6
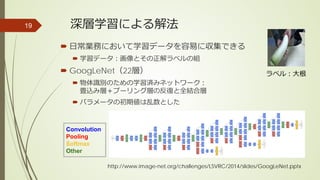
Digitally reconstructed
radiograph (DRR)
Coordinates mapping by simulating X-ray projection in
data space [Lemieux94]
SimulationData
space
Real
space
X-ray
source
X-ray image
Position of the
real patient can
be estimated if
the DRR
matches the
X-ray image
Projection
Preoperative
CT volume
2-D/3-D 位置合わせ
7.
GPU implementation7
GPU SideCPUSide
CT
volume
2-D
image
DRR
1) DRR
generation
Gradient
DRR
Gradient
image
2) Gradient image generation
Reduction
3) NCC computation
Similarity
evaluation
5 floating point numbers
P:
Position &
orientation
Input data
P
Minimize
communication
between CPU and GPU
Bottleneck
offloaded to GPU
Update
P
Data transfer
8.
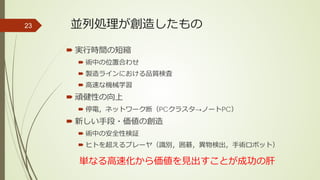
DRR generation
Graphics-orientedsolution: DRR generation from CT
volume is almost the same computation as volume
rendering
We select the texture-based rendering method
[Cullip93], which exploits the hardware components in
the GPU
8
Viewing direction
CT volume
Volume slicing by
texture mapping
Screen
Slice composition by
alpha blending
9.
Performance results
GPU-basedsystem
Laptop PC (Dell Precision M70)
CPU: Pentium 4 2.8-GHz
GPU: NVIDIA Quadro FX Go 1400
Video memory: 256MB
Cluster-based system
Cluster of 64 PCs
CPU: Dual Pentium 3 1-GHz
Network: Myrinet-2000 (2 Gb/s)
9
1
GPU
1
CPU
128
CPUs
1) DRR (ms) 19 2940 142
2) Gradient
(ms)
4 142 7
3) NCC (ms) 28 9 46
Total per
iteration (ms)
51 3091 195
300 iterations 15 s 15 m 58 s
10.
Cone beam reconstruction
A technique for producing volume data
Input data: a series of 2-D projections taken by CT scanner
Output data: 3-D volume
Feldkamp, Davis and Kress (FDK) algorithm
Standard but memory-intensive reconstruction method
135 s on a single-core CPU using SSE instructions
Acceleration is needed for real-time imaging
GPU (8.9 s), Cell B.E. (19 s), and FPGA (40 s)
10
Imaging Reconstruction
A series of 2-D projections Volume
Scan rotation
Cone beam CT
11.
FDK algorithm
Input/outputdata
Input: a series of projections
Output: Volume
Filtering stage
Convolution between projections
and Shepp-Logan filter
Backprojection stage
accumulates pixels on filtered
projections to voxels
iterates accumulation for every projection
has perfect parallelism between different voxels
11
Volume F
X-ray source
Filtered
projection
Qi
u
v
Interpolated
pixel (u,v)
Rotation
F(x,y,z) = ∑ Wi(x,y) Qi(u,v)
Volume Weight Projectioni



![6
Digitally reconstructed
radiograph (DRR)
Coordinates mapping by simulating X-ray projection in
data space [Lemieux94]
SimulationData
space
Real
space
X-ray
source
X-ray image
Position of the
real patient can
be estimated if
the DRR
matches the
X-ray image
Projection
Preoperative
CT volume
2-D/3-D 位置合わせ](https://image.slidesharecdn.com/ino2-170214080920/85/slide-6-320.jpg)

![DRR generation
Graphics-oriented solution: DRR generation from CT
volume is almost the same computation as volume
rendering
We select the texture-based rendering method
[Cullip93], which exploits the hardware components in
the GPU
8
Viewing direction
CT volume
Volume slicing by
texture mapping
Screen
Slice composition by
alpha blending](https://image.slidesharecdn.com/ino2-170214080920/85/slide-8-320.jpg)






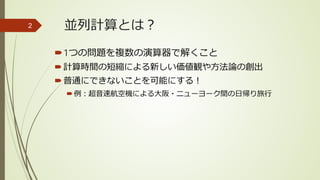
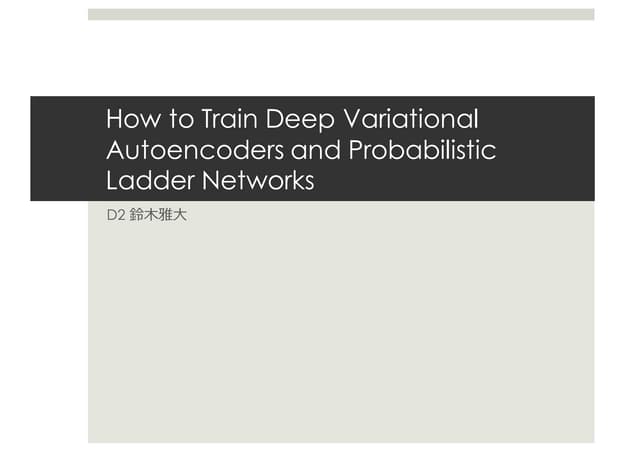
![接頭辞和(prefix sums)問題に帰着
一見して逐次性が強そうだが並列に解ける問題
i 番目までの和を配列 A[i] に格納
演算子 ⊕ が結合則を満たせば並列処理できる
袖を除去するアイデア
16
𝑥𝑥 ⊕ 𝑦𝑦 ⊕ 𝑧𝑧 ⇔ (𝑥𝑥 ⊕ 𝑦𝑦) ⊕ 𝑧𝑧
𝑛𝑛個の要素なら
𝑂𝑂(log 𝑛𝑛) ステップ
1 1 1 1 1 1 1 1
1 2 3 4 5 6 7 8
+
+ +
+
+ + +
+ +
+
+](https://image.slidesharecdn.com/ino2-170214080920/85/slide-16-320.jpg)














![[DL輪読会]Progressive Growing of GANs for Improved Quality, Stability, and Varia...](https://cdn.slidesharecdn.com/ss_thumbnails/kuboshizuma20180316-180525003941-thumbnail.jpg?width=640&height=640&fit=bounds)



![SSII2021 [OS2-01] 転移学習の基礎:異なるタスクの知識を利用するための機械学習の方法](https://cdn.slidesharecdn.com/ss_thumbnails/os2-02final-210610091211-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Inverse Constrained Reinforcement Learning](https://cdn.slidesharecdn.com/ss_thumbnails/20210709icrl-210709021811-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会]Set Transformer: A Framework for Attention-based Permutation-Invariant...](https://cdn.slidesharecdn.com/ss_thumbnails/20200221settransformer-200221020423-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Graph R-CNN for Scene Graph Generation](https://cdn.slidesharecdn.com/ss_thumbnails/graphr-cnnforscenegraphgenerationkobayashi1130-181130001547-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL Hacks]Visdomを使ったデータ可視化](https://cdn.slidesharecdn.com/ss_thumbnails/dlhacks20181115-181116004623-thumbnail.jpg?width=640&height=640&fit=bounds)