reductionの段数をカウントする変数 //#define STEPも削除
int stride; //隣の配列要素までの距離
for(stride = 1; stride <= blockDim.x/2; stride<<=1){
if(tx%(2*stride) == 0){
idata[i] = idata[i]+idata[i+stride];
}
__syncthreads();
}
if(tx==0) odata[0] = idata[0];
}
GPUプログラム(Ver.1.2)
2015/05/28先端GPGPUシミュレーション工学特論51
reduction1stride.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-51-320.jpg)
![odata[0]
各Stepでの総和計算(Step 1)
2015/05/28先端GPGPUシミュレーション工学特論52
ストライドを保持する変数strideを1に
初期化
処理を行うスレッドを選択
スレッド番号を2で割った剰余が0
除数はstride*2
スレッド番号が2の倍数と0スレッドが「自身が
読み込む配列要素iの値」と「隣の配列要素
の値」を加算
スレッド間の同期をとる
ストライドを2倍し,ストライドがN/2以下
ならループを継続
+ + + +
+ +
+
stride
が1の段
for(stride = 1; stride <= blockDim.x/2;
stride<<=1){
if(tx%(2*stride) == 0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
}
スレッド0 スレッド2 スレッド4 スレッド6](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-52-320.jpg)
![odata[0]
各Stepでの総和計算(Step 2)
2015/05/28先端GPGPUシミュレーション工学特論53
処理を行うスレッドを選択
スレッド番号をstride*2で割った剰余が0
スレッド番号が4の倍数と0のスレッドが「自
身が読み込む配列要素iの値」と「隣
の配列要素の値」を加算
スレッド間の同期をとる
ストライドを2倍し,ストライドがN/2以下
ならループを継続
strideが4になるのでstride=N/2
※NとblockDim.xが等しくなるように設定し
ているため
+ + + +
+ +
+
stride
が2の段
for(stride = 1; stride <= blockDim.x/2;
stride<<=1){
if(tx%(2*stride) == 0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
}
スレッド0 スレッド4](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-53-320.jpg)
![odata[0]
各Stepでの総和計算(Step 3)
2015/05/28先端GPGPUシミュレーション工学特論54
処理を行うスレッドを選択
スレッド番号をstride*2で割った剰余が0
スレッド番号が8の倍数と0のスレッドが「自
身が読み込む配列要素iの値」と「隣
の配列要素の値」を加算
スレッド間の同期をとる
ストライドを2倍し,ストライドがN/2以下
ならループを継続
strideが8になるのでstride>N/2となって
ループを抜ける
+ + + +
+ +
+stride
が4の段
for(stride = 1; stride <= blockDim.x/2;
stride<<=1){
if(tx%(2*stride) == 0){
idata[i]=idata[i]+idata[i+stride];
}
__syncthreads();
}
スレッド0](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-54-320.jpg)
![各Stepでの総和計算(結果の書き出し)
2015/05/28先端GPGPUシミュレーション工学特論55
スレッド0が総和を出力用変数odataに
書き込んで終了
+ + + +
+ +
+
if(tx==0) odata[0] = idata[0];
odata[0]
スレッド0](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-55-320.jpg)
![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
実行時間が増加
forループに対する最適化が抑制された?
#pragma unrollでループ展開してもLoop was not unrolled,
cannot deduce loop trip countというメッセージが出力
Nを変更するとSTEPも変更されるなら,バージョン1.1でもよい
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
1 9.73 0.196 12.8 0.297
1.1 9.70 0.197 12.8 0.298
1.2 12.8 0.149 18.3 0.209
56](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-56-320.jpg)

![総和の並列実行(Ver.2)
2015/05/28先端GPGPUシミュレーション工学特論58
全スレッドがグローバルメ
モリから共有メモリへデー
タをコピー
共有メモリ上で総和を計算
1ブロック内の複数のスレッ
ドが並列に加算を実行
1スレッドは「自身が読み込む
配列要素iの値」と「隣の配列
要素の値」を加算
s_idata[i]
+ + + +
+ +
+
s_idata[i]
s_idata[i]
s_idata[i]odata[0]
idata[i]](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-58-320.jpg)



![__global__ void reduction2(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int stride; //”隣”の配列要素までの距離
__shared__ volatile int s_idata[N]; //共有メモリの宣言
s_idata[i] = idata[i]; //グローバルメモリから共有メモリへデータをコピー
__syncthreads(); //共有メモリのデータは全スレッドから参照されるので同期を取る
//総和計算はVer.1.2(reduction1stride.cu)と同じ
for(stride = 1; stride <= blockDim.x/2; stride<<=1){
if(tx%(2*stride) == 0){
s_idata[i] = s_idata[i]+s_idata[i+stride];
}
__syncthreads();
}
if(tx==0) odata[0] = s_idata[0];
}
GPUプログラム(Ver.2)
2015/05/28先端GPGPUシミュレーション工学特論62
reduction2.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-62-320.jpg)
![volatile修飾子
2015/05/28先端GPGPUシミュレーション工学特論63
コンパイラの最適化を抑制
複数のスレッドからアクセスされる変数に対する最適化
コンパイラが不要と判断して処理を削除
複数スレッドが変数の値をプライベートな領域にコピーし
て書き戻さない等
このバージョンでは不要だが後々必要
さらに最適化する場合は必須
volatile int s_idata[NT];](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-63-320.jpg)
![総和計算
2015/05/28先端GPGPUシミュレーション工学特論64
ブロック内の全スレッドがグローバルメ
モリへアクセスし,データを共有メモリへ
コピー
全スレッドが1回は何らかの処理を行う
総和計算はVer.1.2と同じ
取り扱う配列がidata[]からs_idata[]に
変更されているだけ
+ + + +
strideが
1の段
s_idata[i] = idata[i];
__syncthreads();
idata[i]
s_idata[i]](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-64-320.jpg)
![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
カーネル
N=512 N=1024
実行時間
[s]
データ転送
[GB/s]
実行時間
[s]
データ転送
[GB/s]
0 54.6 0.035 121 0.032
atomic 11.8 0.162 19.7 0.194
1 9.73 0.196 12.8 0.297
2 10.9 0.175 15.9 0.240
65](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-65-320.jpg)


![総和の並列実行(Ver.3)
2015/05/28先端GPGPUシミュレーション工学特論68
ブロック内の全スレッドが
グローバルメモリから共有
メモリへデータをコピー
共有メモリ上で総和を計算
1ブロック内の複数のス
レッドが並列に加算を実行
主な変更点
共有メモリを参照する添字
アトミック演算の追加
s_idata[tx]
+ + + +
+ +
s_idata[tx]
idata[i]
+
sum
blockIdx.x=0 blockIdx.x=1
+](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-68-320.jpg)
![総和の並列実行(Ver.3)
2015/05/28先端GPGPUシミュレーション工学特論69
実装に必要な情報
部分和の記録場所
s_idata[0]
共有メモリ用の配列添字と
グローバルメモリ用の配列
添字の区別
s_idata[tx]
+ + + +
+ +
s_idata[tx]
idata[i]
blockIdx.x=0
+
+
blockIdx.x=1
sum](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-69-320.jpg)


![__global__ void reduction3(int *idata,int *odata){
int i = blockIdx.x*blockDim.x + threadIdx.x;//スレッドと配列要素の対応
int tx = threadIdx.x; //スレッド番号
int stride; //”隣”の配列要素までの距離
__shared__ volatile int s_idata[NT]; //共有メモリの宣言
s_idata[tx] = idata[i]; //グローバルメモリから共有メモリへデータをコピー
__syncthreads(); //共有メモリのデータは全スレッドから参照されるので同期を取る
//総和計算はバージョン1.2(reduction1stride.cu)と同じ
for(stride = 1; stride <= blockDim.x/2; stride<<=1){
if(tx%(2*stride) == 0){
s_idata[tx] = s_idata[tx]+s_idata[tx+stride];
}
__syncthreads();
}
if(tx==0) atomicAdd(odata,s_idata[tx]);
}
GPUプログラム(Ver.3)
2015/05/28先端GPGPUシミュレーション工学特論72
reduction3.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-72-320.jpg)
![総和計算
2015/05/28先端GPGPUシミュレーション工学特論73
共有メモリサイズは1ブロックが処理する
データの数と同じ
ブロック内の全スレッドがグローバルメ
モリへアクセスし,データを共有メモリへ
コピー
総和計算はバージョン1.2と同じ
グローバルメモリにアクセスするための配列
添字i
共有メモリにアクセスするための配列添字tx
+ + + +
strideが
1の段
__shared__ volatile int s_idata[NT];
s_idata[tx] = idata[i];
__syncthreads();
idata[i]
s_idata[tx]
i= 0 1 2 3 4 5 6 7
threadIdx.x= 0 1 2 3 0 1 2 3](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-73-320.jpg)
![+
+
各ブロックでの部分和の計算
2015/05/28先端GPGPUシミュレーション工学特論74
ストライドを保持する変数strideを1に
初期化
処理を行うスレッドを選択
スレッド番号を2で割った剰余が0
除数はstride*2
スレッド番号が2の倍数と0スレッドが「自身が
読み込む配列要素iの値」と「隣の配列要素
の値」を加算
スレッド間の同期をとる
ストライドを2倍し,ストライドがN/2以下
ならループを継続
+ + + +
+ +
strideが
1の段
for(stride = 1; stride <= blockDim.x/2;
stride<<=1){
if(tx%(2*stride) == 0){
s_idata[tx]=s_idata[tx]+s_idata[tx+stride];
}
__syncthreads();
}
スレッド0 スレッド2 スレッド0 スレッド2](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-74-320.jpg)
![+
+
各ブロックでの部分和の計算
2015/05/28先端GPGPUシミュレーション工学特論75
処理を行うスレッドを選択
スレッド番号をstride*2で割った剰余が0
スレッド番号が4の倍数と0のスレッドが「自
身が読み込む配列要素iの値」と「隣
の配列要素の値」を加算
スレッド間の同期をとる
ストライドを2倍し,ストライドがN/2以下
ならループを継続
strideが4になるのでstride >
blockDim.x/2となってループを抜ける
+ + + +
+ +strideが
2の段
for(stride = 1; stride <= blockDim.x/;
stride<<=1){
if(tx%(2*stride) == 0){
s_idata[i]=s_idata[i]+s_idata[i+stride];
}
__syncthreads();
}
スレッド0 スレッド0
for(stride = 1; stride <= blockDim.x/2;
stride<<=1){
if(tx%(2*stride) == 0){
s_idata[tx]=s_idata[tx]+s_idata[tx+stride];
}
__syncthreads();
}](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-75-320.jpg)
![各ブロックでの部分和の計算(結果の出力)
2015/05/28先端GPGPUシミュレーション工学特論76
各ブロックのスレッド0がatomicAdd()
を呼び出す
各ブロックのs_idata[0]に計算された
部分和が格納
各ブロックのスレッド0が,部分和をグローバルメ
モリsumへ排他的に加算
+ + + +
+ +
if(tx==0) atomicAdd(sum,s_idata[tx]);
sum
スレッド0 スレッド0
+
+](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-76-320.jpg)
![実行時間
2015/05/28先端GPGPUシミュレーション工学特論
配列要素数が少なくてもスレッド数を適切に決定できる
配列要素数を大きくするにつれてデータ転送レートが向上
atomic演算はそこまで遅くない?
カーネルの最適化が十分なのか検討が必要
77
N(NT) 実行時間 [s] データ転送[GB/s]
29(256) 8.80 0.217
210(256) 8.83 0.432
212(256) 9.47 1.61
214(256) 15.1 4.04
216(256) 43.2 5.65
218(256) 155 6.30
220(256) 596 6.55
カーネルVer.2の結果
10.9 ms, 0.175 GB/s
カーネルVer.2の結果
15.9 ms, 0.240 GB/s](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-77-320.jpg)


![__global__ void reduction3(TYPE *idata, TYPE *sum){
int i = blockIdx.x*blockDim.x + threadIdx.x;
int tx = threadIdx.x;
int stride;
__shared__ volatile TYPE s_idata[NT];
s_idata[tx] = idata[i];
__syncthreads();
for(stride = 1; stride <= blockDim.x/2; stride<<=1){
if(tx%(2*stride) == 0){
s_idata[tx] = s_idata[tx]+s_idata[tx+stride];
}
__syncthreads();
}
if(tx==0) atomicAdd(sum,s_idata[tx]);
}
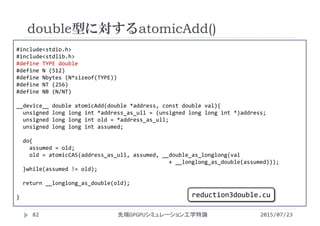
double型に対するatomicAdd()
2015/07/23先端GPGPUシミュレーション工学特論83
reduction3double.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-81-320.jpg)
![void init(TYPE *idata){
int i;
for(i=0;i<N;i++){
idata[i] = 1;
}
}
int main(){
TYPE *idata,*odata;
TYPE *host_idata,sum;
cudaMalloc( (void **)&idata, Nbytes);
cudaMalloc( (void **)&odata, sizeof(TYPE));
host_idata = (TYPE *)malloc(Nbytes);
init(host_idata);
cudaMemcpy(idata, host_idata,Nbytes, cudaMemcpyHostToDevice);
free(host_idata);
double型に対するatomicAdd()
2015/07/23先端GPGPUシミュレーション工学特論84
reduction3double.cu](https://image.slidesharecdn.com/advancedgpgpu07-160307060152/85/2015-GPGPU-7-Atomic-82-320.jpg)
























![[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018)](https://cdn.slidesharecdn.com/ss_thumbnails/201807263dv-180728060959-thumbnail.jpg?width=640&height=640&fit=bounds)